



固态减压软起动器,国外称为Solid State Soft Starter(固态软起动器),有一种小容量的称Solid State Contactor(固态接触器),是一种固态减压软起动控制装置,它实质上是一种利用晶闸管调压方式的减压起动方法,是一种集软起动、软停车、制动、轻载节能和多种保护功能于一体的三相异步电动机减压起动装置。图4-23是三相笼型异步电动机直接全电压起动、 -△减压起动和软起动器起动特性的比较。
-△减压起动和软起动器起动特性的比较。
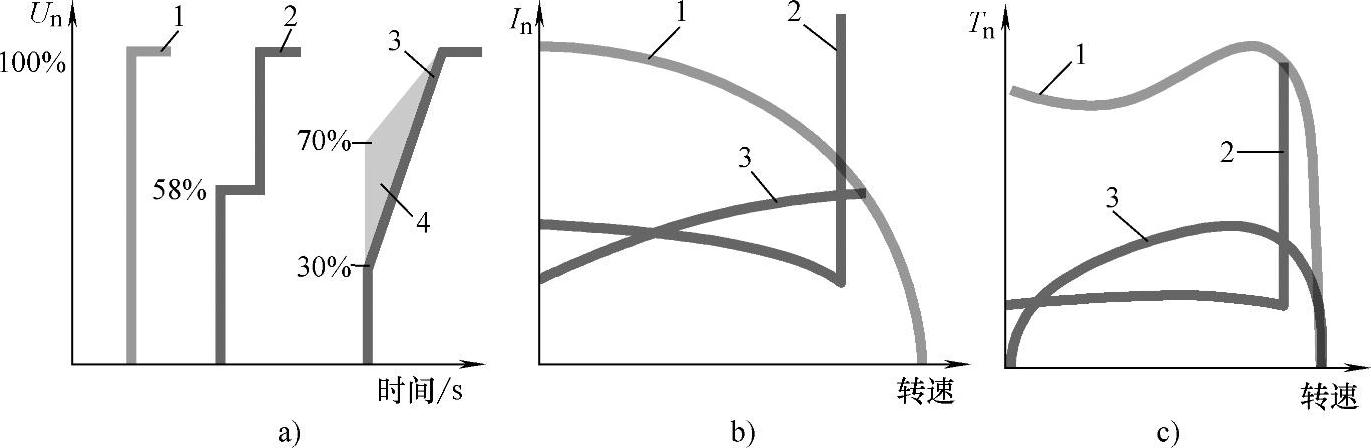
图4-23 三种起动方法的比较
a)电动机的起动电压 b)电动机的起动电流 c)电动机的起动转矩
1—直接全电压起动 2— -△减压起动 3—软起动器起动 4—斜坡调节
-△减压起动 3—软起动器起动 4—斜坡调节
由图4-23可见,软起动器起动具有明显的优点,起动电压可调,起动电流大幅降低,起动转矩平滑。因此,软起动器在工业企业得到广泛普及应用,以取代 -△减压起动和自耦变压器减压起动。
-△减压起动和自耦变压器减压起动。
近年来,国内外软起动器技术发展很快,从最初的单一软起动、软停机、故障保护、轻载节能等功能,发展为全数字、智能化异步电动机起动控制装置。新型的软起动器控制功能多样化,多种软起动曲线、软停机方式,故障检测和保护功能智能化,具有通信连网功能,体积小型化,规格多,适应范围广。
1.固态减压软起动控制的原理
目前市场上的产品分为固态减压软起动柜和软起动器两种。固态减压软起动柜由电动机的起停控制装置和软起动器组成,其核心部件是软起动器,产品一般做成控制柜形式,只要接通电源及相应连线即可工作。软起动器是由晶闸管模块和以单片机为核心的控制电路组成的,产品一般做成装置型,外形类似于通用变频器,使用时需要另外配置电动机起停和旁路控制线路。
