



实例概述:
在本实例的设计过程中,镜像特征的运用较为巧妙,在镜像时应注意镜像基准面的选择。塑料垫片的零件模型和模型树如图6.1所示。

图6.1 塑料垫片的零件模型及模型树
Step1.新建文件。选择下拉菜单

 命令,系统弹出“新建”对话框。在
命令,系统弹出“新建”对话框。在 选项卡的
选项卡的 区域中选取模板类型为
区域中选取模板类型为 ,在
,在 文本框中输入文件名称GAME,单击
文本框中输入文件名称GAME,单击 按钮,进入建模环境。
按钮,进入建模环境。
Step2.创建图6.2所示的旋转特征1。选择



 命令(或单击
命令(或单击 按钮),单击
按钮),单击 区域中的
区域中的 按钮,在绘图区选取XZ基准平面为草图平面,绘制图6.3所示的截面草图。在绘图区中选取Z轴为旋转轴。在“旋转”对话框
按钮,在绘图区选取XZ基准平面为草图平面,绘制图6.3所示的截面草图。在绘图区中选取Z轴为旋转轴。在“旋转”对话框 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,并在
选项,并在 文本框中输入值0,在
文本框中输入值0,在 下拉列表中选择
下拉列表中选择 选项,并在
选项,并在 文本框中输入值360;单击
文本框中输入值360;单击 按钮,完成旋转特征1的创建。
按钮,完成旋转特征1的创建。

图6.2 旋转特征1

图6.3 截面草图
Step3.创建图6.4所示的基准平面1。选择



 命令(或单击
命令(或单击 按钮),系统弹出“基准平面”对话框。在
按钮),系统弹出“基准平面”对话框。在 区域的下拉列表中选择
区域的下拉列表中选择 选项,在绘图区选取XY基准平面,输入偏移值6。单击
选项,在绘图区选取XY基准平面,输入偏移值6。单击 按钮,完成基准平面1的创建。
按钮,完成基准平面1的创建。
Step4.创建图6.5所示的基准平面2。选择



 命令(或单击
命令(或单击 按钮),系统弹出“基准平面”对话框。在
按钮),系统弹出“基准平面”对话框。在 区域的下拉列表中选择
区域的下拉列表中选择 选项,在绘图区选取YZ基准平面,在
选项,在绘图区选取YZ基准平面,在 区域选择ZC轴,输入角度值30。单击
区域选择ZC轴,输入角度值30。单击 按钮,完成基准平面2的创建。
按钮,完成基准平面2的创建。

图6.4 基准平面1

图6.5 基准平面2
Step5.创建图6.6所示的拉伸特征1。选择下拉菜单


 命令,系统弹出“拉伸”对话框。选取基准平面1为草图平面,绘制图6.7所示的截面草图;在
命令,系统弹出“拉伸”对话框。选取基准平面1为草图平面,绘制图6.7所示的截面草图;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,并在其下的
选项,并在其下的 文本框中输入值0,在
文本框中输入值0,在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,并在其下的
选项,并在其下的 文本框中输入值2;在
文本框中输入值2;在 区域的下拉列表中选择
区域的下拉列表中选择 选项,采用系统默认的求差对象。单击
选项,采用系统默认的求差对象。单击 按钮,完成拉伸特征1的创建。
按钮,完成拉伸特征1的创建。
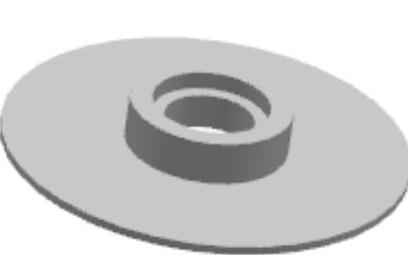
图6.6 拉伸特征1
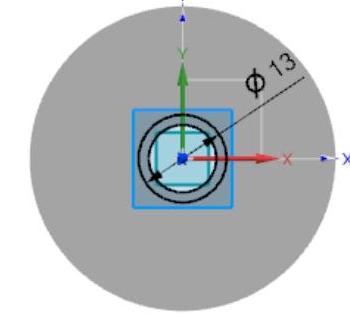
图6.7 截面草图
Step6.创建图6.8所示的旋转特征2。选择


