



1.STARTER软件概述
STARTER软件用于西门子传动装置的现场调试。能够实现在线监控、修改装置参数、故障检测和复位以及跟踪记录等强大的调试功能。
2.SINAMICSS120AC/AC单轴驱动器概述
SINAMICS S120 AC/AC单轴驱动器是西门子公司推出的新一代交流驱动产品—集整流和逆变于一体的新型驱动器,既能实现通常的U/f、矢量控制,又能实现高准确度、高性能的伺服控制功能。它不仅能控制普通的三相异步电动机,还能控制异步和同步伺服电动机、扭矩电动机及直线电动机。其强大的定位功能可以实现进给轴的绝对、相对定位。
SINAMICS S120产品包括用于共直流母线的DC/AC逆变器和用于单轴的AC/AC变频器。共直流母线的DC/AC逆变器通常又称为SINAMICSS120多轴驱动器,其结构形式为电源模块和电动机模块分开,一个电源模块将三相交流电整流成540V或600V的直流电,将电动机模块(一个或多个)都连接到该直流母线上,特别适用于多轴控制,尤其是造纸、包装、纺织、印刷、钢铁等行业。其优点是各电动机轴之间的能量共享,接线方便、简单。单轴控制的AC/AC变频器,通常又称为SINAMICSS120单轴交流驱动器,其结构形式为电源模块和电动机模块集在一起,特别适用于单轴的速度和定位控制。
本部分只介绍SINAMICS S120单轴交流驱动器。SINAMICS S120 AC/AC单轴驱动器由两部分组成:控制单元和功率模块。具体如下:
(1)控制单元有三种形式:CU310DP、CU310 PN和CUA31
