



工厂中的各种生产机械通常具有上下、左右、前后、往返等具有方向的运动控制,这是通过控制电动机的正转或反转实现的,称为“可逆”控制。如电梯的上下运行、起重机和行车吊钩的上升与下降、机床工作台的前进与后退及主轴的正转与反转等运动的控制,就是通过“可逆”控制实现的。同一机械的上下、左右、前后、往返等的两个运动方向是唯一的、互斥的、互为反逻辑,即任意时刻只可能有一个方向的运动。由交流电动机工作原理可知,若将接至三相异步电动机的三相电源中的任意两相对调,即可实现三相异步电动机反向旋转。所以,我们可用两个异步电动机的起停电路组合而成,即用两个方向相反的单向控制线路组合而成可逆控制线路,如图4-10所示。
由图4-10可见,主电路中K1、K2所控制的电源相序相反,因而可实现电动机反向运行。由控制电路可明显地看到,它只是在每个起停电路中分别串入了常闭辅助触头K2和K1。如果不考虑串入的常闭辅助触头K1、K2,其原理不言而喻。但是,假设不串入常闭辅助触头K1、K2,而SB2和SB3又被同时按下,就会造成短路事故,这是绝对不允许的。现在再来分析串入的常闭辅助触头K1、K2的作用,K1、K2分别是两个接触器K1和K2的常闭辅助触头,当一个接触器通电时,如K1,其常闭辅助触头K1断开接触器K2的线圈电路,相反,当接触器K2通电时,其常闭辅助触头K2断开接触器K1的线圈电路,所以接触器不会同时带电闭合,我们称这种利用两个接触器(或继电器)的辅助触头互相约束的控制方法为“互锁”控制环节,而起互锁作用的触头叫做互锁触头。由此可见,互锁环节是可逆控制线路中防止电源短路的保证。由图4-10可写出可逆控制与互锁控制线路的逻辑函数式为

对应于梯形图的逻辑函数式:

梯形图逻辑由编程软元件线圈Y1和Y2及其常开/常闭触头Y1和Y2、常开触点X1、X2和常闭触头X0组成。线圈Y1和Y2的状态由与其相连的梯形图决定,常闭触头X0是常开触头X1和X2的约束条件;常闭触头Y1和Y2是互锁条件,它使K1、K2在任何时刻均不能同时得电。图4-10的逻辑关系可推广到对2台电动机的控制,这2台电动机在任何时刻均不能同时起停,只能有一台在工作。
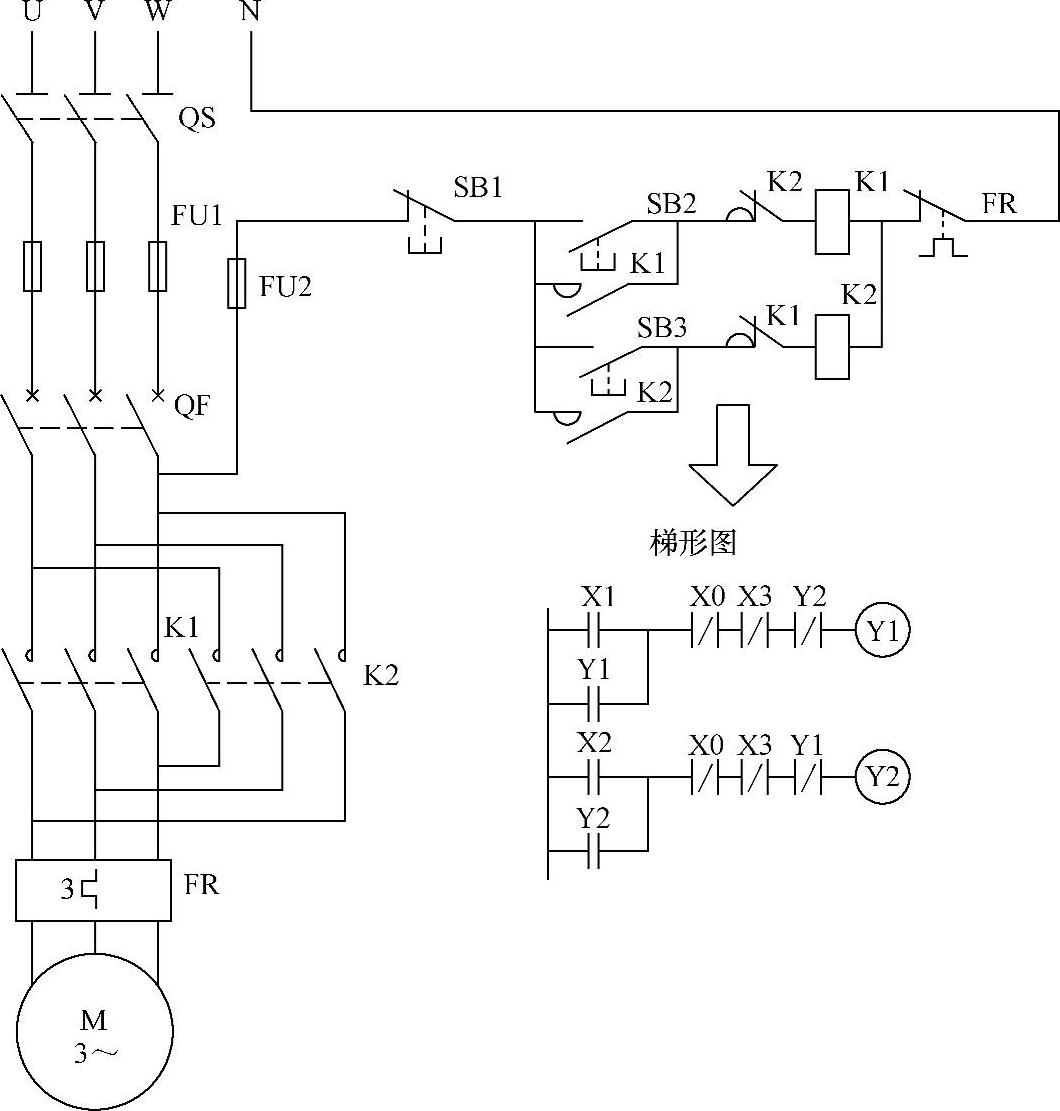
图4-10 三相异步电动机可逆控制线路
图4-11是一个2选1控制电路,KM1和KM2两个输入中,先选者优先,同时另一个会被禁止。
图4-11中,K3和K4两个接触器分别由接触器K4的常闭辅助触头K4和接触器K3的常闭辅助触头K3互锁,同时常闭辅助触头K4和K3又是接触器K1和K2的常开辅助触头K1和K2的约束条件,由此可写出逻辑函数式如下,
 (https://www.xing528.com)
(https://www.xing528.com)
既相互联系又互相制约,并能起到顺序控制作用的“互锁”控制称为顺序联锁控制。其控制原则是,要求甲接触器动作时,乙接触器不能动作,则需将甲接触器的常闭触头串在乙接触器的线圈电路中;要求甲接触器动作后乙接触器方能动作,则需将甲接触器的常开触头串在乙接触器的线圈电路中,以此类推,可推广到n个需相互顺序联锁控制的对象。
对于较复杂的时序逻辑电路,为了区分各个动作程序的状态,以达到顺序动作的目的,设计时往往需要设置中间记忆元件,记忆输入信号的变化,如图4-11中的K1和K2即是中间记忆元件,中间记忆元件一般采用中间继电器。
图4-12是一种利用互锁控制的自动往返循环控制线路,电路的原理可适用于各种控制进给运动到预定点后自动停止的限位控制保护等,其应用相当广泛。
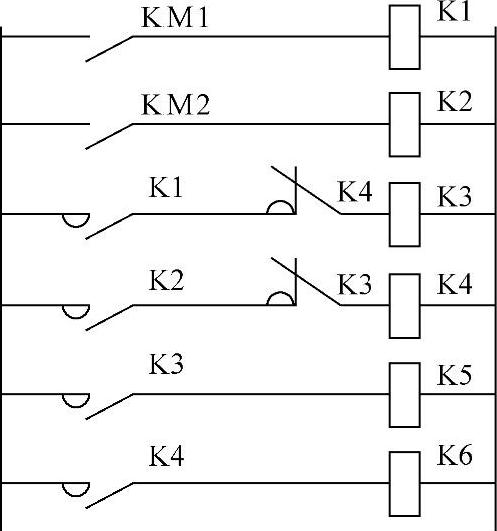
图4-11 2选1控制电路