 命令(或单击
命令(或单击 按钮),单击
按钮),单击 区域中的
区域中的 按钮,在绘图区选取YZ基准平面为草图平面,绘制图6.9所示的截面草图。在绘图区中选取Z轴为旋转轴。在“旋转”对话框
按钮,在绘图区选取YZ基准平面为草图平面,绘制图6.9所示的截面草图。在绘图区中选取Z轴为旋转轴。在“旋转”对话框 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,并在
选项,并在 文本框中输入值0,在
文本框中输入值0,在 下拉列表中选择
下拉列表中选择 选项,并在
选项,并在 文本框中输入值360;在
文本框中输入值360;在 区域的下拉列表中选择
区域的下拉列表中选择 选项,采用系统默认的求差对象。单击
选项,采用系统默认的求差对象。单击 按钮,完成旋转特征2的创建。
按钮,完成旋转特征2的创建。

图6.8 旋转特征2
 (https://www.xing528.com)
(https://www.xing528.com)
图6.9 截面草图
Step7.创建图6.10所示的拉伸特征2。选择下拉菜单



 命令,系统弹出“拉伸”对话框。选取XY基准平面为草图平面,绘制图6.11所示的截面草图;在
命令,系统弹出“拉伸”对话框。选取XY基准平面为草图平面,绘制图6.11所示的截面草图;在 下拉列表中选择
下拉列表中选择 选项;在
选项;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,并在其下的
选项,并在其下的 文本框中输入值0,在
文本框中输入值0,在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,并在其下的
选项,并在其下的 文本框中输入值5;在
文本框中输入值5;在 区域的下拉列表中选择
区域的下拉列表中选择 选项,采用系统默认的求差对象。单击
选项,采用系统默认的求差对象。单击 按钮,完成拉伸特征2的创建。
按钮,完成拉伸特征2的创建。
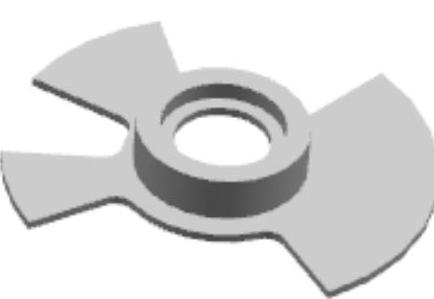
图6.10 拉伸特征2