软起动器的主要结构是一组串接于三相电源与被控电动机之间的三组(有的是两组)反并联晶闸管或双向晶闸管及其控制电路,利用晶闸管移相控制原理,控制三相反并联晶闸管的导通角,从而控制输出电压,使被控电动机的输入电压和电流按照预先设定的起动曲线平滑改变,从而实现平滑起动和控制,即软起动。这样,可基本消除电流的跃变,减小起动电流对电网、电机本身及相连设备的电气及机械冲击。起动时,使晶闸管的导通角从0°开始,逐渐前移,电动机的端电压从零开始,按预设函数关系逐渐上升,直至达到满足起动转矩而使电动机顺利起动为止。在整个起动过程中,软起动器的输出是一个平滑升压过程(具有限流功能),直到晶闸管全导通,电动机在额定电压下工作,或通过旁路装置使电动机挂接到电网上全电压运行;停止时,则相反。这就是软起动控制器的工作原理。
软起动器一般都具有软起动、软停止、限流起动、脉冲突跳起动、斜坡起动、泵控制、预置低速运行、制动、节能运行等控制和故障诊断等功能。新型的全数字软起动器或称智能化软起动器还采用双CPU,控制电路板采用SMT表面贴片工艺,可靠性高。具有多种起动方式和控制方式,一台软起动器可拖动多台电动机;具有过电流、过载、断相、晶闸管过热等保护功能,以及智能风机控制功能;具有可编程输入输出触头、模拟量输入输出触头、转速反馈控制、电动机热敏电阻输入触头,以及LCD液晶数字显示、键盘操作、标准RS-232/RS-485通信接口,支持MODBUS、PROFIBUS-DP、AS-i、DeviceNet等现场总线通信协议。固态接触器式软起动器的外形结构与普通交流接触器的外形几乎相同,可以安装在标准的35mm导轨上。用法也与普通交流接触器类似。图4-24是新型的、比较先进的全数字软起动器原理框图,图4-24a是其内部结构图,图4-24b是控制板原理框图。图4-25是接线原理图。
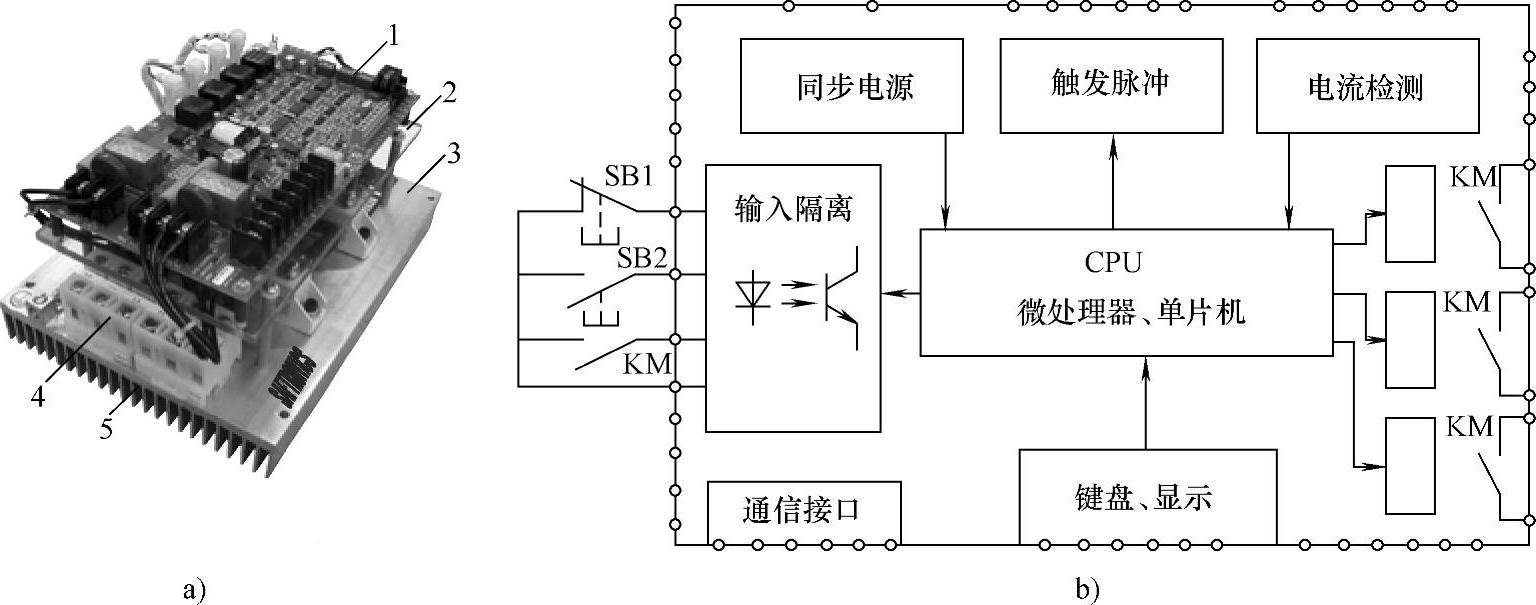
图4-24 全数字软起动器原理框图
a)内部结构示意图b)控制板原理框图
1—控制板 2—主电路板3—底板 4—主接线端子 5—散热器