CU310DP是驱动器通过PROFIBUS-DP与上位的控制器相连。
CU310PN是驱动器通过PROFINET与上位的控制器相连。
CUA31是控制单元的适配器,通过Drive-CLiQ与CU320或Simotion D相连。
(2)功率模块有模块型和装机装柜型两种形式
模块型:其功率范围从0.12~90kW,其进线电压有单相(200~240V)及三相(380~480V)两种规格。
装机装柜型:其功率范围从110~250kW,其进线电压为三相(380~480V)。
3.用S7-300控制SINAMICSS120
以下用一个例子介绍使用现场总线控制西门子伺服系统SINAMICS S120。
【例11-10】某设备上有一套CU310DP伺服驱动系统,要求:对伺服进行调速,请编写程序。
【解】
(1)软硬件配置
①1套STEP 7 V5.5 SP4。
②1套STARTER 4.4(或者SCOUT)。
③1套CU310DP伺服系统。
④1台CPU314C-2DP。
⑤1根PROFIBUS屏蔽双绞线。
⑥1块CP5611卡。
系统的硬件配置如图11-36所示,图中的X22口为RS-232C母头,是SINAMICS S120与计算机或者PLC通信的接口。

图11-36 硬件配置图
(2)伺服系统参数的设置
①设置伺服驱动器的站地址。本例伺服系统的站地址设置为3。伺服驱动器上有一排拨钮用于设置地址,每个拨钮对应一个“8-4-2-1”码的数据,所有的拨钮处于“ON”位置时,对应的数据之和就是站地址。