



步进电动机是一种将电脉冲信号转换成角位移或线位移的执行元件,其转轴输出的角位移量与输入的脉冲数成正比,通过改变输入脉冲频率可实现调速。步进电动机具有定位精度高、同步运行特性好、调速范围宽、反应速度快、结构简单等特点,很适合数字控制系统的要求,因此广泛应用于数控机床、计算机外围设备、自动化仪器仪表中作为执行元件。
步进电动机分为反应式、永磁式和混合式三种,本书只介绍常用的反应式步进电动机。三相反应式(又称为磁阻式)步进电动机的结构示意图如图1-50所示,其定子和转子铁心均用硅钢片叠制而成,定子上有6个凸形磁极,每个磁极上都装有绕组,每两个相对磁极组成一相。转子铁心表面有许多均匀排布的齿,转子铁心没有绕组,为简明起见,图1-50只画出4个齿的转子铁心。
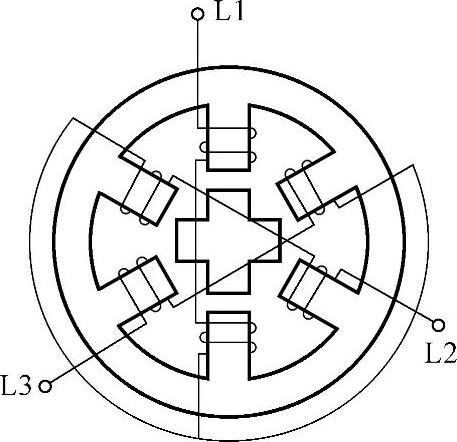
图1-50 三相反应式步进电动机的结构示意图
步进电动机的转动受脉冲信号的控制,三相定子绕组由脉冲分配器控制的电源轮流通电。设L1相首先通电,L2、L3相不通电,则产生L1-L1′轴线方向的磁通,并通过转子形成闭合回路。这时,L1,L1′极就是一对N、S磁极,在磁场的作用下,转子总是力图转动到磁阻最小的位置,即转子的一对齿(1,3)对齐L1、L1′极的位置,如图1-51a所示。然后,L2相通电,L1、L3相断电,转子便在L2、L2′磁极的吸引下顺时针转动30°,即一对齿(2,4)与L2、L2′极对齐,如图1-51b所示。接着L3相通电,L1、L2相断电,转子又顺时针转动30°,它的一对齿(1,3)和L3、L3′极对齐,如图1-51c所示。如此按L1→L2→L3→L1…的顺序轮流通电,步进电动机就按顺时针方向一步一步转动。每一步的转角为一个步距角θ,电流按L1、L2、L3相顺序换接一轮,磁场旋转一周,转子前进一个齿距角。这种通电方式称为单三相工作方式。此种工作方式下转子为四个齿时,步距角为30°。
步进电动机还经常采用三相六拍工作方式和双三相工作方式。三相六拍工作方式就是每个周期内有六种通电状态。这六种通电状态的顺序是L1→L1L2→L2→L2L3→L3→L3L1→L1…,可见,在六拍通电方式中,除了单相绕组单独通电状态外,还有两相绕组同时通电的状态,这时转子齿的位置将位于通电的两相磁极中间位置。因此,在三相六拍工作方式下,转子每一步转过的角度只是三相三拍的一半,转子为四齿时,步距角为15°。
在双三拍工作方式下,每种状态都是两相绕组同时通电,通电顺序是L1L2→L2L3→L3L1→L1L2…,双三拍工作时,步进电动机的步距角也是30°。
步进电动机的步距角θ的计算公式为(https://www.xing528.com)
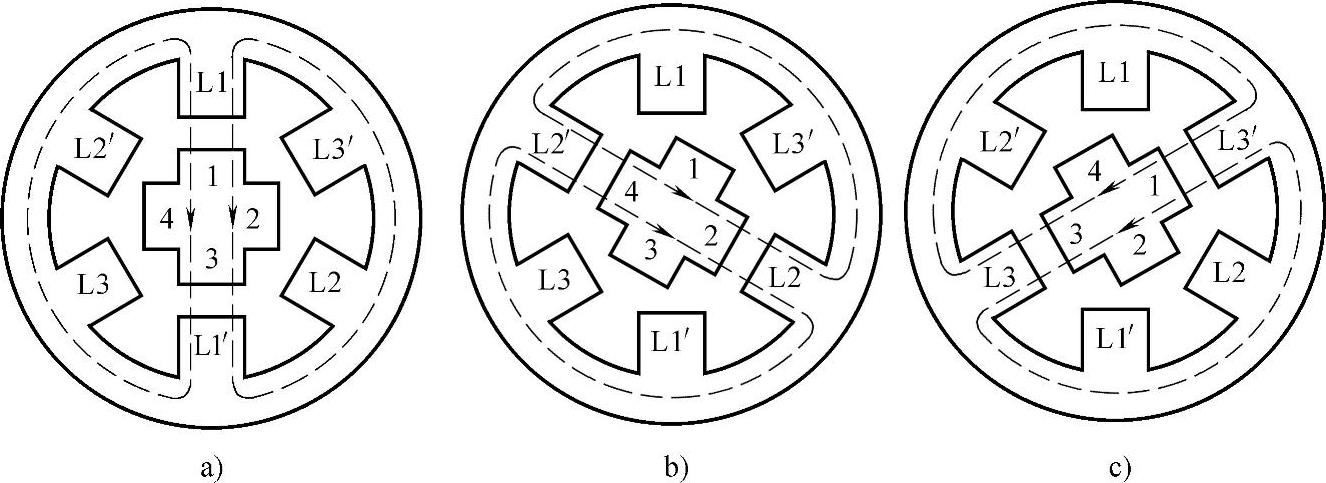
图1-51 步进电动机的单三相工作方式

式中,N为运行拍数;Z为转子齿数。
实际的步进电动机多采用的步距角为3°/1.5°或1.5°/0.75°。按式(1-44)计算可知转子齿数分别为40个或80个。
若要改变步进电动机的转动方向,只需按相反顺序为三相绕组通电即可。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。