从图4-24和图4-25可见,主回路是一个晶闸管调压回路,由3对反并联晶闸管组成,另外,利用3个霍尔传感器检测三相定子电流。在起动过程中,6个晶闸管的触发延迟角由CPU控制,使加在电动机三相定子绕组上的电压由零逐渐平滑地升至全电压。同时,电流检测单元将检测的三相定子电流送到CPU进行运算和判断,并控制输出电压。另外,由电动机理论可知,当电动机的输入电源频率不变时,电动机的输出转矩与输入电压的二次方成正比。因此,软起动器不仅使电动机定子电压连续平滑地变化,实现升压限流起动,而且避免了电动机起动转矩的冲击现象。图4-26是几种软起动器产品的外貌图。

图4-25 全数字软起动器接线原理图
图4-26a是ABB公司的PSS系列软起动器,有紧凑型和通用型两种。紧凑型PSS03~25型的容量范围为0.75~15kW,用35mmDIN导轨安装;通用型PSS18/30~300/515型的容量范围为7.5~160kW。额定工作电压208~690V。适合于大多数的应用场合。它可以在内部通过双列直插式开关排将 联结电动机连接为△联结,因此可替代
联结电动机连接为△联结,因此可替代 -△减压起动,与标准的
-△减压起动,与标准的 -△减压起动相比,可减少42%的起动电流。PSS系列软起动器的起动升压时间的设定范围为1~30s;停止降压时间的设定范围为0~30s;起动时初始电压设定范围为(40%~70%)Ue;电流极限值(限流)设定范围为电动机额定电流的1.5~4倍。通过拨码旋转开关设置。工作状态通过LED信号指示。无旁路接触器时,也可连续运行。具有一台软起动器拖动多台电动机的功能;具有过电流、过载、断相、晶闸管过热等保护功能、智能风机控制功能。具有标准通信接口,MODBUS-RTU通信协议,可选PROFIBUS总线桥。
-△减压起动相比,可减少42%的起动电流。PSS系列软起动器的起动升压时间的设定范围为1~30s;停止降压时间的设定范围为0~30s;起动时初始电压设定范围为(40%~70%)Ue;电流极限值(限流)设定范围为电动机额定电流的1.5~4倍。通过拨码旋转开关设置。工作状态通过LED信号指示。无旁路接触器时,也可连续运行。具有一台软起动器拖动多台电动机的功能;具有过电流、过载、断相、晶闸管过热等保护功能、智能风机控制功能。具有标准通信接口,MODBUS-RTU通信协议,可选PROFIBUS总线桥。
