



热流道系统的温度控制器都是组合式,每个流道板和喷嘴的控制区都有一个温度调节器,可以单独测温,自动加热控温。下面从温度调节原理介绍温度控制器的操作。
1.温度调节原理
热流道系统温度调节器的用途是测量流道板和喷嘴的温度并使其保持在给定的温度值。典型的温度控制回路如图8-38所示。
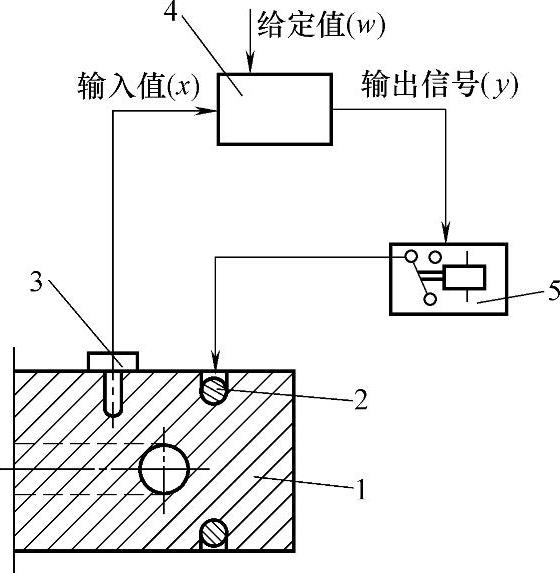
图8-38 典型的温度控制回路
1—流道板 2—加热器 3—热电偶 4—调节器 5—控制单元
见图8-38,从热电偶来的热电势的电压与被测温度呈线性关系,它是控制回路的输入值x,在温度调节器中,经电子线路,与人工设置的温度给定值w做比较。调节器的输出信号y,经它的控制单元,由继电器及电路开关控制加热器,执行加热的断开或断电。
设想在温度调节器出现之前,人工对注射模热流道的温度控制。操作工读出电压表上的流道板温度,然后根据目标温度,操作加热器的电压电位计或控制开关。自动控制的温度调节器与人工监测控制的区别,在于前者的加热器的温度控制结果反馈给温度调节器。
图8-39所示的温度调节器实现了信息反馈,但加热器被两位式的开关所控制。它进行着满功率的加热或断开。此控制方法使流道板有较大的温度起伏,会超出塑料注射加工温度的范围。
2.温度调节特性
温度调节器的特性对于热流道技术应用十分重要。调节器的特性是指它的输出y和输入x之间的关系。由于电热流道板和喷嘴的热滞后,两位式温度控制不适合热流道系统的加热和保温。
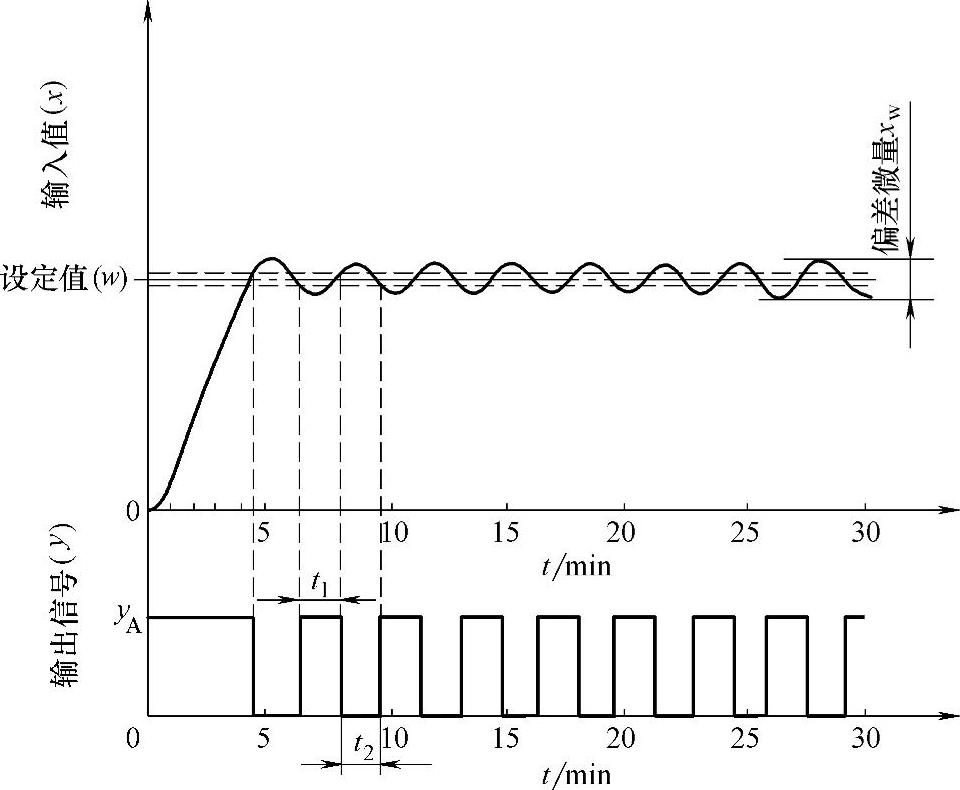
图8-39 温度调节器开关式操作
t1—通电工作时间 t2—断开时间
(1)PID调节特性 如图8-40a所示,测定的输入值x与给定值w之间存在偏差值xw。对于偏差值xw的不同调制,可获得比例P、微分D或积分I的调节特性。比例调节特性P见图8-40a,加热功率改变与偏差微量xw成正比。偏差微量xw越大,输出y使加热功率变化越大,并可使控制对象很快地到达给定值。它能较为迅速克服扰动的影响,但控制精度不高,温度波动较大。单独采用时,使加热“软”启动对塑料加工有益。
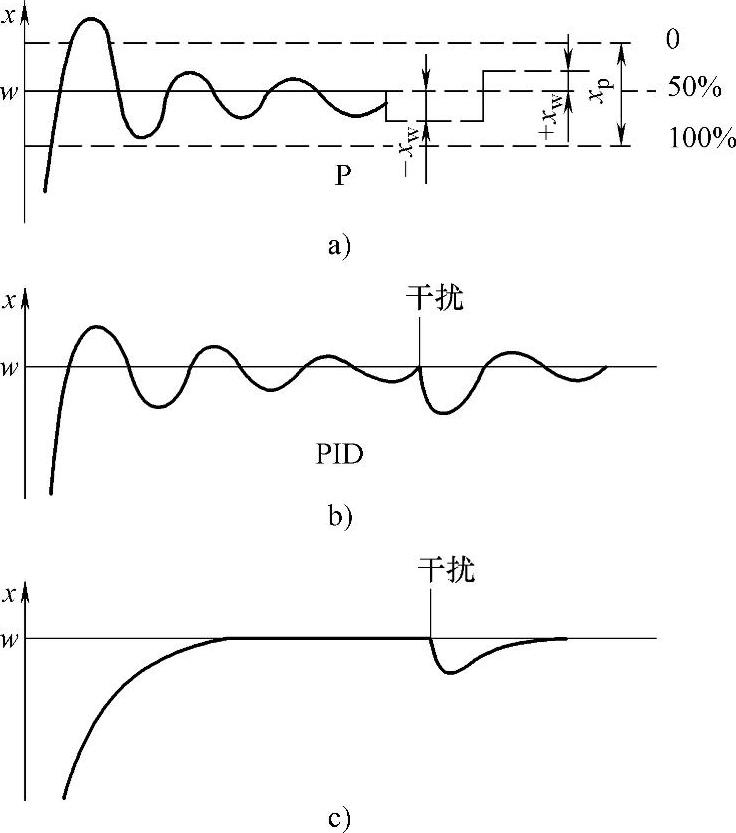
图8-40 温度调节器的特征
a)P比例调节 b)PID调节 c)自适应调节