拨钮示意图如图11-37所示,拨钮1和2处于“ON”位置,所以对应的数据为1和2;而拨钮3、拨钮4、拨钮5和拨钮6处于“OFF”位置,所对应的数据为0,站地址为1+2+0+0+0+0+0=3。这个设置方法与MM440变频器的站地址设置是一样的,因为实际上SINAMICSS120也是变频器。
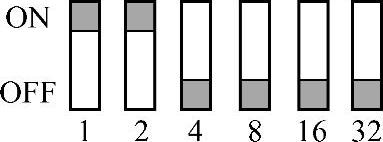
图11-37 拨钮示意图
【关键点】图11-37设置的站地址3,必须和STEP7软件中硬件组态的地址保持一致,否则不能通信。此外,设置完成后必须断电,设置的地址才能起作用。
②打开STARTER软件,新建项目。在打开STARTER项目前,计算机中要首先安装STARTER软件,此软件不需要授权,可直接从西门子的网站上下载,若使用SCOUT则需要购买授权。打开STARTER软件,如图11-38所示,再单击工具栏上的“新建”按钮,弹出如图11-39所示的界面,将项目命名为“SERVER2”,最后单击“OK”按钮。
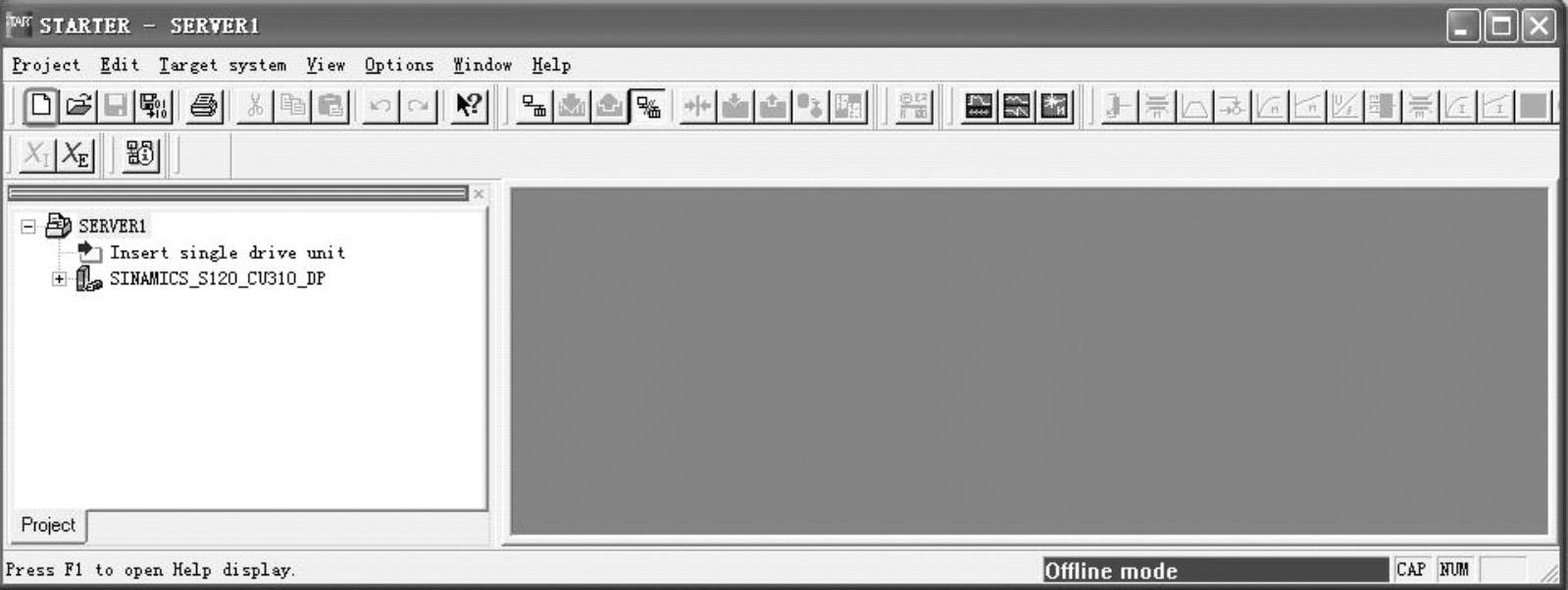
图11-38 新建项目
③设置PC与SINAMICS S120通信的路径。先选中“SERVER2”,再在菜单中单击“Options”→“Set PG/PCInterface”,弹出“Set PG/PCInterface”界面,选中“CP5611(PROFIBUS)”选项,最后单击“OK”按钮,如图11-40所示。
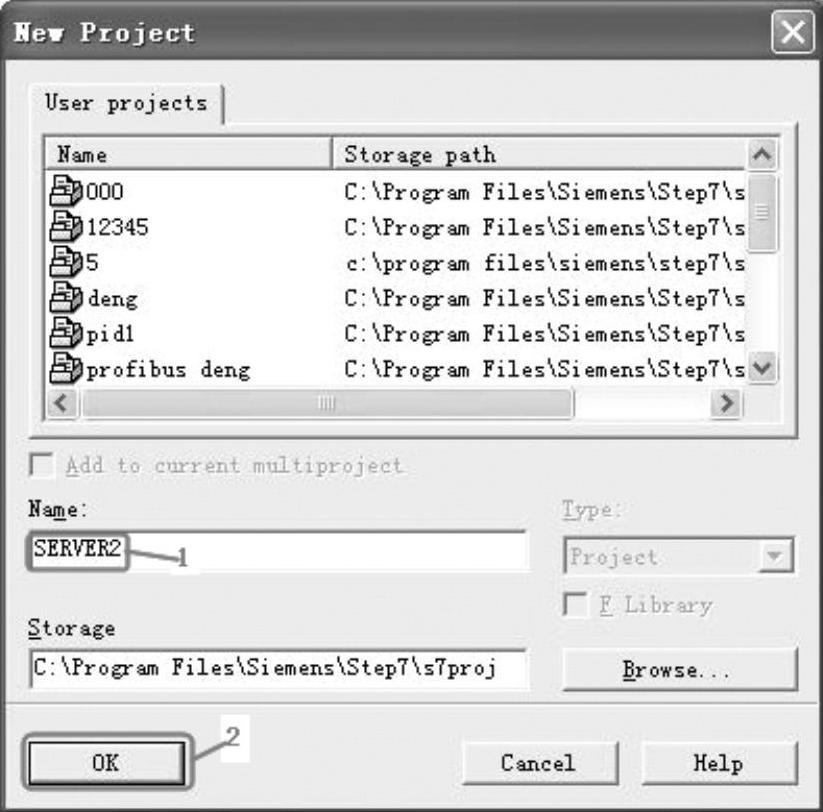