图4-26b是ABB公司的PST/PSTB系列软起动器,内置微处理器,具有LCD显示操作板,使用仅有4个按键的键盘操作和运行。它有多种语言可供选择,使用文字显示信息,可显示汉语菜单。除一般软起动器具有的功能外,它具有转矩控制、转矩极限、模拟量输出等功能;具有3个可编程信号继电器。出厂默认值设定起动时为电压斜坡方式,可以根据需要设定转矩控制和转矩极限。集成了电子过载继电器、相序监测继电器、大电流和PTC保护以及晶闸管保护。内置的通信接口支持PROFIBUS、AS-i、DeviceNet、MODBUS-RTU等现场总线通信协议。
图4-26d是OMRON公司G3J-S系列固态接触器,外形尺寸仅80mm(宽)×100mm(高)×100mm(深),约730g。容量范围为0.75~2.2kW,用35mmDIN导轨安装,也可螺钉安装。具有一般软起动器所具备的功能。初始转矩设定(电位器设定)范围(200%~450%)In,直接输入电动机起动时的初始转矩设为600%In;起动升压时间的设定范围为1~25s;停止降压时间的设定范围为0~25s。可以像接触器那样使用。
图4-26e中所示的雷诺尔公司JJR1系列软起动器的容量范围为5.5~660kW。具有可选的限流型和电压斜坡型两种起动方式,键盘设定。停车方式可以是自由停车、软停车和制动停车。所有输出输入触头为可编程触头,内置各种负载智能化程序,内置RS-485通信接口、LED显示和操作键盘。具备键盘控制和远方控制切换功能。

图4-26 几种软起动器产品的外貌图
a)PSS系列 b)PST/PSTB系列 c)PSS系列拨码开关设置窗口放大 d)G3J-S系列 e)JJR1系列
1—透明盖 2—拨码开关 3—LED指示灯 4—LCD显示操作板 5—通信接口 6—起动升压时间设置 7—停止时间设置 8—初始电压设置 9—电流极限值设置 10—双列直插式开关排(内部△联结)
2.软起动器的工作特性