图4-12 自动往复循环控制线路
图4-12所示的控制线路是采用行程开关来实现的,当装于生产机械运动部件上的撞块压合行程开关时,行程开关的触头动作,从而实现电路的切换,以达到自动往复控制的目的,也可以采用非接触式接近开关代替行程开关。限位开关SQ1放在左端需要反向的位置,而SQ2放在右端需要反向的位置,机械挡铁装在运动部件上。利用正向或反向起动按钮启动,如按正转按钮SB2,接触器K1通电吸合并自锁,电动机作正向旋转带动机械运动部件左移,当运动部件移至左端并碰到SQ1时,将SQ1压下,其常闭触头断开,切断接触器K1线圈电路,同时其常开触头闭合,接通反转接触器K2线圈电路,此时电动机由正向旋转变为反向旋转,带动运动部件向右移动,直到压下SQ2限位开关电动机由反转又变成正转,这样,驱动运动部件的运动是往复循环运动。运动部件每经过一个自动往复循环,电动机要进行两次反接制动过程,将出现较大的反接制动电流和机械冲击。因此,这种线路只适用于电动机容量较小、循环周期较长、电动机转轴具有足够刚性的拖动系统中。另外,在选择接触器容量时,应比一般情况下选择的容量大一些。
一些生产机械的运动部件的行程、超程及相对位置,往往要求限制在一定范围内,如直线运动切削机床、升降机械等需要有限位控制,有些生产机械工作台的自动往复运动需要有行程限位等。如起重设备的左、右,上、下,前、后运动行程都必须有适当的位置保护,否则就可能损坏生产机械并造成人身事故,这类保护称为位置保护。位置保护、限位控制和行程限位在控制原理上是一致的,可以采用限位开关、干簧继电器、接近开关等电器元件构成控制电路,当运动部件到达设定位置时,开关动作,其常闭触头通常串联在接触器控制电路中,因常闭触头打开而使接触器释放,于是运动部件停止运行。因此,可根据图4-12所示的控制原理举一反三,设计出许多控制方案。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。