图11-39 项目命名
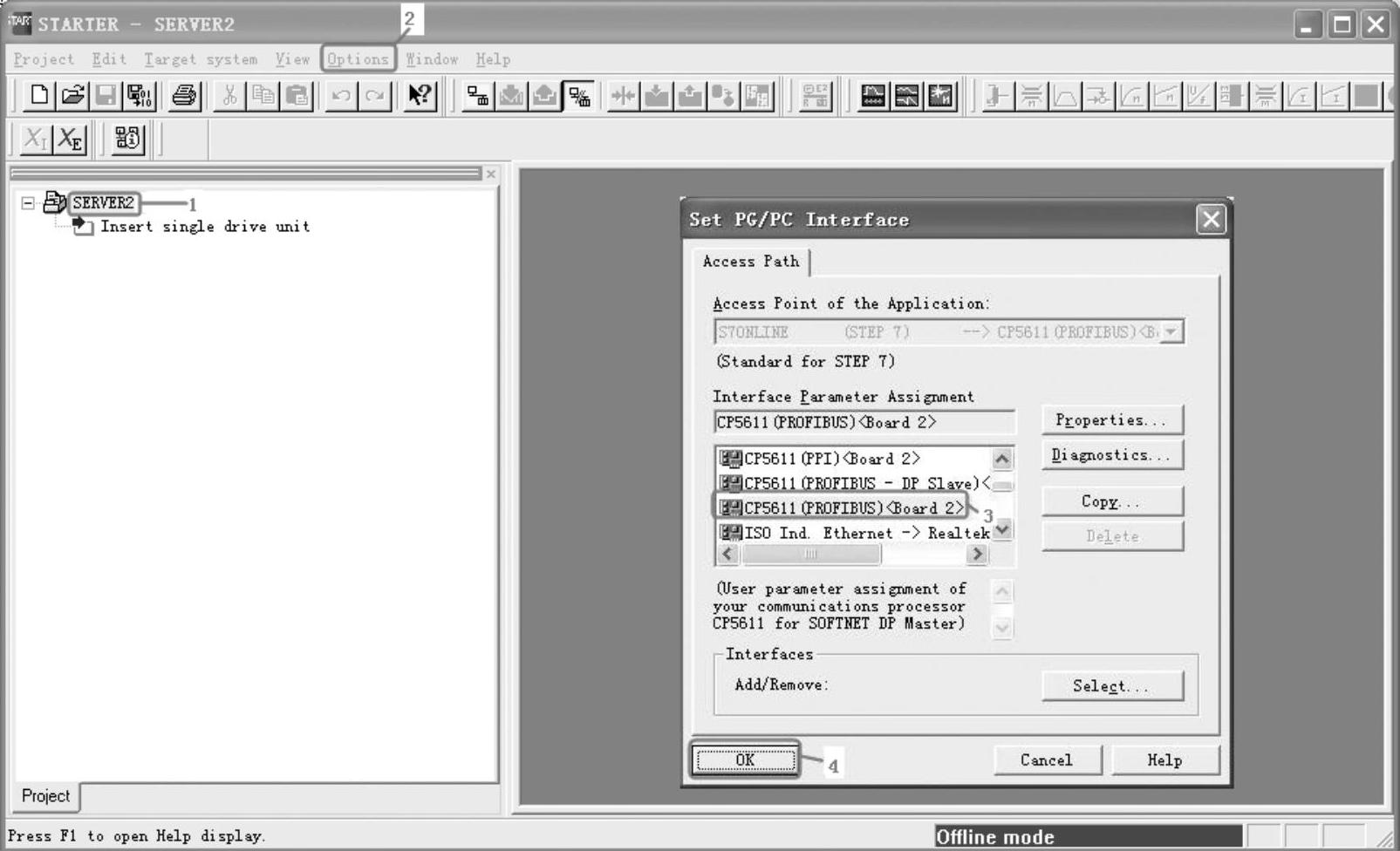
图11-40 设置PC与SINAMICS S120通信的路径
④将PG(编程器)与SINAMICS S120连接起来。先单击工具栏中的“connect to target system”(连接)按钮 ,再单击“Yes”按钮,STARTER自动寻找可连线的目标,如图11-41所示。当STARTER找到目标时弹出如图11-42所示的界面,选中找到的目标(其地址为3),该目标就是要连接的SINAMICS S120,再单击“Accept”(接受)按钮。
,再单击“Yes”按钮,STARTER自动寻找可连线的目标,如图11-41所示。当STARTER找到目标时弹出如图11-42所示的界面,选中找到的目标(其地址为3),该目标就是要连接的SINAMICS S120,再单击“Accept”(接受)按钮。
⑤配置驱动器系统。驱动器系统参数的配置可以手动配置,也可以自动配置。手动配置较麻烦,因此推荐用自动配置。如图11-43所示,当将PG与SINAMICSS120连接起来后,可以看到“3”处的字是“Online mode”(在线模式),选中并双击“Automatic configu-ration”(自动配置),再单击“Load to PG”(上载到编程器),弹出上载状态界面,如图11-44所示。当上载结束后,伺服系统的参数自动上传到编程器(PG)中。
