



目前3D打印机都是基于数学坐标系来描述打印物体的位置,并把对应的坐标计算并转化成电信号来控制各部分电动机运动。例如Reprap Mendel系列、Makerbot系列、Ultimaker系列3D打印机都是采用笛卡儿直角坐标系记录打印物体空间位置的。SCARA类型的3D打印机是采用二维极坐标系延伸的圆柱坐标系来描述打印物体空间位置并控制机械手臂运动。并联机构式3D打印机采用虚拟坐标系系统,没有传统意义上的坐标轴,通过非定长和非线性特征的复杂机械系统动力学建模,并动态进行多空间结构耦合,来描述打印物体与之对应的笛卡儿坐标系下的坐标。这种结合现代化空间建模技术的虚拟坐标系设计非常复杂,但结构上更有优势。
1.笛卡儿直角坐标系
过空间定点O做三条互相垂直的数轴,它们都以O为原点,具有相同的单位长度。这三条数轴分别称为x轴(横轴)、y轴(纵轴)、z轴(竖轴),统称为坐标轴。坐标轴用来定义一个坐标系的一组直线或一组线;位于坐标轴上的点的位置由一个坐标值来唯一确定,而其他的坐标在此轴上的值是零。如图2-12所示,任何一个点P在坐标系的位置,可以用直角坐标来表达。只要从点P画一条垂直于x轴的直线,这条直线与x轴的相交点,就是点P的x轴坐标。同样,可以找到点P的y轴坐标和z轴坐标。这样,即可以得到点P的直角坐标。
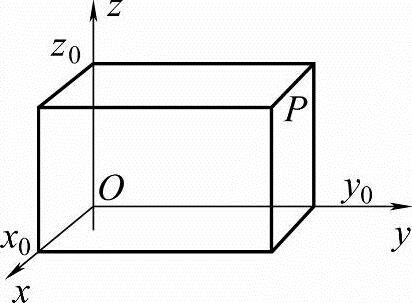
图2-12 笛卡儿直角坐标系
2.极坐标系
极坐标系(Polar Coordinates)是指在平面内由极点、极轴和极径组成的坐标系。在平面上取一点O,称为极点。从O出发引一条射线Ox,称为极轴。再取定一个长度单位,通常规定角度取逆时针方向为正。这样,平面上任一点P的位置就可以用线段OP的长度ρ以及从Ox到OP的角度θ来确定,有序数对(ρ,θ)就称为P点的极坐标,记为P(ρ,θ),ρ称为P点的极径,θ称为P点的极角,如图2-13所示。
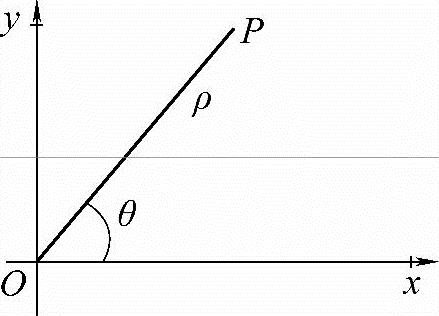
图2-13 极坐标系(https://www.xing528.com)
3.圆柱坐标系
圆柱坐标系是一种三维坐标系统。它是二维极坐标系往z轴的延伸。添加的第三个坐标专门用来表示P点离xy平面的高低。按照约定,径向距离、方位角、高度,分别标记为ρ、φ、z。
如图2-14所示,P点的圆柱坐标是(ρ,φ,z)。
ρ是P点与z轴的垂直距离(相当于二维极坐标中的半径r),φ是线OP在xy面的投影线与正x轴之间的夹角(相当于二维极坐标中的θ),z与直角坐标的z等值,即P点距xy平面的距离。
简单地说,有这个对应关系:x=ρcosφ,y=ρsinφ,z=z,如图2-14所示。
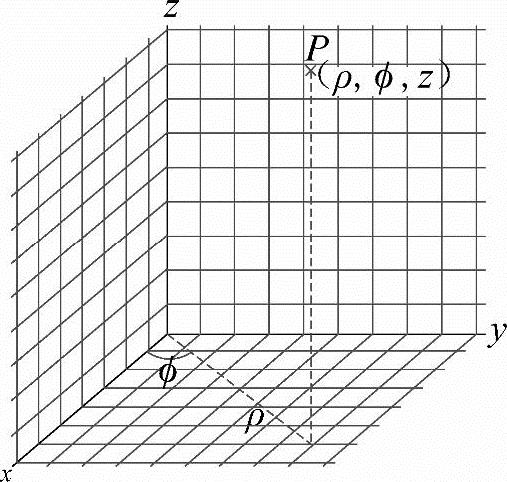
图2-14 圆柱坐标系
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。