微分D的调节特性是加热功率的改变正比于偏差微量xw对时间的微分。当温度上升太快时,加热功率减小;当温度迅速下降时,加热功率增加。因此,调节速度快,抗干扰能力强,但加热升降波动大,控制精度不高。微分D的输出只与偏差微量xw变化速度有关,而与偏差存在与否无关,即偏差固定不变时,不论其数值多大,微分D调节器都无输出,因此在热流道温度调节时不单独使用。
积分I的调节特性是加热功率改变正比于偏差微量xw对时间的积分。该调节特性能使控制温度与给定值稳定地符合,调节精度高,但是达到稳定的过程很长,也不能单独用于热流道的温度调节。
热流道系统的温度调节器使用最多的是PID比例-积分-微分作用调节特性(见图8-40b),它综合了各种调节规律的优点。比例调节是将输出功率与热电偶输入信号保持一定的比例关系;微分调节是在出现干扰时,利用偏差梯度的剧变,迅速产生较大的功率校正;积分调节使功率幅度的改变速度与偏差微量保持适当比例。PID与图8-40a所示的比例调节相比,控制对象的温度波动幅度减小,可较迅速地接近给定值。热流道系统在每次新的注射时,对流道板和喷嘴有一个温度干扰。PID调节有对一个新偏差xw迅速调节加热器的功能,避免了系统的温度有大的跳跃,有利于塑料加热,并延长了加热器的寿命。但是在PID的温度调节过程中,有控制温度超出给定值的过程,称“超调”。
(2)自适应调节特性 它可在PID综合调节的基础上,抑制在调节过程中的“超调”现象,并使得注射中干扰现象的调节也得到改善,如图8-40c所示。温度调节器从起动开始,就对测量温度进行实时监控,通过对输入值的超前响应抑制超调,有效地控制加热功率。现代注射模热流道的温度自动控制都能实现这种自适应的调节特性。要想实现这种调节特性,需将热电势的模拟信号放大后转换成数字电路的脉冲信号,经微处理单元调制。
(3)软启动功能 软启动功能是在冷态开机,或系统从一个状态转变成另一状态并且温度远低于设定温度时,控制输出加热功率由小到大,使热流道系统平缓升温至软启动的设定温度,从而减少由于电压冲击对加热元件的损坏。在图8-41所示的软启动阶段中,软启动设定温度为124℃;软启动设定时间为0~999s,通常设定为2~10min。开机时,如果控制对象温度小于100℃则进入软启动模式,如果大于100℃则直接进入自动控制状态。升温时,如果超过软启动设定时间,或温度已升至124℃,则系统由软启动进入自动控制状态。在软启动未结束时,可操作切换到手动控制或自动控制。
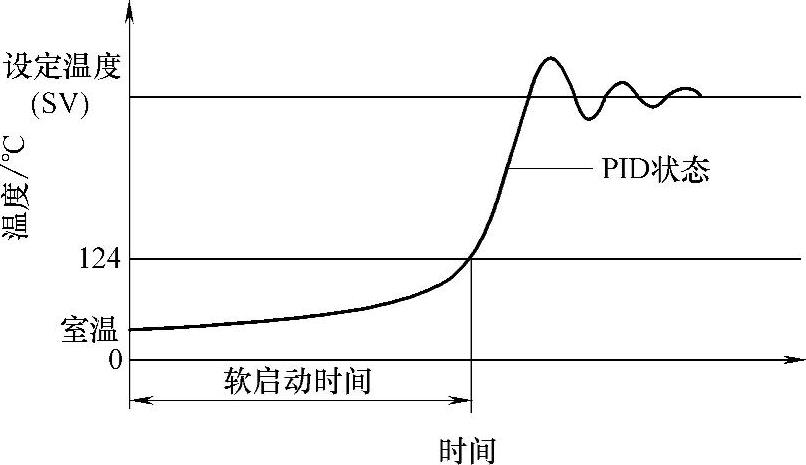
图8-41 软启动时温度调节特性