⑥设置通信报文类型。先选中“PROFIBUS”,再选中“PROFIBUS message frame”选项卡,在“Message frame type”(通信报文类型),选定“Standard telegram 1”(通信报文1),如图11-45所示。
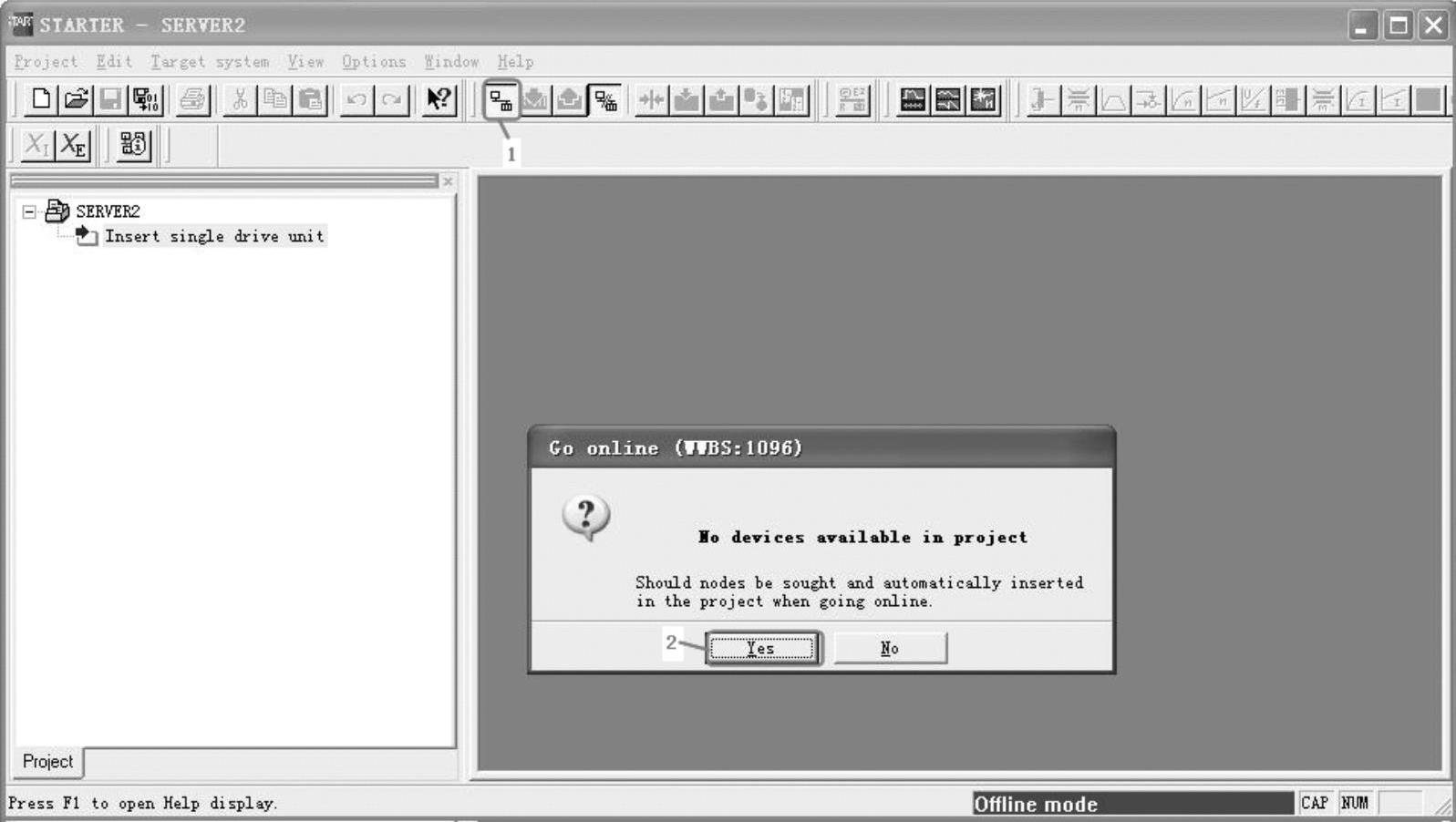
图11-41 将PC(编程器)与SINAMICS S120连接起来(1)(https://www.xing528.com)
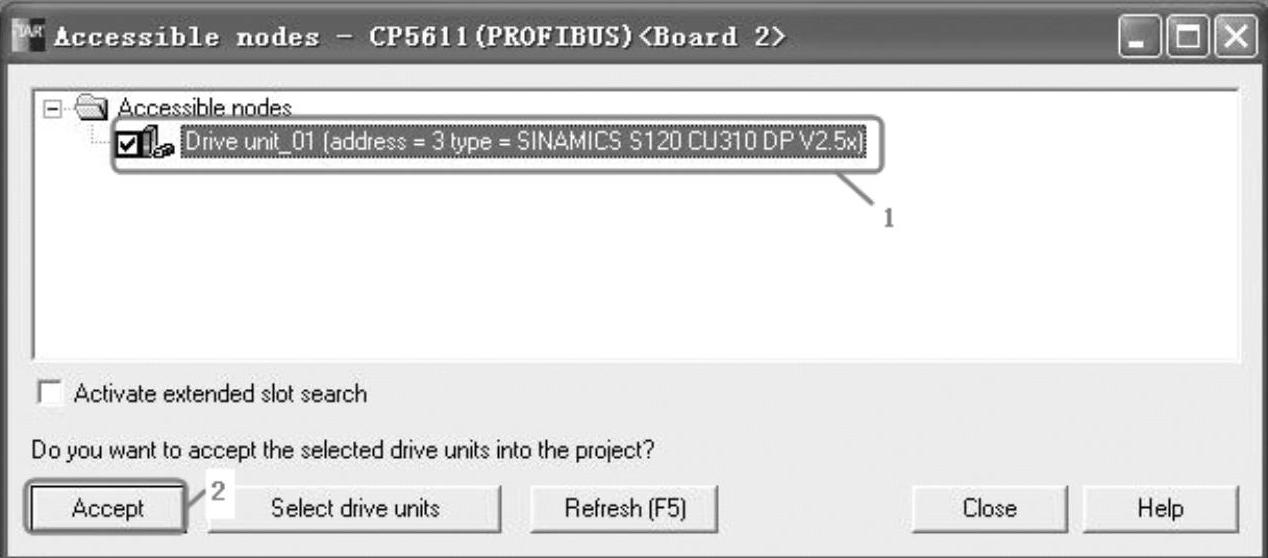
图11-42 将PC(编程器)与SINAMICS S120连接起来(2)
⑦将RAM的数据复制到ROM中。先选中“Drive_unit_01”,再单击“Copy RAM to ROM”(将RAM的数据复制到ROM)按钮 ,如图11-46所示。当数据复制完成后,再单击“Disconnect from target system”(离线)按钮
,如图11-46所示。当数据复制完成后,再单击“Disconnect from target system”(离线)按钮 ,这样PG和SINAMICS S120通信连接断开。断电后,将两者的通信电缆拔下,再将S7-300的DP口与SINAMICS S120的X22口用屏蔽双绞线(含两只网络连接器)相连。
,这样PG和SINAMICS S120通信连接断开。断电后,将两者的通信电缆拔下,再将S7-300的DP口与SINAMICS S120的X22口用屏蔽双绞线(含两只网络连接器)相连。