(1)起动转矩可调,对电网的冲击电流小。异步电动机在软起动过程中,软起动器是通过控制加到电动机上的平均电压来控制电动机的起动电流和起动转矩的,能使电动机的起动电流以恒定的斜率平稳上升,使起动转矩逐渐增加,转速也逐渐增加。软起动器可以通过设定得到不同的起动特性曲线,以满足不同负载的起动特性要求。软起动器的起动转矩可调,从而对电网的冲击电流小,不会造成大的电压降落,也满足了不同负载对起动转矩的不同要求。
(2)恒流起动。软起动过程中,不受电网电压波动的影响。在晶闸管的移相电路中,通过电动机电流反馈,使电动机在起动过程中保持恒流,由于起动电流可整定,当电网电压上下波动时,可自动地通过控制电路跟随增大或减小晶闸管导通角,从而维持原设定值,保持起动电流恒定。
(3)软起动,软停机。使用软起动器时,可根据负载的不同,选择起动方式、整定和控制起动和停止时间的长短,以实现软起动,软停机。软停机功能可消除自由停车方式可能产生的惯性冲击。另外可以制动停机,可实现零速停机,准确定位,在一些应用场合可满足准确停机的需要。软停机控制是当电动机需要停机时,不是立即切断电动机的电源,而是通过调节晶闸管的导通角,从全导通状态逐渐地减小,从而使电动机的端电压逐渐降低而切断电源的,这一过程时间可整定。传统的制动控制是通过瞬间停电完成的。但有许多应用场合,不允许电动机瞬间关机。如水泵系统,如果瞬间停机,会产生巨大的“水锤”效应,使管道甚至水泵遭到损坏。为减少和防止“水锤”效应,需要电动机逐渐停机,在泵站中,应用软停机可避免泵站设备损坏,减少维修费用和维修工作量。再如工业上的皮带机、升降机也不希望突然停车。采用软停车方式,在发出停机信号时,电动机端电压逐渐减小,实现软停机目的。
(4)完善的保护、监控功能。新型的软起动器具有比较完善的保护、监控功能,以中文菜单形式显示设备的运行和故障诊断信息。主要保护功能有限流、过载、缺相、晶闸管短路、转子堵塞、CPU故障等。运行中出现故障,系统能快速封锁触发脉冲,使晶闸管关断,并发出报警信号,如起动时间过长、过载等。
(5)轻载节能功能。有些产品具有轻载节能功能,可设置节能运行方式。可以根据电动机功率因数的高低,自动判断电动机的负载率,当电动机处于空载或负载率很低时,通过相位控制使晶闸管的导通角发生变化,从而改变输入电动机的功率,提高电动机的功率因数,以达到节能的目的。