(4)加热功率的控制 热流道系统加热器的交流加热电压(见图8-42),由温度调节器供给。控制加热功率有两种方式:一种是移相触发控制;另一种是脉冲组触发控制。调节器的微处理单元有相应的算法。移相触发控制是输出某个信号,截取加热电压的正弦交流波后,传输给加热器,如图8-42a所示。脉冲组触发控制如图8-42b所示,输出的脉冲信号以接通、断开的开关方式截得半波的成组脉冲电压,再输送给加热器。
(5)自整定功能 自整定是通过调节器的微处理单元对负载进行自动测试和计算,并针对不同的负载,自动设定合适的P、I、D参数,以达到最佳控制效果。图8-43所示为自整定的温度控制过程。自整定是P、I、D参数的设置过程,在初次开机时进行。自整定结束后,即使切断电源,P、I、D参数将被自动保存。如图8-43所示,自整定在启动的低温阶段进行,整定期间是开关式的功率输出控制,温度控制值变化很大。
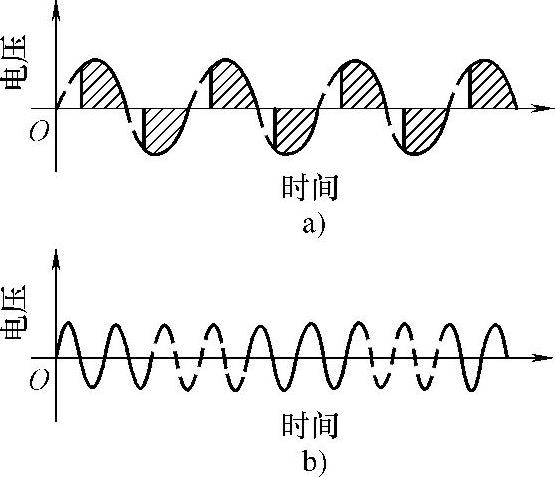
图8-42 加热器功率的控制方式
a)移相触发 b)脉冲组触发
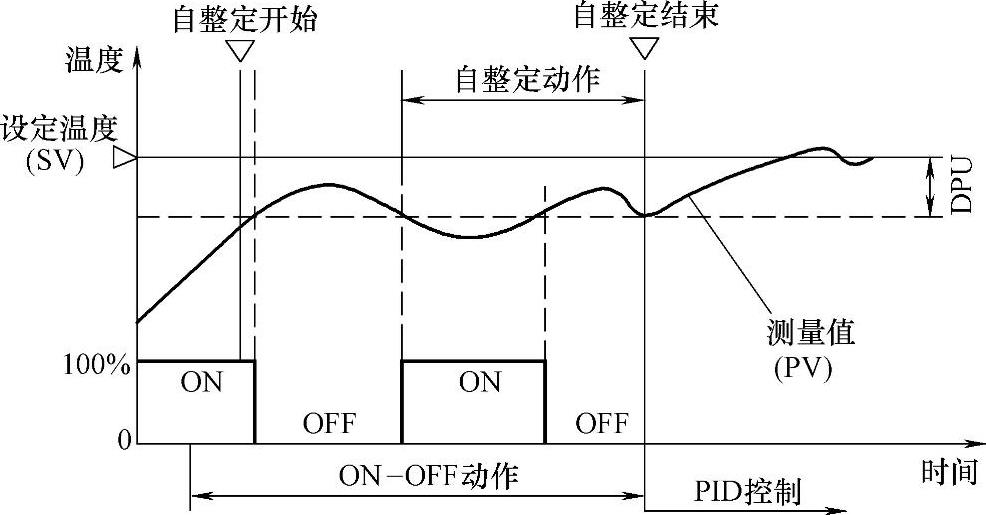
图8-43 自整定的温度控制过程
DPU—自整定的结束温度
3.PID控制算法
现代注射机的温度控制对象有机筒-喷嘴的温度控制,还有热流道系统、液压油和注射模的温度控制。注射工艺实验的注射机还会增设熔料温度、螺杆温度和料斗温度等控制。
热流道系统的流道板、喷嘴、机筒的加热和冷却存在惯性,加热期间存在干扰,要求温度控制系统的响应时间短又有良好稳定性。在早期的工业自动化原理中,给定值的偏差e是用模拟量进行比例P、积分I和微分D的调节。对调节器输出的控制量u(t)的原理表达式如下:

式中 K——比例系数;
e(t)——输入的信号偏差,其值为设定值与测量值之差;
TI——积分时间;
TD——微分时间;
u0——控制的基准量。
式中等号右侧第一项称为比例调节器。偏差e(t)一旦产生,调节器立即产生控制作用。控制量u(t)朝着减小偏差的方向变化。比例系数K决定了控制作用的强弱。比例调节器的控制量存在阶跃性的误差,会引起被控对象的振荡。
为了提高系统的稳定性,将等号右侧第一项加上第二项构成比例积分调节器。式中TI为可选定的积分时间,它通过逐次作用,减小控制量的误差,达到被控对象的稳定状态,但降低了响应速度。
式(8-19)构成了比例积分微分调节器。加入微分项以控制偏差e(t),在瞬间的微分时间TD内能提早减小偏差,减小控制量u(t)的超调,从而减少调节时间,加快系统的稳定过程。
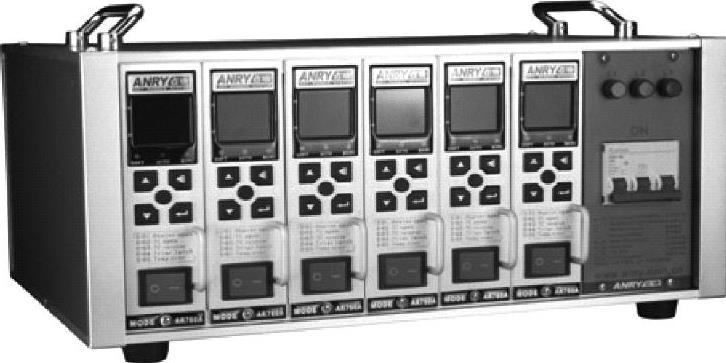