【关键点】图11-46中的通信报文设置与S7-300 PLC中的报文设置要一致,否则通信不能成功。此外,必须将RAM的数据复制到ROM中,否则设置的报文就不起作用。
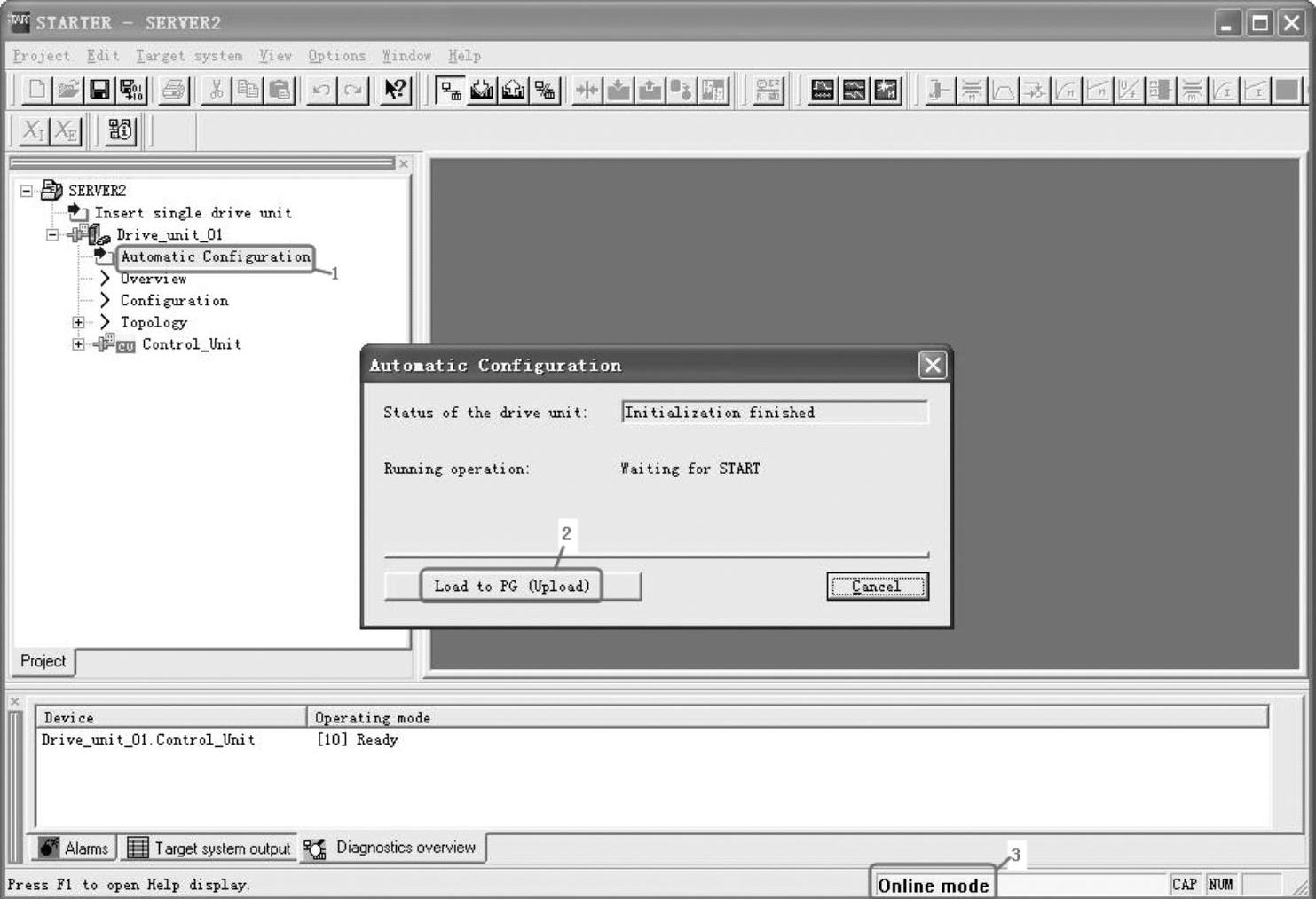
图11-43 自动配置驱动器系统
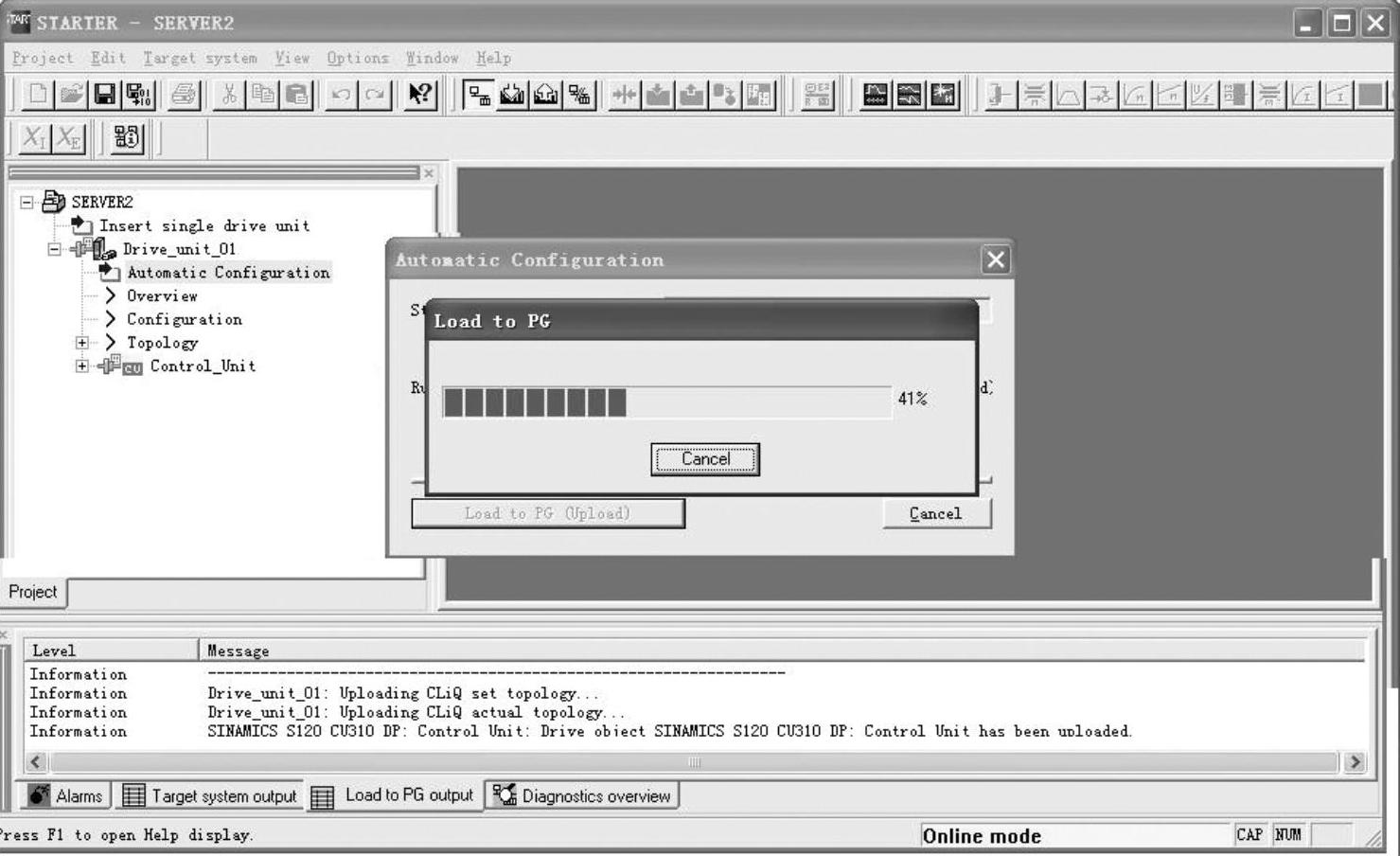
图11-44 上载状态
(3)S7-300PLC的硬件组态
①新建项目,并进行硬件组态。新建项目,命名为“314C-CU310-01”,如图11-47所示。
②将SINAMICS S120挂到PROFIBUS总线上。将界面切换到硬件组态上,先选中“1”处,再双击“SINAMICSS”,如图11-48所示,SINAMICS S120挂到PROFIBUS总线上。
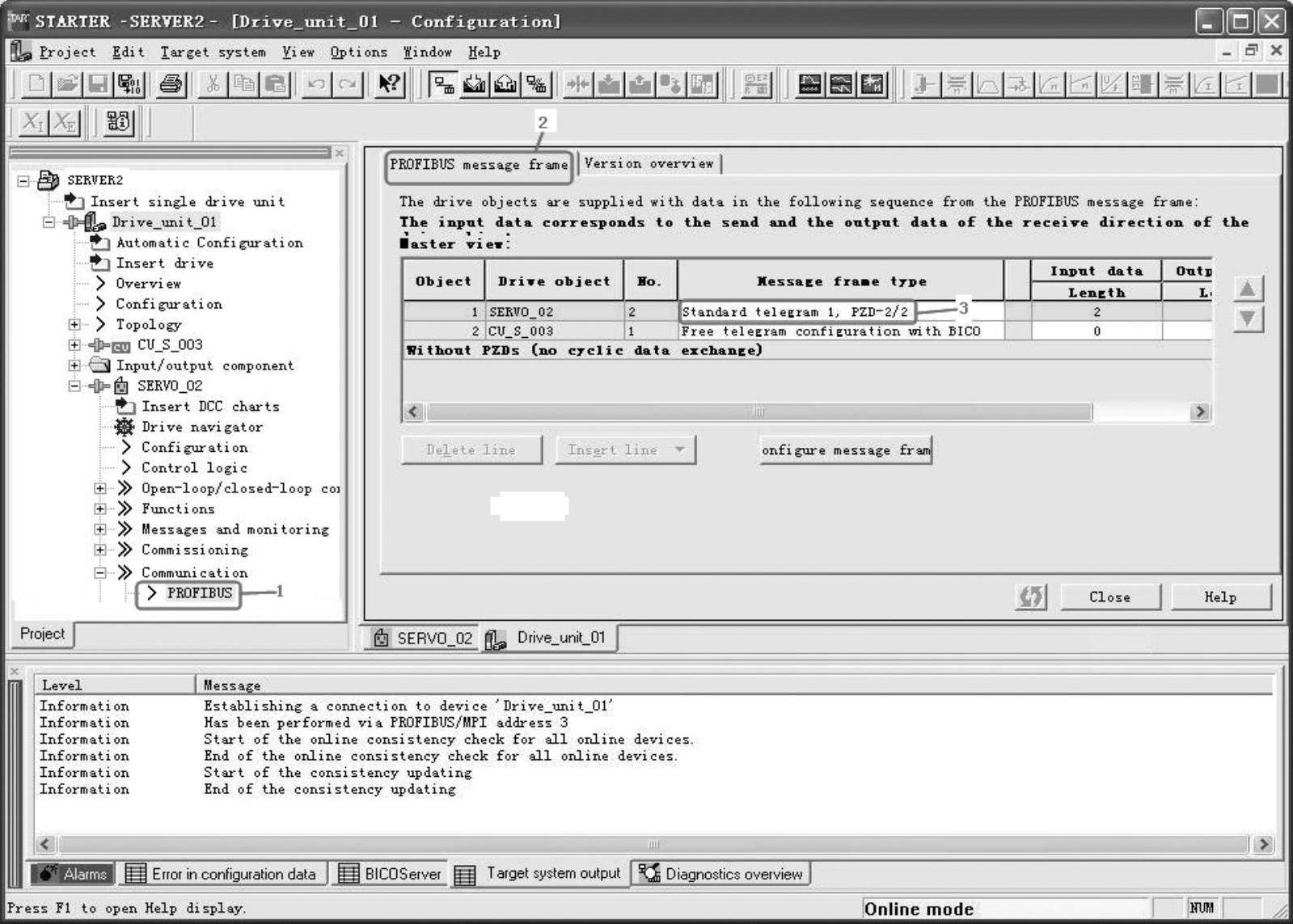
图11-45 设置通信报文类型
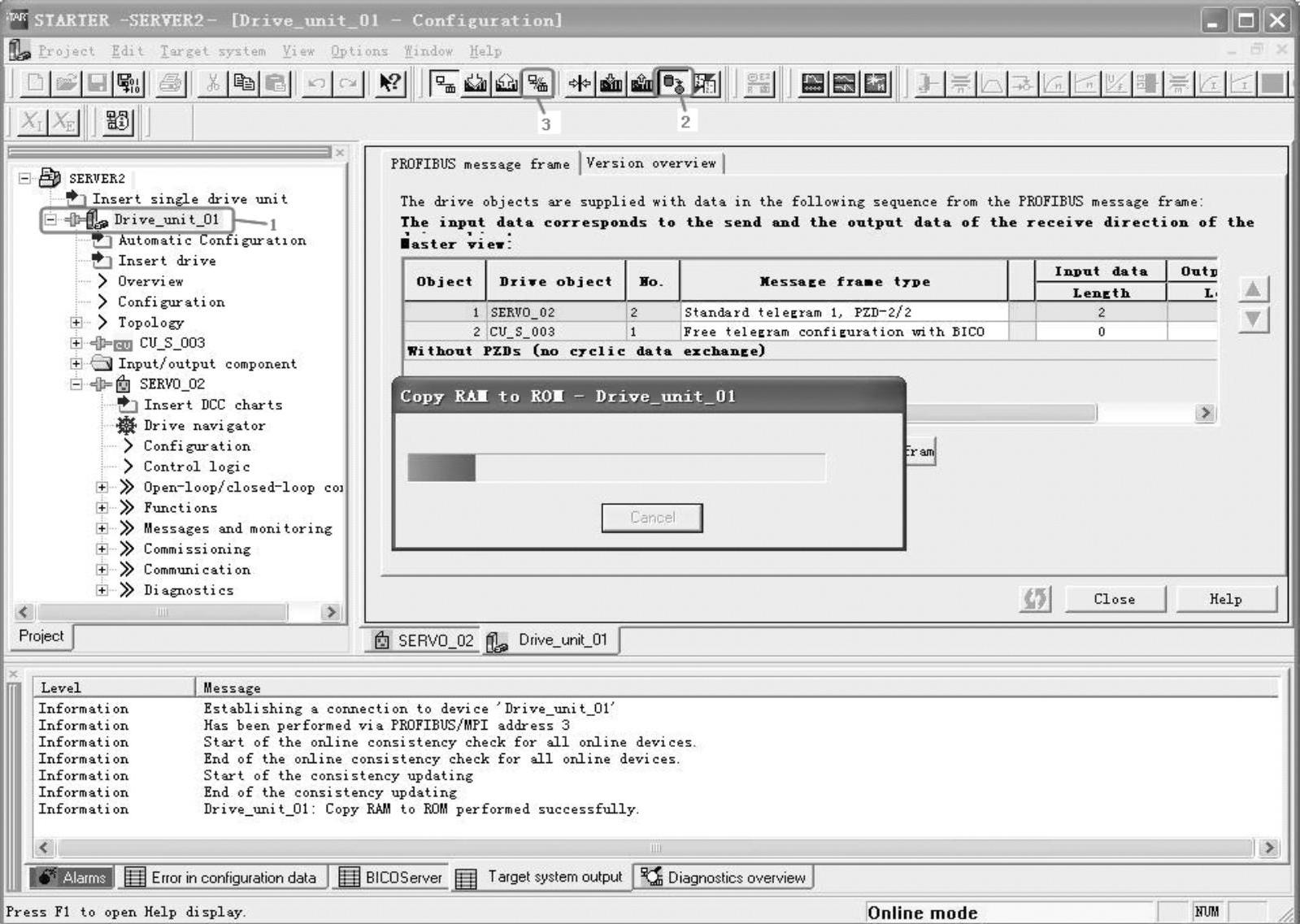
图11-46 将RAM的数据复制到ROM中
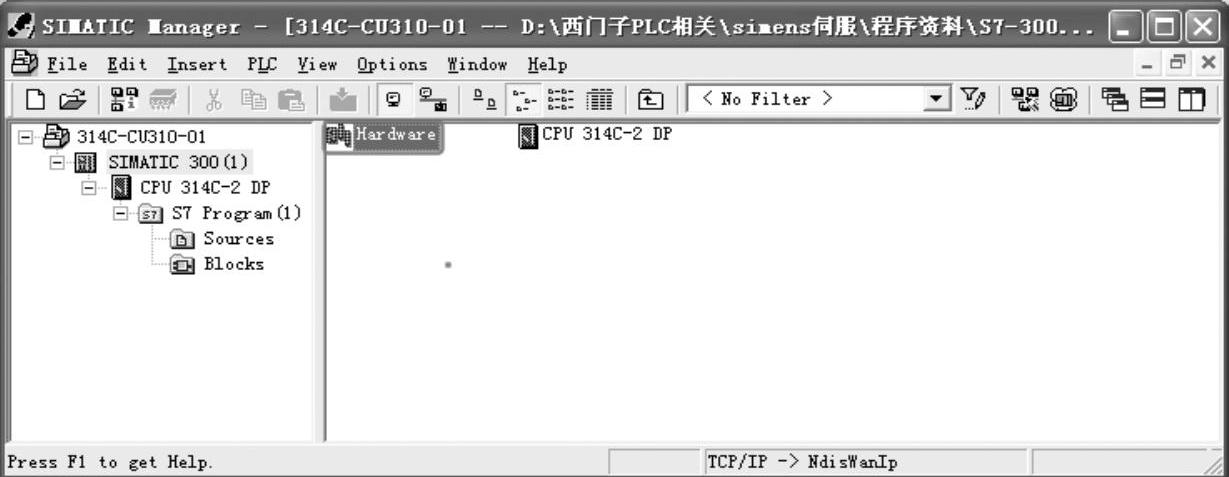
图11-47 新建项目
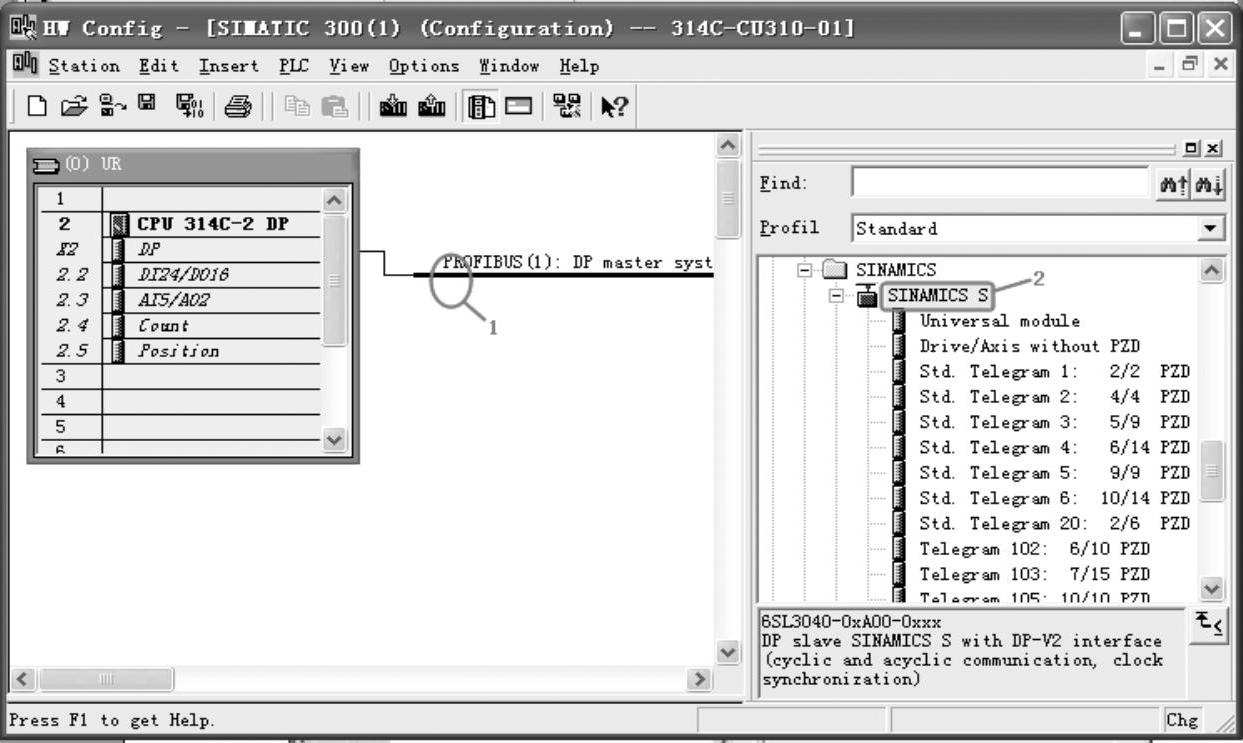
图11-48 将SINAMICS S120挂到PROFIBUS总线上
