



增量调制(△M)是继PCM后的又一种语音信号数字化的方法。与PCM相比,其编码器和译码器简单,且对数字通信系统的误码性能要求较低,因而广泛应用于军事和其他一些专用网中。
1.△M编码原理
基于△M的模拟信号数字化同样要经过取样、量化和编码3个步骤。其数字化过程可用图7-12加以说明,图中m(t)是需要数字化的模拟信号,按一定的取样速率对模拟信号取样,每得到一个取样值,将其与前一取样值的量化电平进行比较,如果该取样值大于前一个样值的量化电平,则该取样值的量化电平在前一个量化电平的基础上上升一个台阶δ,编码输出“1”,反之,如果该取样值小于前一个样值的量化电平,则该取样值的量化电平在前一个量化电平的基础上下降一个台阶δ,同时编码输出“0”,图中m′(t)表示由各取样值的量化电平所确定的阶梯波形。
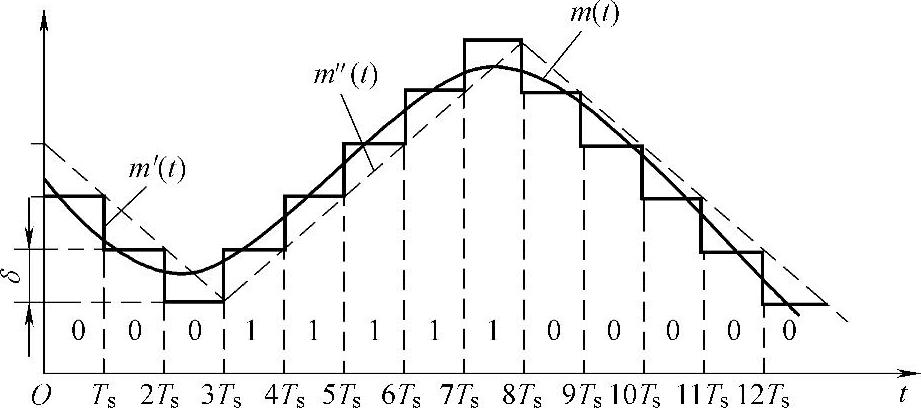
图7-12 △M数字化过程示意图
2.△M译码原理
接收端收到二进制代码后恢复模拟信号的过程称为译码。译码方法是:收到代码“1”,输出信号上升一个台阶δ;收到代码“0”,输出信号下降一个台阶δ。如果台阶的上升或下降是在瞬间完成的,则译码输出信号是个阶梯波,如图7-12中的m′(t)。如果使用积分器来实现在一个码元宽度(取样间隔)内线性地上升或下降一个台阶,则译码输出信号为图7-12中的m″(t)。不管是m′(t)还是m″(t),都需要用一个低通滤波器来进一步平滑,低通滤波器的输出为恢复的模拟信号。
采用积分器的△M编码和译码原理框图如图7-13所示。
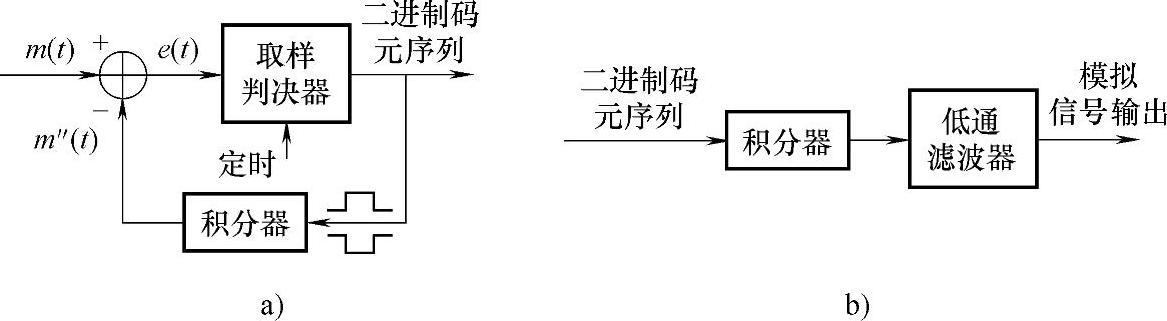
图7-13 △M编译码原理框图
a)编码器 b)译码器
3.△M系统中的噪声
采用△M实现模拟信号数字传输的系统称为△M系统,框图如图7-14所示。