图8-44 热流道系统温度控制器
模拟量的电子线路控制器已经很少使用,现大都采用数字电子线路的控制器。这种数字控制器具有微处理器的功能。从热流道公司购置的热流道系统温度控制器如图8-44所示。热流道系统上每个加热区的加热电源、温度测量和控制都有单独的温度调节器。在温度调节器抽屉的面板上可显示温度测量值和各种参数,输入和显示温度给定值,设定报警温度和报警器,设定软启动时间等。在每个温度控制器的线路板上都有单独的集成块,或称芯片,它是为热流道温度控制专门设计的微处理器。它以可编程序控制器(Programmable Logical Controller,PLC)为核心,有CPU运算处理功能(即算术逻辑运算和程序控制功能),也有只读存储器ROM和读写存储器RAM。ROM存储系统可监控程序,不可改写。RAM可存储应用程序和数据。PID控制算法用计算机程序存储在ROM存储器中。
PID控制的最常用算法有两种,即位置控制算法和增量控制算法。数字式控制器用计算机程序进行PID控制,简便可靠,可以实现高级复杂的控制算法,还可以提供生产管理的监控接口,用程序防止生产过程中的故障和事故。
(1)PID位置控制算法 若以T为采样周期,k为采样序号,则式(8-19)的PID算法的积分和微分项不能直接准确计算,只能用数值分析方法逼近,算出控制量u(k)。这种PID位置控制的算法为

式中 KP——比例系数;
KI——积分系数, ,其中T为采样周期,TI为积分时间;
,其中T为采样周期,TI为积分时间;
KD——微分系数, ,其中TD为微分时间;
,其中TD为微分时间;
k——采样序号,k=0,1,2,…;
e(k)——第k次采样时输入的偏差。(https://www.xing528.com)
位置控制算法的优点是原理简单,易于实现,常用于执行机构的阀芯位置的控制,也用于热流道系统的温度控制器及对加热器功率用交流电压的相位角的控制。但是,每次输出的u(k)对应执行机构的先前位置,如果u(k)大,会引起执行机构位置大幅度变化,一旦出现故障,误动作的影响大。
(2)PID增量算法 如果执行机构需要的不是控制量的绝对值,而是其增量Δu(k),通过步进电动机控制对象,应该用PID增量算法,即
Δu(k)=KPΔe(k)+KIe(k)+KD[Δe(k)-Δe(k-1)] (8-21)
式中 Δe(k)——偏差值的增量,Δe(k)=e(k)-e(k-1)。