③设置SINAMICS S120的站地址。先选中PROFIBUS网络,再设置SINAMICS S120的站地址为“3”。注意,这个地址与用拨码开关设置的SINAMICS S120的地址要一致,最后单击“OK”按钮,如图11-49所示。
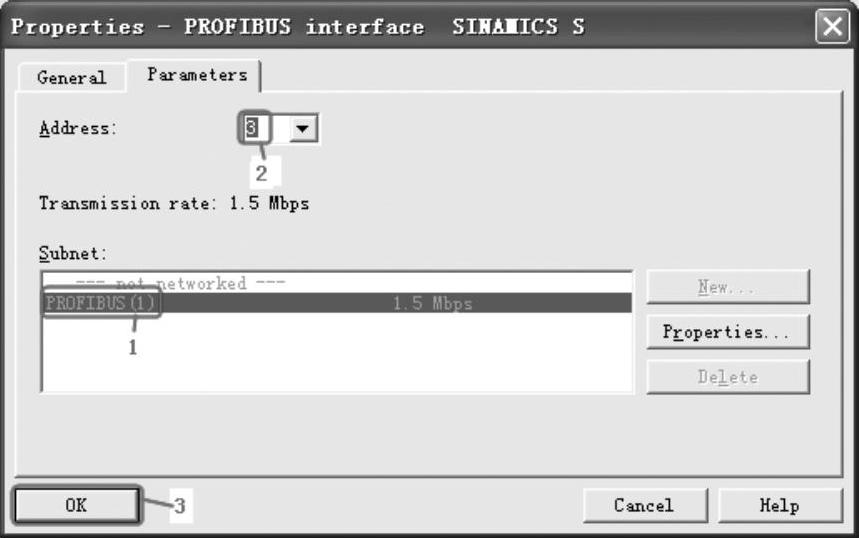
图11-49 设置SINAMICS S120站地址
④设置SINAMICS S120的报文格式。先选中SINAMICS S120,再双击“Std.Telegam1:2/2PZD”(报文1),如图11-50所示,再保存和编译硬件组态。注意,此处的报文格式要与图11-45中的“3”处一致。
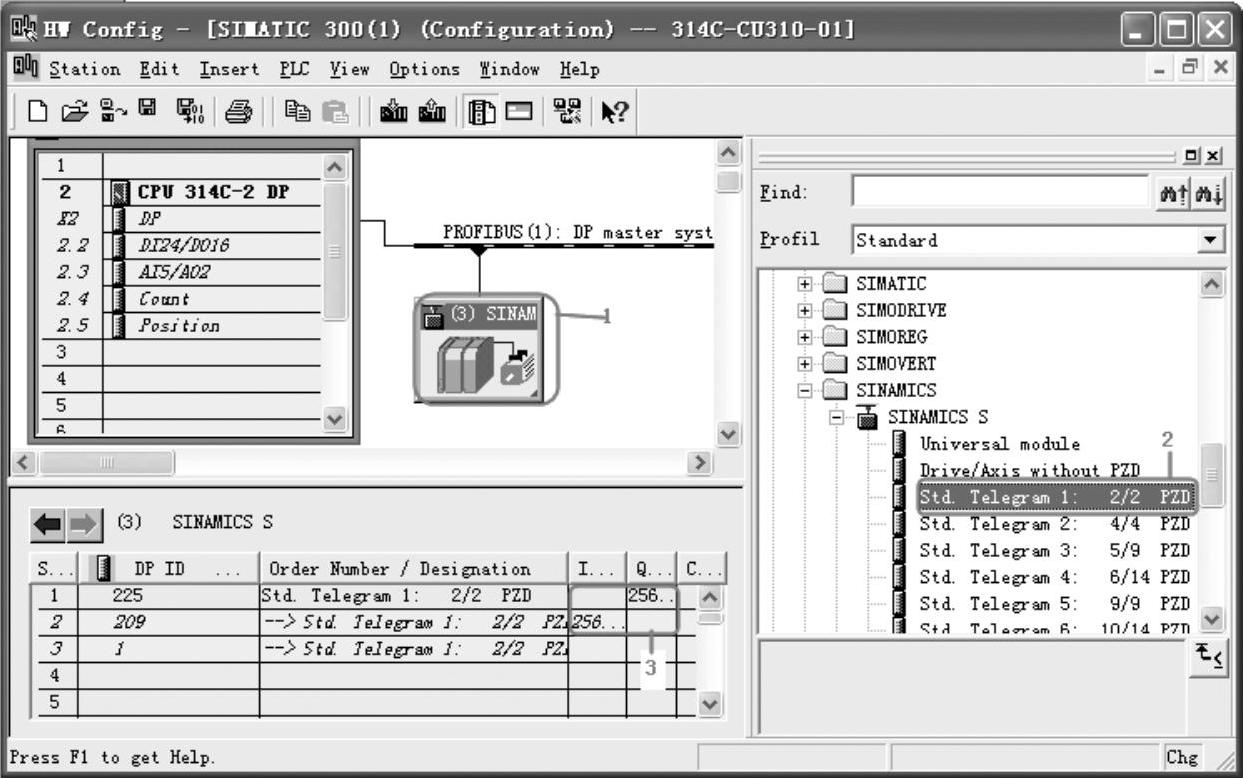
图11-50 设置SINAMICS S120的报文格式
(4)编写程序
①插入数据块DB2和参数表VAT_1。选中块OB1,插入数据块DB2和参数表VAT_1,如图11-51所示。
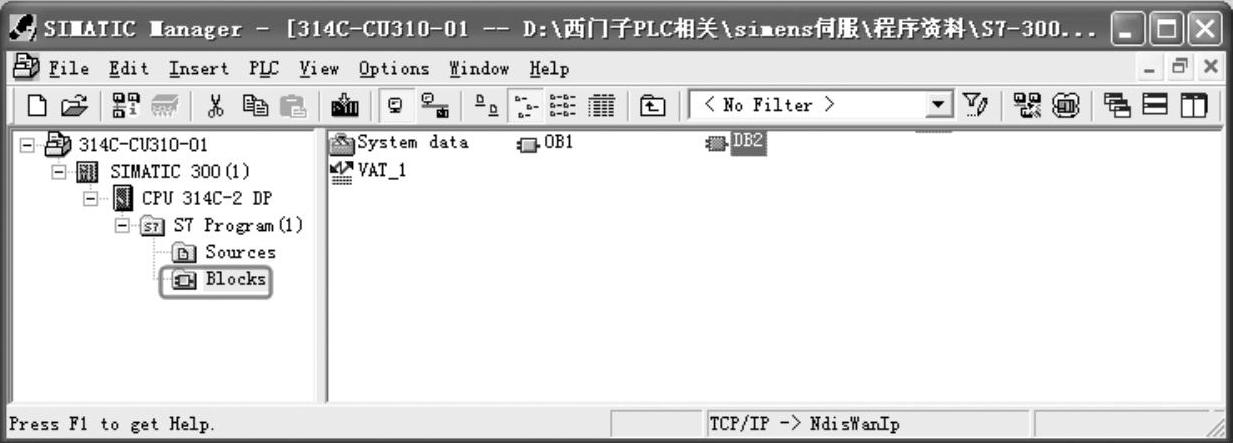
图11-51 插入数据块DB2和参数表VAT_1
②在DB2中创建数组。打开数据块DB2,并在DB2中创建数组ARRAY[1..5],如图11-52所示。用同样的方法创建数据块DB1,并在DB1中创建数组ARRAY[1..5]。
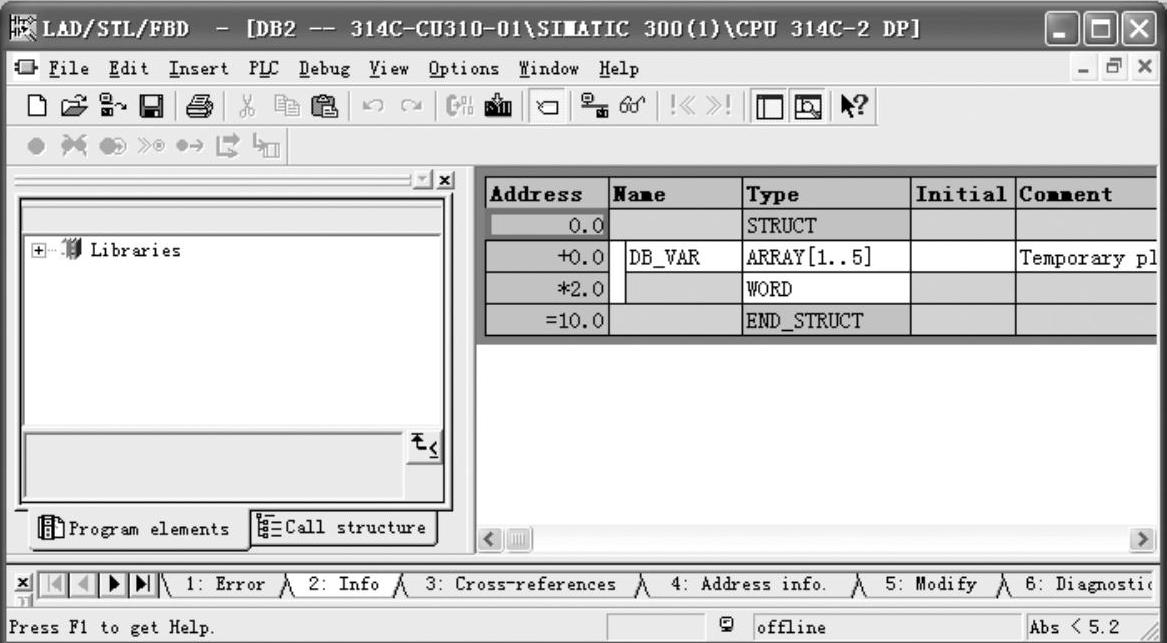
图11-52 创建数组
