



自锁是实现控制线路长期运行的必要环节,互锁是可逆运行控制中防止短路事故的约束条件,而联锁则是实现顺序控制的链接条件。这些实质上就是逻辑上的“与”、“或”、“非”关系。例如当接触器K1动作后才允许接触器K2动作,做法是将接触器K1的常开触头串联于接触器K2的线圈回路中,从而构成逻辑“与”联锁控制关系,如图4-14所示。
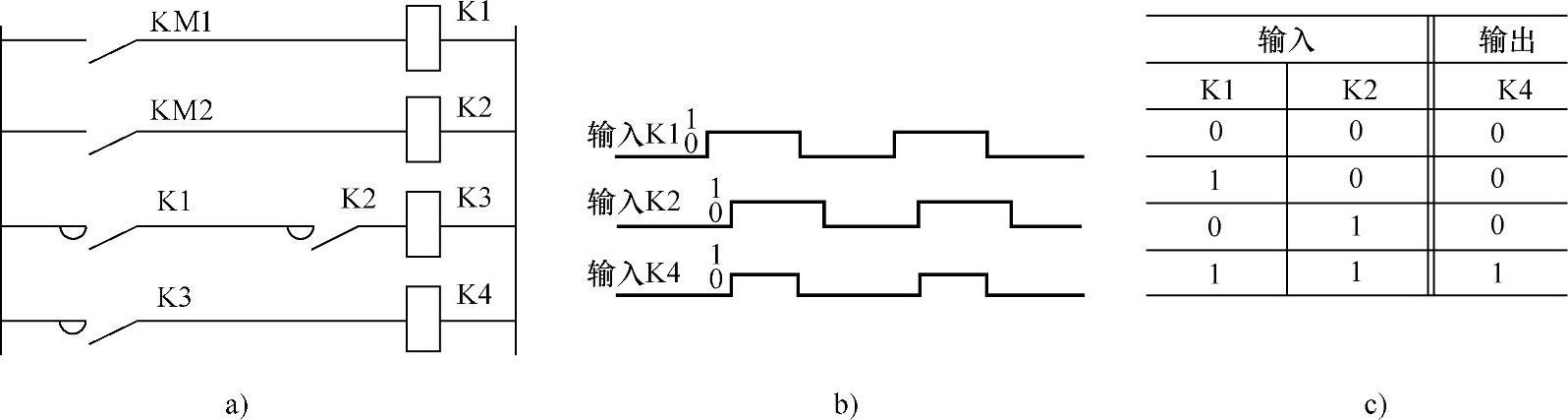
图4-14 逻辑“与”联锁控制原理图
a)电路图 b)时序图 c)真值表
图4-14中,KM1和KM2是K1和K2的动作信号,触头K1和K2是K3动作的约束条件,输出逻辑表达式为K4=K1·K2。
再如,当接触器K2动作后不允许接触器K3动作,做法是将接触器K2的常闭触头串联于接触器K3的线圈回路中,构成逻辑“非”互锁控制关系,如图4-15所示。
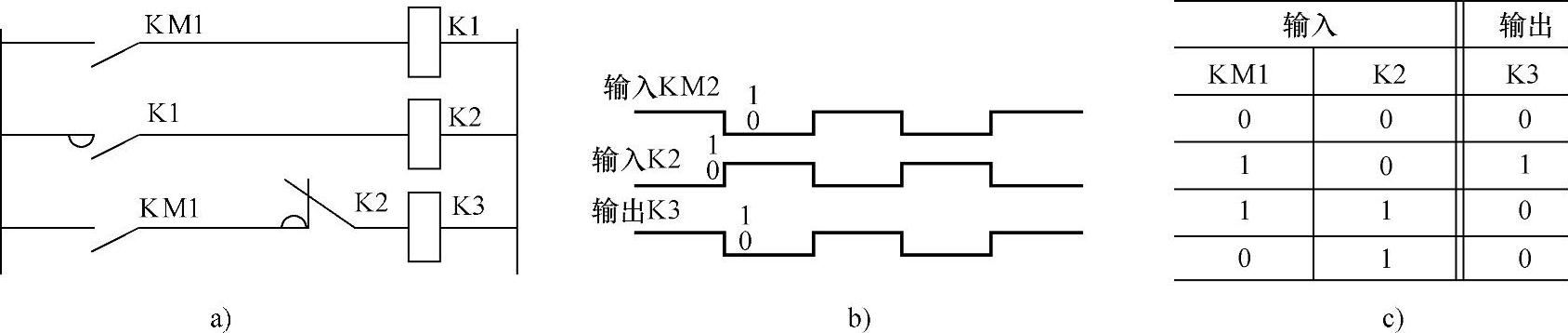
图4-15 逻辑“非”互锁控制原理图
a)电路图 b)时序图 c)真值表(https://www.xing528.com)
图4-15中,KM1是K1的动作信号,触头K1是K2动作的条件,KM2是K3的动作信号,常闭触头K2是K3动作的约束条件,输出逻辑表达式为K3=KM2·K2。
如果将两个及以上常开触头并联,只要其中一个常开触头闭合就使输出电器的线圈通电,这就构成“或”自锁控制关系,如图4-16所示。
