



PID控制器的参数整定是控制系统设计的核心内容。根据被控过程的特性,确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有如下两大类:
一是理论计算整定法。它主要依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接使用,还必须通过工程实际进行调整和修改。
二是工程整定法。它主要依赖于工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。
1.整定的方法和步骤
现在一般采用的是临界比例法。利用该方法进行PID控制器参数的整定步骤如下:
1)首先预选择一个足够短的采样周期使系统工作。
2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期。
3)在一定的控制度下通过公式计算得到PID控制器的参数。
2.PID参数的经验值
在实际调试中,只能先大致设定一个经验值,然后根据调节效果修改。常见系统的经验值如下:
1)对于温度系统:P(%)20~60,I(分)3~10,D(分)0.5~3。
2)对于流量系统:P(%)40~100,I(分)0.1~1。
3)对于压力系统:P(%)30~70,I(分)0.4~3。
4)对于液位系统:P(%)20~80,I(分)1~5。
3.PID参数的整定实例(https://www.xing528.com)
PID参数的整定对于初学者来说并不容易,不少初学者看到PID的曲线往往不知道是什么含义,当然也就不知道如何着手调节了,以下用几个简单的例子进行介绍。
【例9-1】某系统的电炉在进行PID参数整定时,其输出曲线如图9-5所示,设定值和测量值重合(55℃),所以有人认为PID参数整定成功,请读者分析,并给出自己的见解。
解:在PID参数整定时,分析曲线图是必不可少的,测量值和设定值基本重合这是基本要求,并非说明PID的参数整定就一定合理。
分析PID运算结果的曲线至关重要。如图9-5所示,PID运算结果的曲线虽然很平滑,但过于平坦,这样电炉在运行过程中,其抗干扰能力弱,也就是说,当负载对热量需要稳定时,这个设定无问题,但当负载热量变化大时,测量值和设定值就未必处于重合状态了。这种PID运算结果的曲线过于平坦说明P过小。

图9-5 PID曲线图(1)
将P的数值设定为30.0,如图9-6所示,整定就比较合理了。
【例9-2】某系统的电炉在进行PID参数整定,其输出曲线如图9-7所示,设定值和测量值重合(55℃),所以有人认为PID参数整定成功,请读者分析,并给出自己的见解。
解:如图9-7所示,虽然测量值和设定值基本重合,但PID参数整定不合理。
这是因为PID运算结果的曲线已经超出了设定的范围,实际就是超调,说明比例环节P过大。
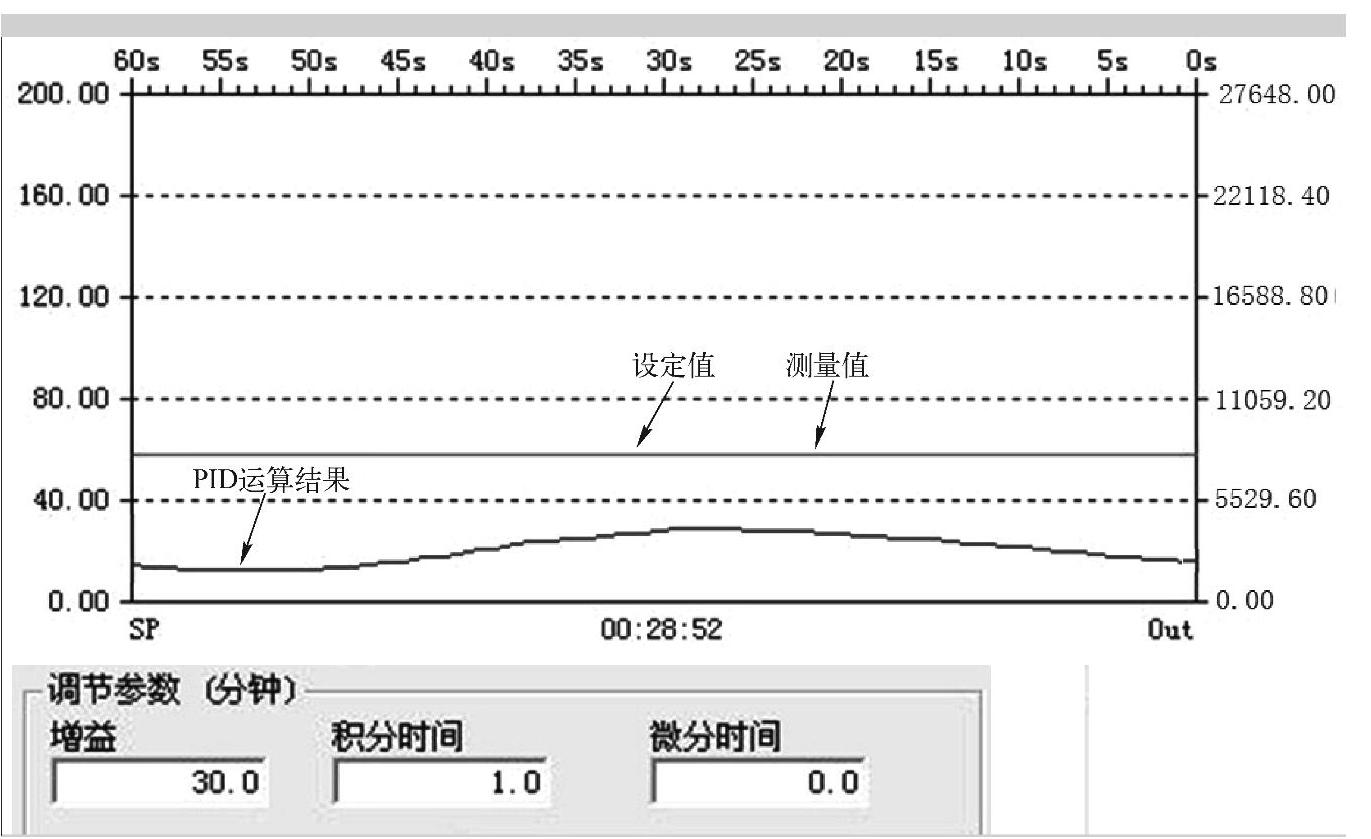
图9-6 PID曲线图(2)
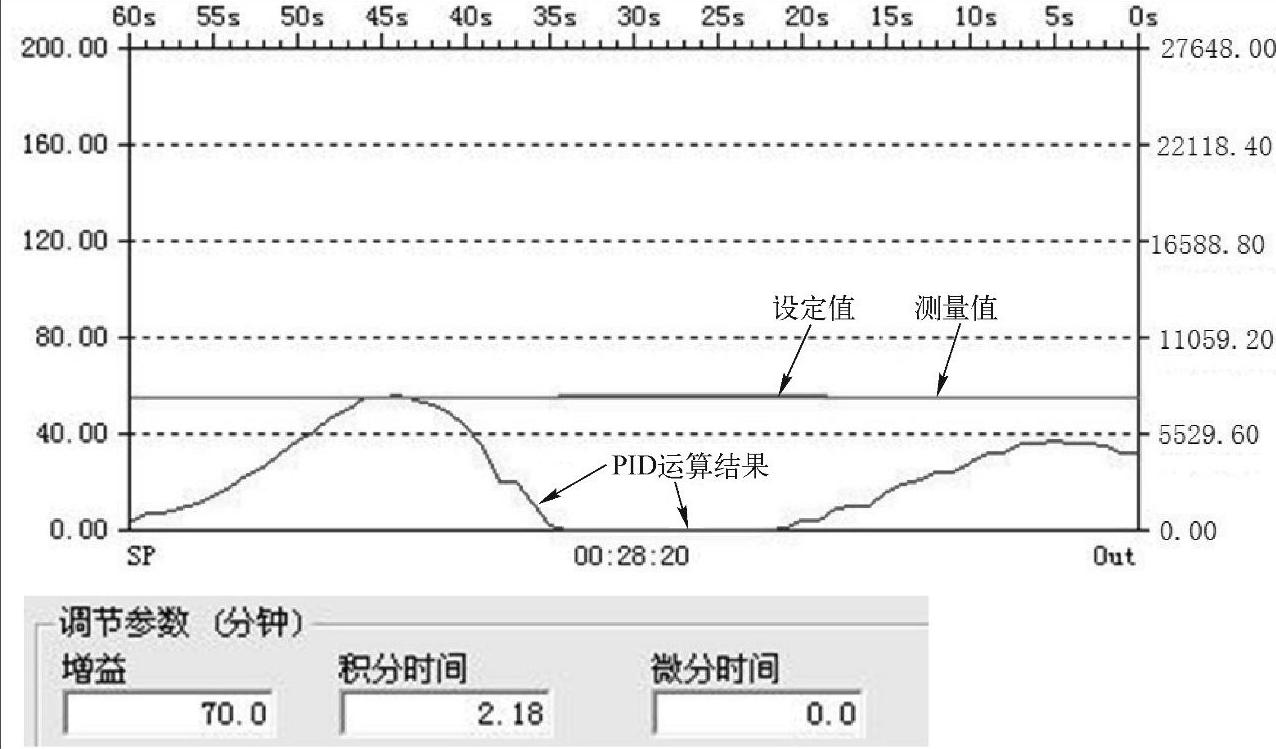
图9-7 PID曲线图(3)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。