位置式算法的控制器每次输出与过去状态有关。式(8-21)中要用到过去偏差的累加值 ,容易产生较大的累积误差。而增量式的控制器只需计算增量,计算误差对控制对象的影响较小。
,容易产生较大的累积误差。而增量式的控制器只需计算增量,计算误差对控制对象的影响较小。
4.模糊自整定PID控制
注射机的热流道系统、模具和机筒等的温度控制应用模糊控制器。使用模糊控制器必须在线检测被控对象的误差和误差的变化率,按照调控法则,用模糊条件语句修改系数KP、KI和KD。让PID调节器输出优化的控制量,可得到良好的温度调节效果。模糊自整定PID控制器控制是高精度的温度自动控制方法,应用参数模糊自整定PID调节器,用于高精度的温度自动控制。
图8-45a所示为温度控制器采用PID控制方式的热流道系统的响应曲线。温度响应曲线有很大的超调量,而且系统进入稳定状态的时间也很长,测定温度与给定温度的偏差(即温控精度)为±5%。当给定的加热温度为200℃时,测定温度的误差为±10℃。早期的热流道温度控制器是进行现场调试的,当调试到超调量最少、稳定时间最短时,就可以得出一组最优的PID调节参数KP、KI和KD。这组最优的调节参数只有在该热流道系统的条件下,才能有良好的调节效果。系统受到干扰,如环境温度变化,则需要重新整定PID参数。此操作过程相当烦琐费时。早期的热流道温度控制器不能满足使用要求,因而各种智能PID温度控制器相继出现,现已普遍使用温度控制器,温度控制精度达到了±0.5%。图8-45b所示为模糊自整定PID控制方式。温度控制器现已商品化。
模糊(Fuzzy)控制器具有人工智能,能根据热流道系统输出的温度偏差e和温度偏差变化率ec(=de/dt)来决定被控对象的输入。早期的热流道温度控制器的PID调节参数KP、KI和KD是由操作人员凭经验输入,现改为用计算机程序存储在微处理器的模糊模块中。先将热流道温度误差和误差变化率分成若干区段,用来判别温度偏差e的大、中、小和零;判别温度偏差变化率ec的大、中、小和方向,用自然条件语句转化为模糊条件语句,输出优化的PID调节参数KP、KI和KD。在加热器经过升温软启动阶段后,控制线路接通模糊自整定的线路,如图8-46所示。
在模糊自整定PID控制阶段,按周期采样k=0,1,2,…,获得e(k)和ec(k),经过模糊控制器的数据处理,得到优化的PID调节参数KP(k)、KI(k)和KD(k)。自整定的温度控制过程(见图8-43)是开关式的功率输出控制,温度控制值变化大,但超调量最少,稳定过程时间短。
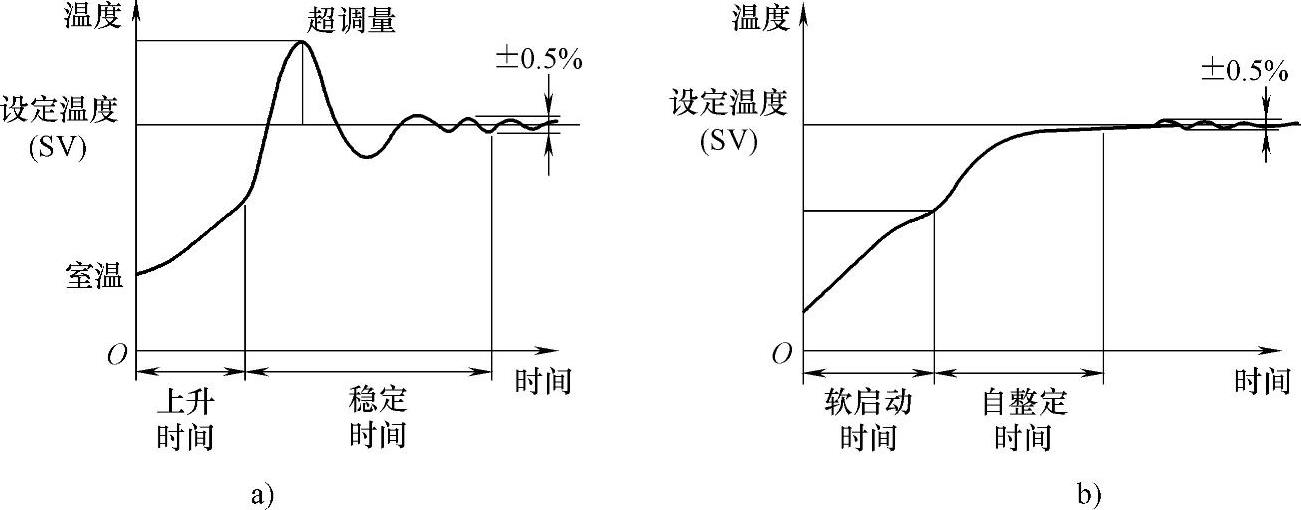