③参数表赋值。打开参数表,输入如图11-53所示的参数和参数值。注意,“W#16#047E”的含义和“W#16#1000”的含义可参考11.5.2,在此不作赘述。而M1.0是起动的开关,图中是“false”(假),当参数表处于监控状态时,将M1.0修改为“true”(真),则伺服电动机以一定的速度运行。
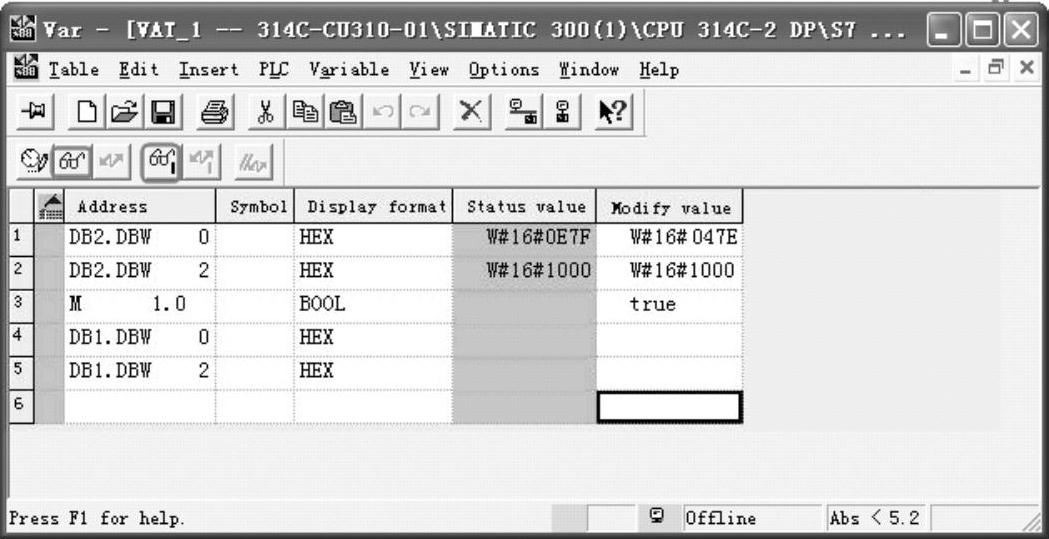
图11-53 参数表赋值
④编写程序。按照如图11-54编写程序,注意M1.0和M1.1是脉冲时才有效。
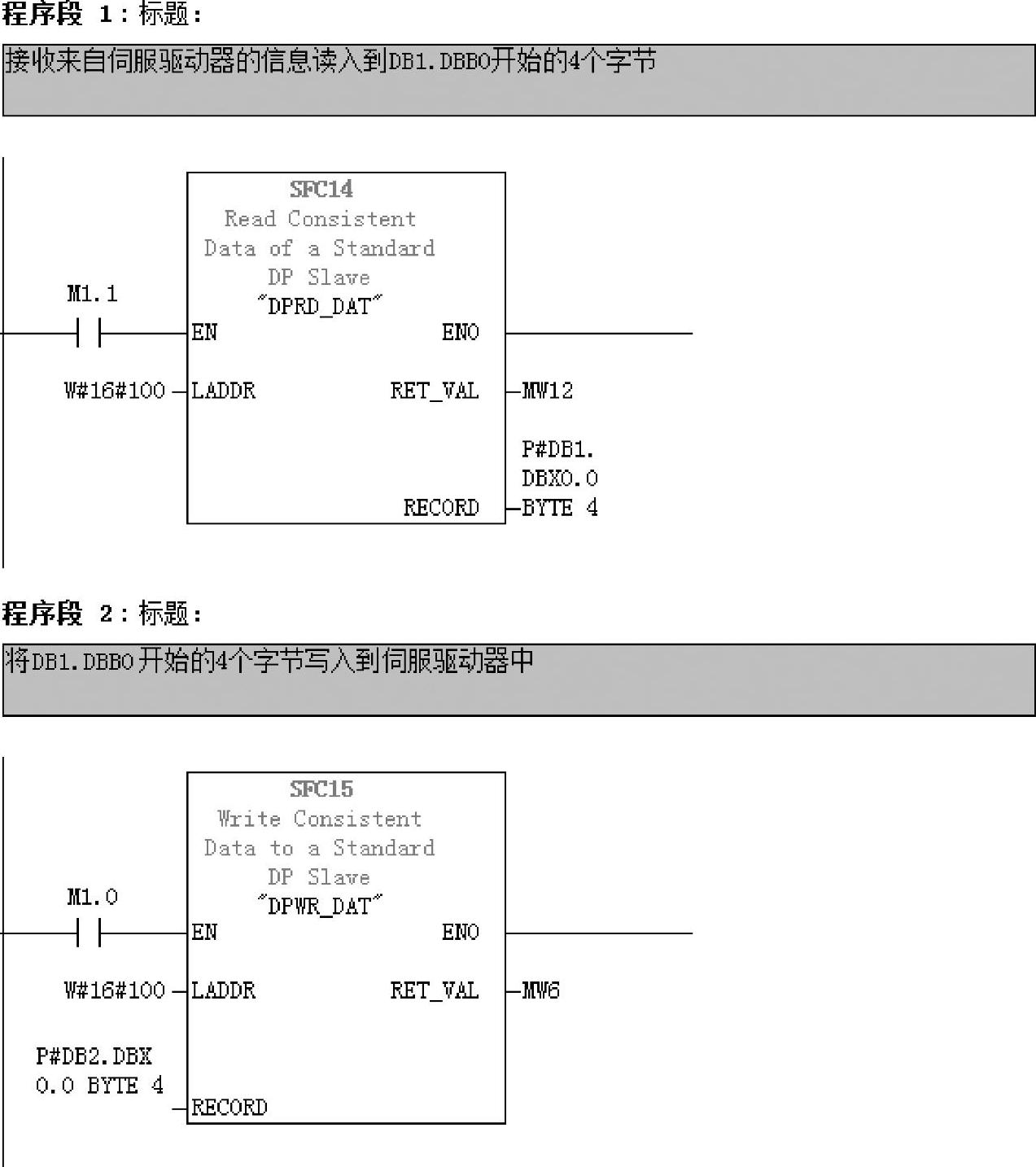
图11-54 OB1中的程序
(5)下载和调试
将编译后的硬件、程序、数据块和参数表全部下载到CPU 314C-2DP中,注意不能缺少其中任何一个。单击参数表中的“参数监控”按钮 ,使参数表处于监控状态,再将M1.0的参数false改为true,最后单击“更新参数”按钮
,使参数表处于监控状态,再将M1.0的参数false改为true,最后单击“更新参数”按钮 ,更新参数,伺服电动机旋转。DB1中显示伺服驱动反馈的参数,如图11-55所示。
,更新参数,伺服电动机旋转。DB1中显示伺服驱动反馈的参数,如图11-55所示。
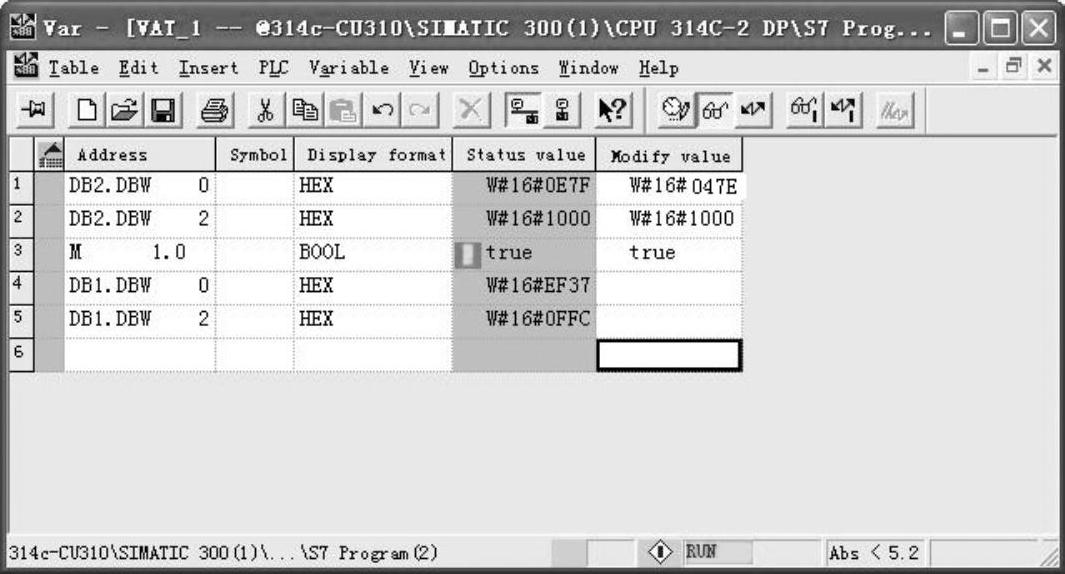
图11-55 参数表处于监控状态
西门子的伺服系统功能强大,需要设置的参数较多,因此使用比较复杂,请读者参考相关说明书。若读者已经掌握了西门子变频器,无疑有利于读者掌握西门子伺服系统。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。