图7-14 △M系统原理框图
与PCM系统一样,△M系统中引起mo(t)与m(t)之间误差的噪声也有两类,一类是△M编码产生的量化噪声,另一类是数字通信系统误码引起的误码噪声。
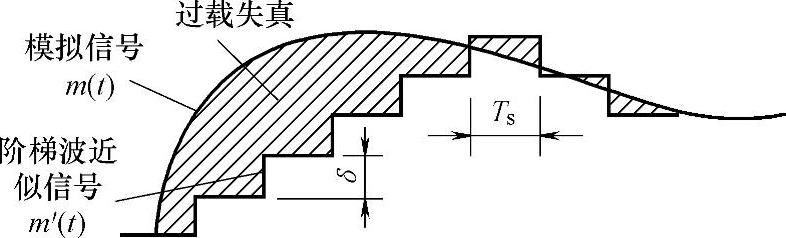
图7-15 过载量化噪声示意图
(1)量化噪声
△M系统中的量化噪声有两种:一般量化噪声和过载量化噪声,如图7-15所示。
1)过载量化噪声。当信号发生急剧变化时,阶梯波m′(t)会因跟不上模拟信号m(t)的变化而产生很大的误差,这种现象称为过载,由此产生的误差称为过载量化噪声。实际系统中应避免过载现象的发生。
避免出现过载的条件:

式中, 为模拟信号的最大斜率;δfs为台阶与取样速率的乘积,称为最大跟踪斜率。(https://www.xing528.com)
为模拟信号的最大斜率;δfs为台阶与取样速率的乘积,称为最大跟踪斜率。(https://www.xing528.com)
可见,增大δ或提高取样速率fs都能使最大跟踪斜率增大,避免过载的发生。但增大δ会使一般量化噪声增大,提高取样速率fs会使数字化后的二进制码元速率增大,占用数字通信系统更多的带宽,使有效性降低。
当fs和δ给定时,设输入模拟信号为m(t)=Acos(2πf0t),则不发生过载所允许的信号最大幅度为

2)一般量化噪声。在不发生过载的情况下,模拟信号m(t)与其量化信号m′(t)之间的误差就是一般量化噪声。
当模拟信号为m(t)=Acos(2πf0t)时,不发生过载的最大量化信噪比为

用分贝表示为
(So/Nq)max≈(30lgfs-20lgf0-10lgfm-14)dB (7-22)
式中,fm为低通滤波器的截止频率,对于语音信号常取fm=3000Hz。
结论:
●取样频率每提高一倍,量化信噪比就提高9dB,记为9dB/倍频程。
●信号频率每提高一倍,量化信噪比就下降6dB,记为-6dB/倍频程。
●对于语音信号,也可用式(7-22)来近似估算量化信噪比,常取f0=800~1000Hz。
●取样速率fs=32kHz才满足语音信号的通信要求。
(2)误码噪声
当模拟信号为m(t)=Acos(2πf0t)时,在不发生过载的条件下低通滤波器输出端的最大误码信噪比为

结论:
●误码信噪比与数字通信系统的误码率成反比,误码率越小,误码信噪比越大。
●误码信噪比与取样频率成正比,取样频率越高,误码信噪比越大。
4.自适应增量调制(A△M)
自适应增量调制的基本思想是:根据信号变化的快慢自动改变台阶。即当信号变化快时,用大台阶,以确保不发生过载;当信号变化慢时,用小台阶,以减小一般量化噪声,如图7-16所示。
和台阶固定不变的△M系统相比,A△M系统能适应信号大的变化范围,故其动态范围更大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。