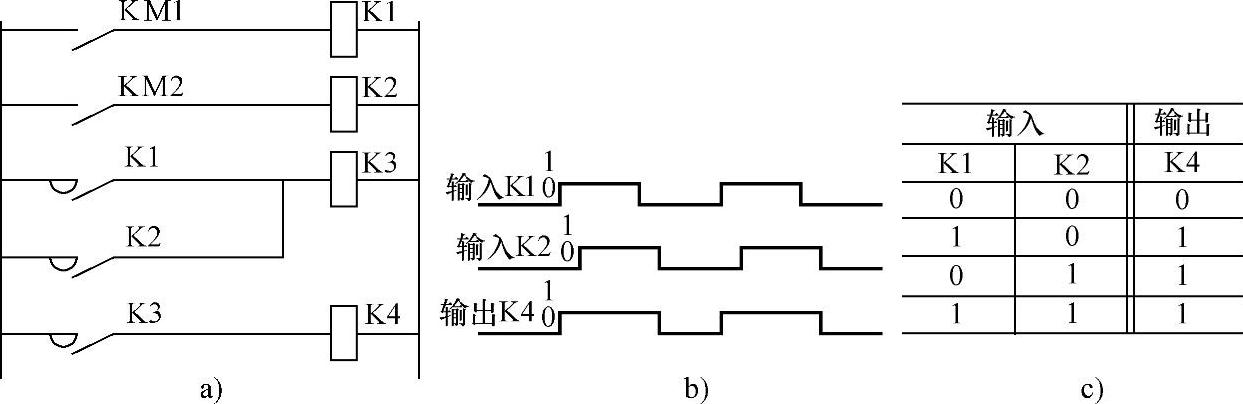
图4-16 逻辑“或”自锁控制原理图
a)电路图 b)时序图 c)真值表
图4-16中,KM1和KM2是K1和K2的动作信号,触头K1或K2是K3动作的条件,K3是中间记忆元件,输出逻辑表达式为K3=K1+K2,K4=K3。
电气控制系统中的自锁环节是实现设备长期运行的措施,互锁环节是电动机可逆控制中防止两个电器同时通电避免产生事故的保证。而联锁环节则是实现几种运动体之间的互相联系又互相制约的桥梁。这些关系实质上是逻辑上“与”、“或”、“非”的逻辑关系。例如联锁控制中,当接触器K1动作后才允许K2动作,即将K1的常开触头串联于K2的线圈电路中,这就是“与”逻辑关系。互锁及联锁控制中,当K1动作后不允许K2动作,即将K1的常闭触头串联于K2的线圈电路中,这就是“非”逻辑关系,也称互为反逻辑。自锁及多地点控制中,将两个及以上常开触头并联,只要其中一个常开触头闭合就使线圈通电,这就是“或”逻辑关系等。在工程上,这三种逻辑关系通常是组合在一起的,分析线路时应注意区分,区分的最简捷的办法是将复杂的控制线路拆分成最小单元,然后一步一步地进行逻辑组合,这样可以获得清晰的逻辑控制关系和明确的线路工作原理。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。