3.软起动器的起动和停机方式和功能
软起动器产品一般有如下几种起动和停机方式。典型的特性曲线示意图如图4-27所示。
(1)限流起动
限流起动是限制电动机的起动电流,主要用在轻载起动时降低起动电压。限流起动可使电动机在起动时的最大电流不超过预先设定的限流值Im,Im可根据电网容量及电动机负载情况而定。设定范围一般规定在电动机额定电流Ie的1.5~5.0倍之间选择。在保证起动压降下发挥电动机的最大起动转矩缩短起动时间,是较优的轻载软起动方式。
(2)电压(电流)斜坡起动
电压(电流)斜坡起动方式是在晶闸管的移相电路中引入电动机电流反馈实现的,通过设定电动机输入电压(电流)的上升速率来完成电动机的起动过程,电压(电流)由小到大斜坡线性上升,从而将电动机的起动转矩由小到大线性上升。也就是将传统的降压起动从有级变成了无级降压起动。它的优点是起动平滑,柔性好,同时降低电动机起动时对电网的冲击,主要用于重载起动。由于电压(电流)从初始值到额定值是线性变化(初始值可保证电动机的最大起动力矩),所以整个起动过程可保证电动机平稳的起动。(https://www.xing528.com)
这种起动方式在电动机起动的初始阶段起动电流逐渐增加,当电流达到预先所设定的限流值后保持恒定,直至起动完毕。起动过程中,电流上升变化的速率是可以根据电动机负载调整设定。斜坡陡,电流上升速率大,起动转矩大,起动时间短。当负载较轻或空载起动时,所需起动转矩较低,应使斜坡缓和一些,当电流达到预先所设定的限流点值后,再迅速增加转矩,完成起动。这种软起动方式是应用最多的起动方法,尤其适用于风机、泵类负载的起动。
有的产品具有双斜坡起动方式,即同时设定电压和电流的初始斜坡起动值。
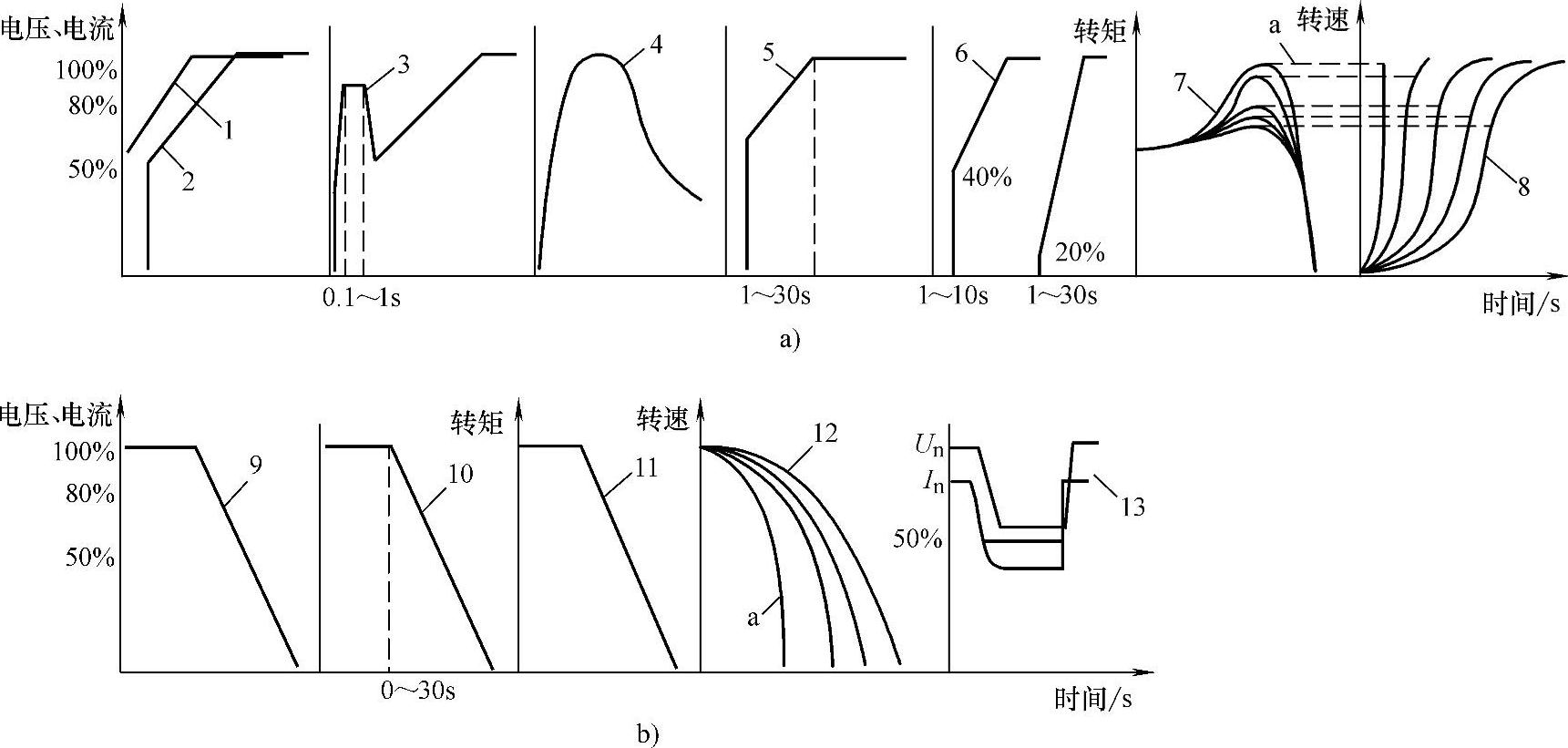
图4-27 软起动器的典型特性曲线示意图
a)软起动特性曲线 b)软停机特性曲线