图8-45 温度控制热流道系统的响应曲线
a)PID控制方式 b)模糊自整定PID控制方式
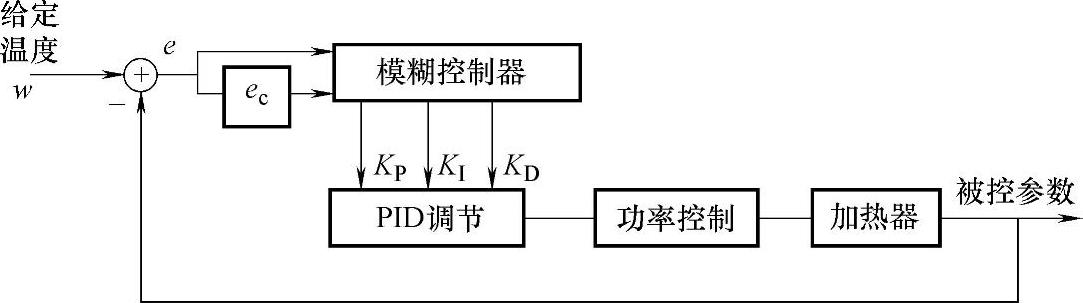
图8-46 模糊自整定PID温度控制器系统图
KP—比例系数 KI—微分系数 KD—积分系数 e—偏差 ec—变化率(=de/dt)
模糊PID控制器的编程设计原理如下:
1)当︱e︱比较小时,为使系统具有稳态性能,KP和KI应取得大一些。
①当︱ec︱较大时,KD取小值,否则可能会引起振荡。
②当︱ec︱中等或较小时,KD取较大一些的值。
2)当︱e︱中等大小时,KP应取中等大小,过大可能会引起超调。KI也应取中等大小的值,过大会引起积分饱和,产生超调。
3)当︱e︱比较大时,跟踪性能比较重要,KP应取较大值。为避免积分饱和,KI应取较小的值。
图8-47所示为微处理器控制系统的基本框图。若功率控制需要,控制器输出量u便用D/A转换器,将数字量转成模拟量。反馈信号要用采样器将其断续化,然后再用A/D转换器数字化。相对于系统控制参量的变化,采样的频率应足以保证检测量的准确。
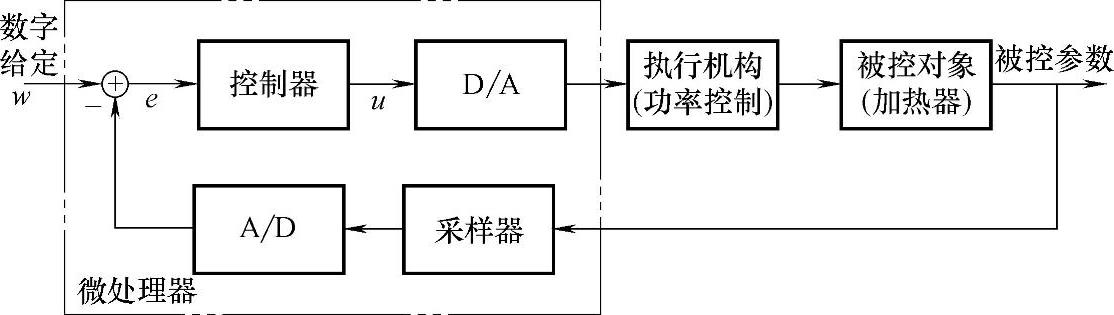
图8-47 微处理器控制系统的基本框图
热流道系统的温度控制区达到20个以上的注射模塑越来越多。如果一个热流道温度控制区用一个温度调节器(见图8-44)单路控制,势必会使温控器过于庞大,因此出现了一个调节器控制两个加热区的设计。现已经有一卡双点温控器的商品供应。图8-48所示的热流道系统的温度控制柜中采用了多点和单屏幕的工业计算机。它具有高速的微处理器,可进行高频率的温度测量,用先进的PID控制算法,可达到±0.5%以上的温控精度。它能提供稳定可靠的加热功率,又有可选择的软启动功能。它有大尺寸液晶显示和触摸屏,对各点的温度数据、电流及功率可提供显示报告、记忆统计和报警功能。

图8-48 热流道系统的温度控制柜
5.温度控制器简介
温度控制器也称主控箱,如图8-44所示。它根据热流道系统的温度控制区数目组装。每个温度的检测与加热区有个温度调节器,因此有型号,如1、3、4、6、8、10和12,其他2、5、7、9和11也可按需组装。每个温度调节器通过导槽和接插件与主控箱连接并定位。每个温度调节器都有独立的开关,除可报警外,还有一套完整的温度控制系统。
(1)调节器的控制面板操作 图8-49所示为调节器的控制面板。热流道温度控制器在不断