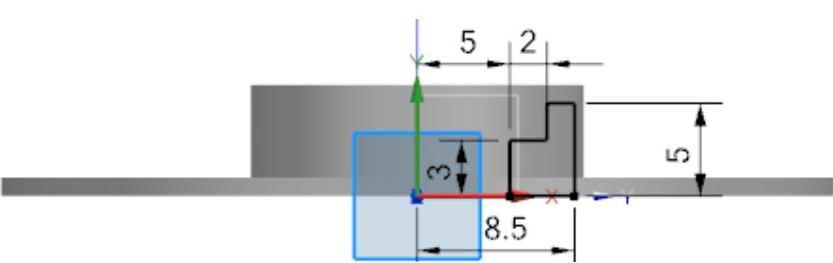
图6.11 截面草图
Step8.创建图6.12所示的拉伸特征3。选择下拉菜单


 命令,系统弹出“拉伸”对话框。选取基准平面2为草图平面,绘制图6.13所示的截面草图;在
命令,系统弹出“拉伸”对话框。选取基准平面2为草图平面,绘制图6.13所示的截面草图;在 下拉列表中选择
下拉列表中选择 选项,单击图形区的基准平面2;在
选项,单击图形区的基准平面2;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,并在其下的
选项,并在其下的 文本框中输入值2.5;在
文本框中输入值2.5;在 区域的下拉列表中选择
区域的下拉列表中选择 选项,采用系统默认的合并对象。单击
选项,采用系统默认的合并对象。单击 按钮,完成拉伸特征3的创建。
按钮,完成拉伸特征3的创建。
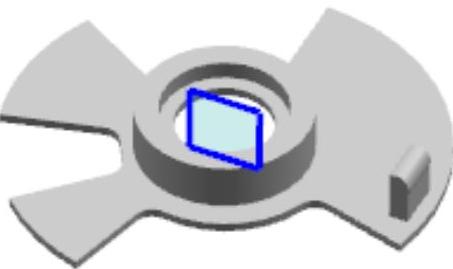
图6.12 拉伸特征3
图6.13 截面草图
Step9.创建图6.14所示的拉伸特征4。选择下拉菜单



 命令,系统弹出“拉伸”对话框。选取基准平面2为草图平面,绘制图6.15所示的截面草图;在
命令,系统弹出“拉伸”对话框。选取基准平面2为草图平面,绘制图6.15所示的截面草图;在 下拉列表中选择
下拉列表中选择 选项,单击图形区的基准平面2;在
选项,单击图形区的基准平面2;在 区域的
区域的 下拉列表中选择
下拉列表中选择 选项,并在其下的
选项,并在其下的 文本框中输入值0.25,在
文本框中输入值0.25,在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 文本框中输入值1,在
文本框中输入值1,在 文本框中输入值0;在
文本框中输入值0;在 区域的下拉列表中选择
区域的下拉列表中选择 选项,采用系统默认的合并对象。单击
选项,采用系统默认的合并对象。单击 按钮,完成拉伸特征4的创建。
按钮,完成拉伸特征4的创建。
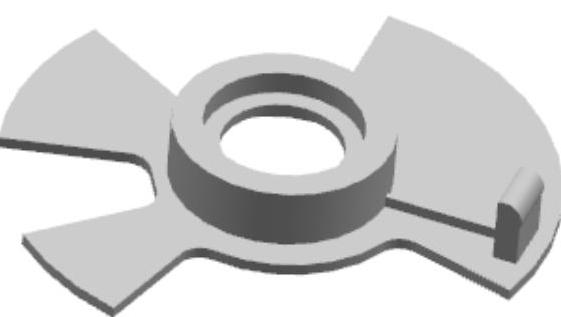
图6.14 拉伸特征4

图6.15 截面草图
Step10.创建图6.16所示的镜像特征1。选择下拉菜单



 命令,在绘图区中选取图6.12所示的拉伸特征3和图6.14所示的拉伸特征4为要镜像的特征。在
命令,在绘图区中选取图6.12所示的拉伸特征3和图6.14所示的拉伸特征4为要镜像的特征。在 区域中单击
区域中单击 按钮,在绘图区中选取YZ基准平面作为镜像平面。单击
按钮,在绘图区中选取YZ基准平面作为镜像平面。单击 按钮,完成镜像特征1的创建。
按钮,完成镜像特征1的创建。
Step11.创建图6.17所示的镜像特征2。选择下拉菜单



 命令,在绘图区中选取图6.16所示的镜像特征1、图6.12所示的拉伸特征3和图6.14所示的拉伸特征4为要镜像的特征。在
命令,在绘图区中选取图6.16所示的镜像特征1、图6.12所示的拉伸特征3和图6.14所示的拉伸特征4为要镜像的特征。在 区域中单击
区域中单击 按钮,在绘图区中选取XZ基准平面作为镜像平面。单击
按钮,在绘图区中选取XZ基准平面作为镜像平面。单击 按钮,完成镜像特征2的创建。
按钮,完成镜像特征2的创建。

图6.16 镜像特征1

图6.17 镜像特征2
Step12.后面的详细操作过程请参见随书光盘中video\ch06\reference\文件下的语音视频讲解文件GAME-r01.exe。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。