1—起动极限电压 2—起动斜坡 3—脉冲阶跃 4—电流极限 5—加速时间 6—双斜坡 7—起动转矩 8—起动转速 9—停机斜坡 10—停机时间 11—制动转矩 12—停机速度 13—节电模式
注:一般情况下是在a曲线所示的转矩和转速方式下运行,其他几种曲线可通过设定值实现。
(3)转矩控制起动
通过控制起动转矩,从而改善电动机的起动特性,抑制浪涌转矩并且降低冲击电流。转矩控制起动主要用于重载起动。转矩加脉冲阶跃控制是在起动的瞬间用脉冲阶跃转矩克服电动机的静转矩,然后转矩平滑上升,缩短起动时间,但是,脉冲阶跃转矩会产生尖脉冲,影响电网安全运行,要特别引起注意。
(4)脉冲阶跃起动
脉冲阶跃起动特性曲线在起动开始阶段,晶闸管在极短时间内以较大电流导通,经过一段时间后回落,再按原设定值线性上升,进入恒流起动状态。该起动方法适用于重载并需克服较大静摩擦的起动场合。
(5)停机方式
软起动器的停车可以靠负载惯性自由停机。在有些场合,并不希望电动机突然停止,可以采用斜坡降速方式软停机。采用软停机方式,在发出停机信号时,电动机端电压逐渐减小,实现软停机目的。对于惯性力矩大的负载或需要快速停机的场合,可以选择快速制动。软起动器是采用向电动机输入直流电,以实现快速制动的。
在这种软停机方式下,如果有旁路接触器,则需要切换到软起动器,使软起动器的输出电压由全压逐渐减小,使电动机转速平稳降低,以避免机械震荡,直到电动机停止运行。
在自由停机方式下,软起动器接到停止命令后,立即断开旁路接触器,并禁止软起动器晶闸管的电压输出,电动机依负载惯性逐渐停车。
4.软起动器的应用
在使用软起动器时,需要附加一些起停控制电路及旁路电路,将软起动器、旁路电路、断路器和控制电路等组装为软起动柜,以实现电动机的软起动、软停车、故障保护、报警、自动控制等功能。有些场合还需要具有运行和故障状态监视、通信功能、图形显示操作等。这样就需要选用全数字(智能)软起动器,以便与可编程序控制器等连网通信。当然也可以选购成套固态减压软起动控制柜或电动机控制中心(MCC)。