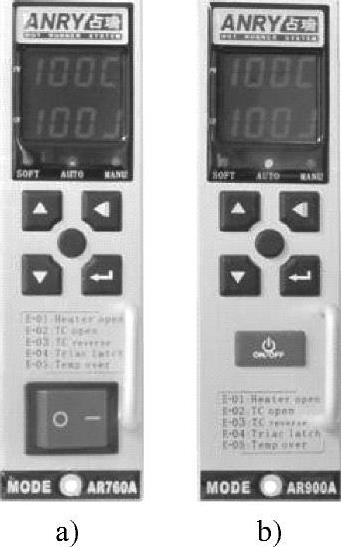
图8-49 调节器的控制面板
a)按钮开关调节器 b)电子开关调节器
地改进中,现已去除了自整定的参数设置,实现了自动化的调整,具有操作简便的特点且智能化,增加了加热功率、电流显示以及热电偶分度号选调和显示,还具有℃/℉温度单位选调和显示,并完善了报警的功能。
1)开机。
①先接通温度控制器的总电源,数码管显示热电偶的分度号、温度单位、温控量程。
②接通加热区调节器的电源开关,首先设定加热的温度,在SV设定显示屏上显示后确认。设定的操作步骤见热流道温度控制箱的用户手册。
③调节器自动进入软启动和自动控制状态。在升温阶段启动报警参数。
2)设定信号输入类型。制造测温热电偶的双金属和补偿导线为不同材料(或者使用热电阻,材料也不同),有十几种材料的型号供选用。设定的热电偶或热电阻型号如果与实际材料不符,会与PV显示屏上的实测温度相差几十度,甚至误差更大。出厂设定的热电偶分度号是J型。
3)软启动时间SFT设定。按设计要求,流道板加热到注射温度需20min左右,因此软启动时间需设定到600s(约10min)。先加热到124℃,再由自动控制加热。喷嘴升温到给定温度是2~5min,需设定软启动时间120s左右。调节器的出厂设定软启动时间是4min,在240s内升温到124℃。因此,应按各加热区需要,各个调节器单独设定。
4)设定报警温度AL1和AL2。
①上偏差报警温度AL1也称超温报警,是对给定加热温度设定的上偏差值。如果给定温度为200℃,AL1输入20℃,则上限报警温度为220℃。当温度测量值大于或等于设定值加上偏差值时,蜂鸣器报警,屏幕上显示超温报警温度与实测温度的跳跃,负载输出电压线性下降,直至报警解除。AL1的出厂设定值为+30℃,适用于无定形塑料,一般可默认。对于结晶型的塑料,可改设为+20℃或+10℃。
②下偏差报警温度AL2又称低温报警,是对给定加热温度设定的下偏差值。如果给定温度为200℃,AL2输入10℃,则下限报警温度为190℃。当温度测量小于或等于设定值减去偏差值时,蜂鸣器报警,PV显示屏上呈现低温报警温度与实测温度的跳跃,负载电压下降,直至报警解除。AL2的出厂设定值是-30℃,适用于无定形塑料。对于结晶型的塑料,可改设为-20℃或-10℃。
5)手动控制的功率百分比AN的设定。AN设定只在手动控制状态下有效,在温度传感器损坏时使用。切换为手动时,直接设置输出量的百分比,用小数表示,范围0%~1.0%,出厂值0%,以目测此注射点的塑料熔体注射流动状态为设定依据。