对于一般用途的泵类、风机类负载往往只需要软起动、软停车,电动机全速运行;另外,可能需要用一台软起动器起动多台电动机机组,以节约资金投入,这时就需要采用旁路接触器。但是,最好一台软起动器控制一台电动机机组,这样,控制既方便,又能充分发挥软起动器的故障检测、故障保护和节电等功能。
(1)单台软起动器控制起动多台电动机
图4-28所示是用一台软起动器对2台水泵机组进行软起动的示例,一台软起动器对2台以上机组进行软起动的原理类似。但不能同时起动或停机,只能一台一台按顺序起动和停机。

图4-28 用一台软起动器对2台水泵机组软起动示例
a)主电路 b)泵组1的控制电路

图4-29 电动机工作曲线的设置
图4-28a中,接触器K1和K2分别是泵组1和泵组2的旁路接触器。当泵组1软起动时,接触器K1处于断开位置,合上接触器K3,电动机软起动;起动结束后,将接触器K3断开,合上接触器K1,泵组1被切换到电网运行。若需要电动机软停机,一旦发出停车信号,先将接触器K1分断,再合上接触器K3,由软起动器对电动机进行软停车。软起动器仅在起动、停机时工作,可以避免长期运行使晶闸管发热,延长使用寿命。图4-28b是泵组1的控制电路,泵组2的控制电路与此图一样,只是元件编号不一样,另外,泵组1的控制电路和泵组2的控制电路互锁,如图4-28b中的KM2。KM是软起动器的控制输出转接触头。该电路也可用于泵组的一用一备控制,一用一备控制方式下,机组起动后,可使软起动器运行在节电方式。
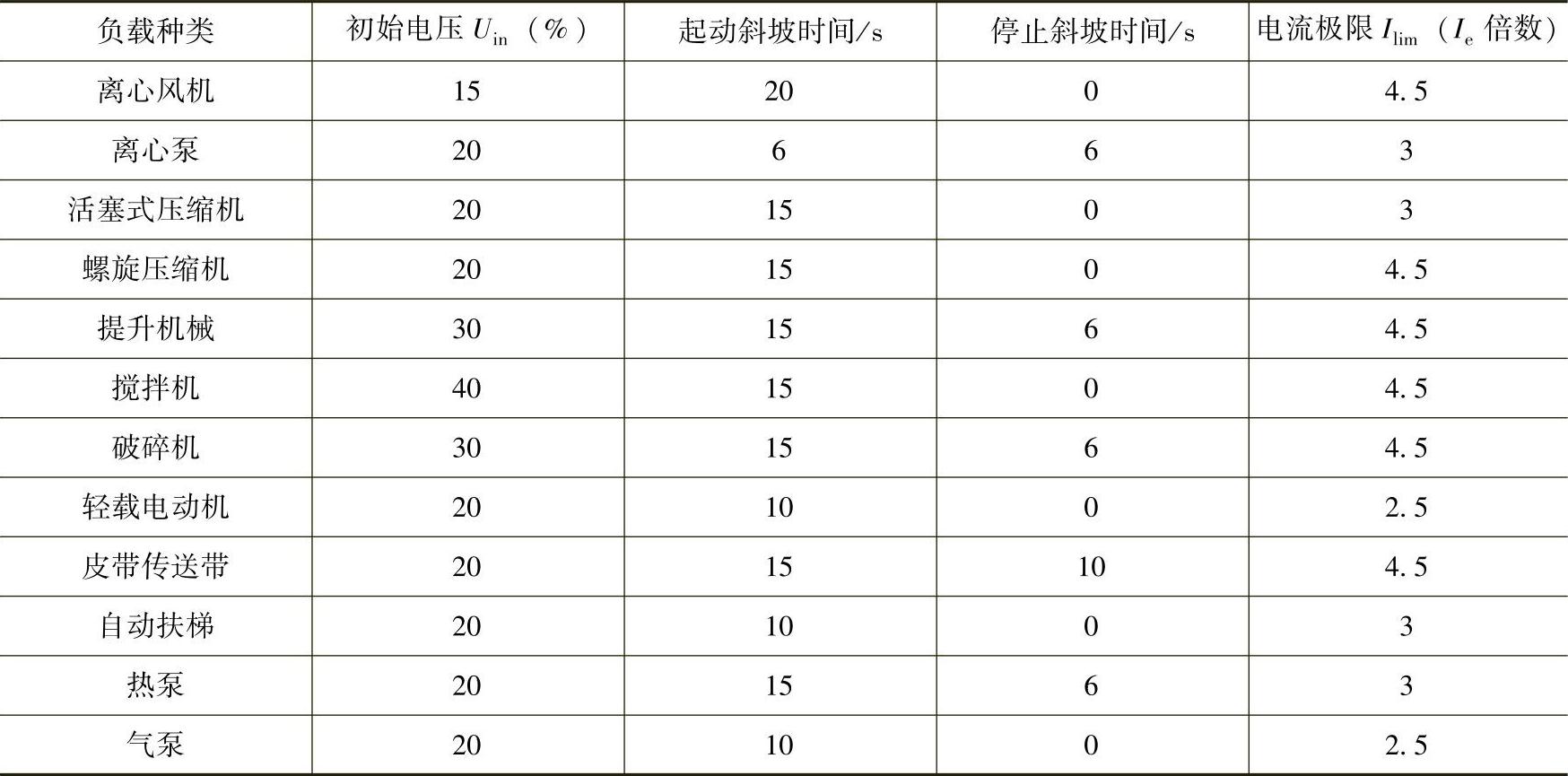
(2)软起动器参数的设置
软起动器参数的设置就是设定电动机起动、停机时的工作曲线,如图4-29所示。软起动器用于典型负载时的基本参数设置(仅供参考)见表4-1。
表4-1 软起动器用于典型负载的参数设置(仅供参考)
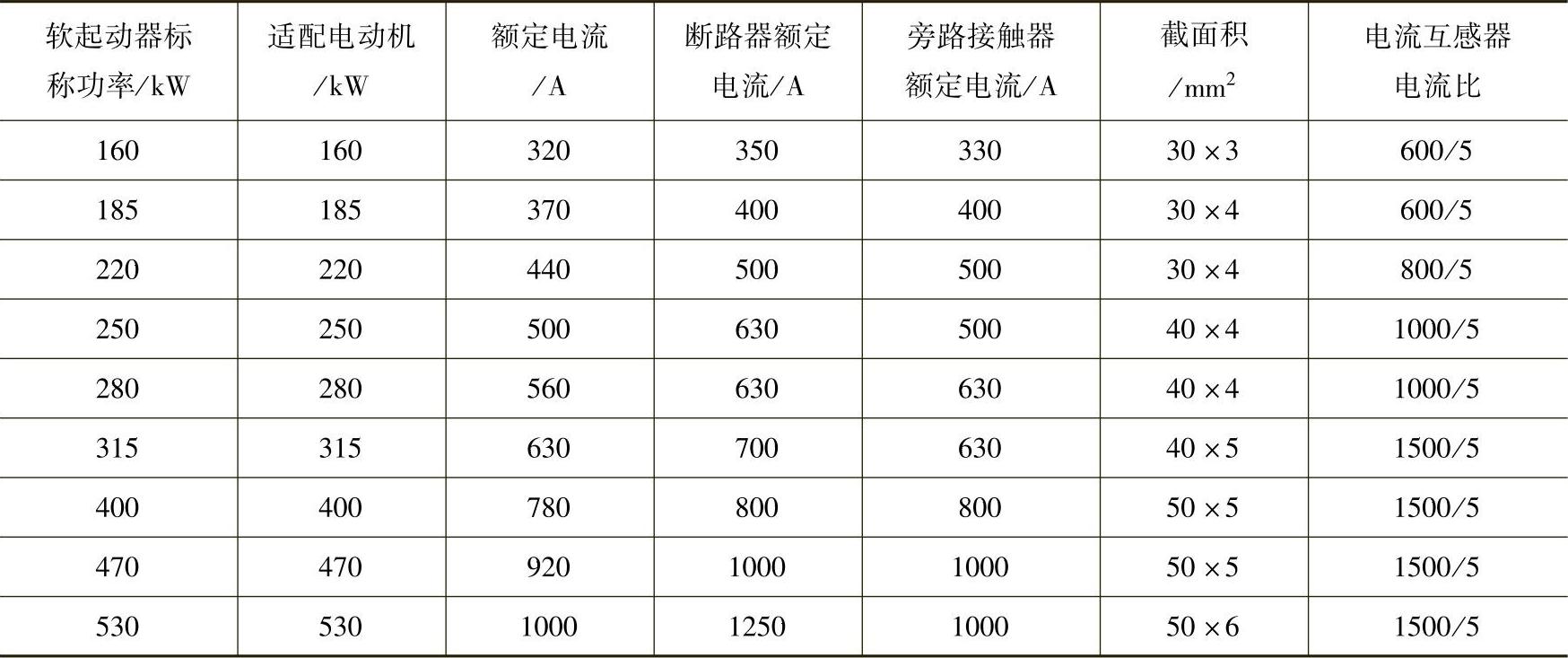
(3)软起动柜一次回路配线规格
组装软起动柜的一次回路配线规格(仅供参考)见表4-2。
表4-2 组装软起动柜的一次回路配线规格(仅供参考)

(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。