温度调节器通常启动方式是开机后自动进入软启动,能自动切换到自动调节,也可以等软启动完成后,按手动键进入手动控制。软启动、手动和自动均有按键,并有指示灯。手动也称为开环,自动也称为闭环。
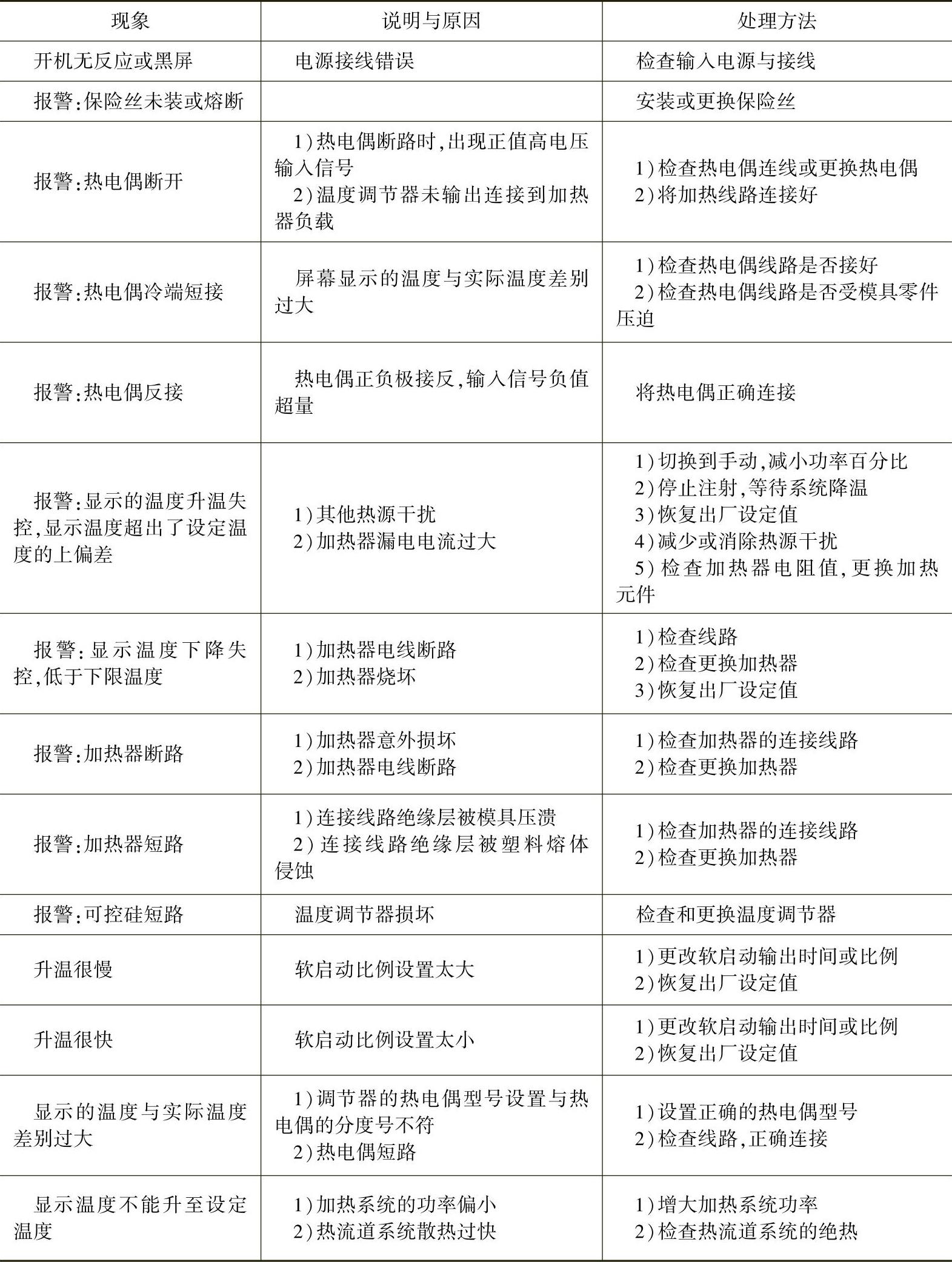
(2)常见异常现象的处理 在热流道注射模工作时,温度控制系统的某个加热区及调节器出现异常现象会有报警,并在显示屏上呈现异常温度。热流道系统温度调节器的异常现象及处理见表8-10。
表8-10 热流道系统温度调节器的异常现象及处理
必须认识到,大型塑件和一模多腔的注射模有较多的喷嘴,在流道板上有较多的加热区。当有十几个温度调节器时,各调节器上显示的测量温度对于真实温度存在误差,SV屏的给定温度对于所需正确温度存在偏差。SV显示温度一致,并不说明热流道系统各部位温度一致,也并不是各部位所需的合理温度值。有时会使个别或一些注射点的注射失败,成型的注塑件质量达不到要求。
因此,在塑料熔体试射的最后阶段,要以各个浇口处塑料的流动性和注射质量来判断温度调节的结果,如以浇口的流涎和拉丝、浇口料头和浇口附近的注射质量来判别熔体流动性,调节相应注射点及加热区的给定温度。这项温度调节系统的误差修正工作,需要熟悉热流道系统的设计,并熟悉注射塑料熔体的流动性,需要丰富的实际经验。
温度调节系统误差的原因有两个方面:一方面是温度调节系统的设计和制造的误差,如热电偶参比端的温度补偿有误差,热电偶的位置和安装质量不佳,加热器质量及其安装质量优劣,加热器功率密度是否均匀,电网电压和环境温度变化,都会使实际温度分布不均衡。另一方面是热流道的浇注系统设计和制造误差,如流道和浇口中流动剪切速率变化使熔体的黏度变化,浇口的几何尺寸和孔径的误差、喷嘴浇口区温度等因素也会造成剪切速率和熔体黏度的变化,改变熔体的流动性。流道板各位置和各个喷嘴的绝热条件不同,热损耗有多有少,使实际温度有高低,各注射点的熔体流动性有差异。
因此,应根据各注射点和加热区的温度对注射熔体流动性的表现,修正各调节器的设定温度值,补偿测定温度和实际温度的误差。
生产中对流道板进行测温调控是一种常用方法。流道板在电热器和热电偶安装后升温加热,热电偶对流道板各注射点的温度及各分流道输出口的温度进行测试。它们将影响各多喷嘴的加热温度。因此,需要调整流道板测试热电偶的测温位置,控制两注射点的温差在5℃之内。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。