



15.4.4.1 振荡性能
如图15-101所示,调节对象与调节共同组成了调节回路。调节器在干扰量z或额定值(控制量w)发生改变时参入到调节回路中。对此,调节器根据是发生了干扰还是控制量发生了变化的不同情况,其所起的作用也不相同。当发生干扰时,调节器出现坏的调节状态,而在一个控制量变化时,则出现好的调节状态。调节器对调节对象适应性好,如图15-102所示,则调节量X的振荡迅速变缓合。
好的调节特征:
1)过冲宽度xm小(图15-102a)。
2)调节时间tan短。
3)调节时间taus短。
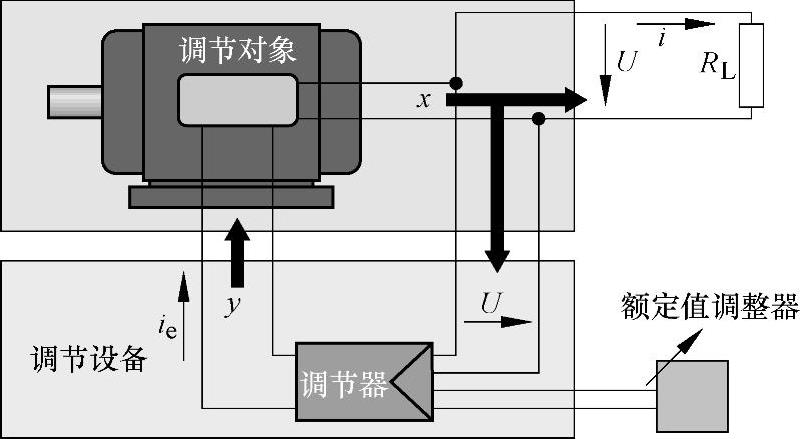
图15-101 调节回路
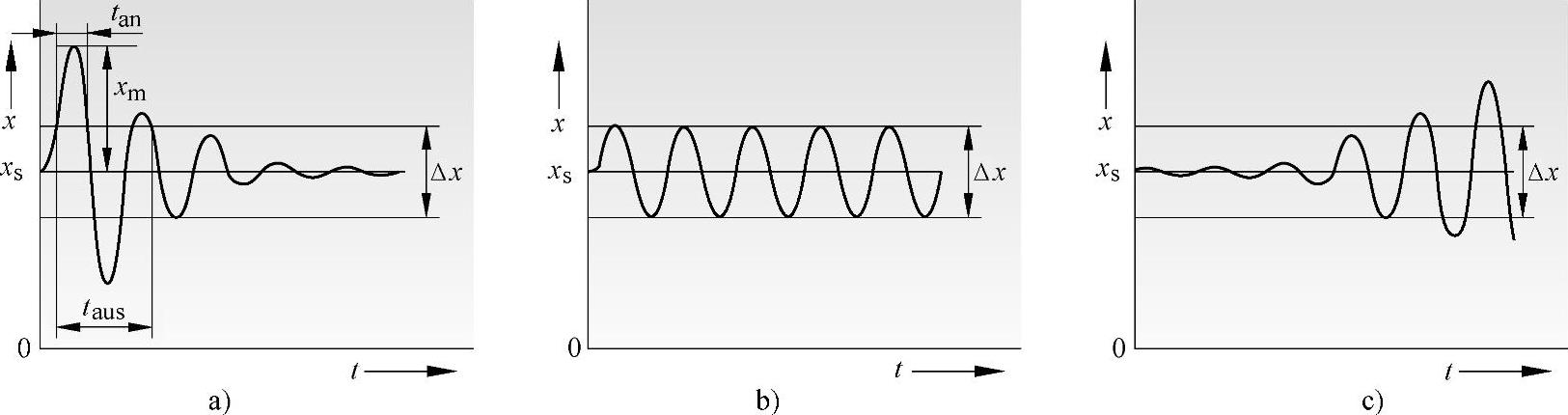
图15-102 调节回路特性
a)稳定的调节回路 b)调节回路处在稳定限度 c)不稳的调节回路 xS—额定值 xm—过冲宽度 tan—调节时间 taus—调节时间 Δx—公差范围
•过冲宽度xm:干扰开始后的第一个振幅。
•调节时间tan:干扰开始与第一次达到公差范围Δx之间的持续时间。
•调节时间taus:干扰开始与调节量持久停留在公差范围Δx之间的持续时间。
没有调节系统的一般有约束力的质量标志,这与特殊的调节任务有关。对于一台车床的调节,因为许多零部件在转动,所以允许不给过冲,因此就可避免存在调节时间tan和taus。
15.4.4.2 调节器选择
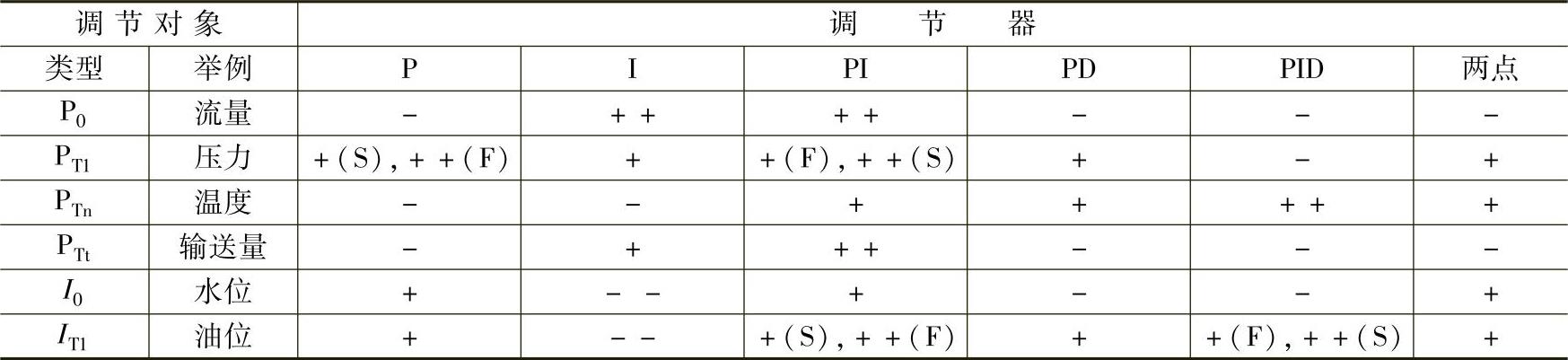
在建立一个调节回路时要规定调节对象。为了稳定而快速地达到控制,应选择合适的调节器(表15-14)。
表15-14 已知调节对象时调节器的选择
 (https://www.xing528.com)
(https://www.xing528.com)
注:--—不稳定;-—不适合;+—适合;++—适合良;(F)—控制时;(S)—干扰时。
15.4.4.3 调节器的调整
如果所有的组成部分(调节对象、测量装置、控制装置及调节器)彼此相匹配,则调节回路便会稳定的工作。调节对象、测量装置与调整装置的性能是固定的并且多为已知的,因而只有调节器可以实现调整。一个可用的调节器调整证明是有困难的又是拖延时间的。对于熟练者是通过试验确定能得到良好调节效果的调节条件(表15-15)。
表15-15 调节器调整的方法

(1)按Chien/Hornes/Reswick法 使用表15-16中的方法的先决条件是调节对象的延迟时间Tu和平衡时间Tg已知。属于调节对象的还有控制装置和测量装置,因此必须要用控制装置和测量装置确定Tu和Tg。
表15-16 PTn调节对象按Chien/Hornes/Reswick法的调节器调整值
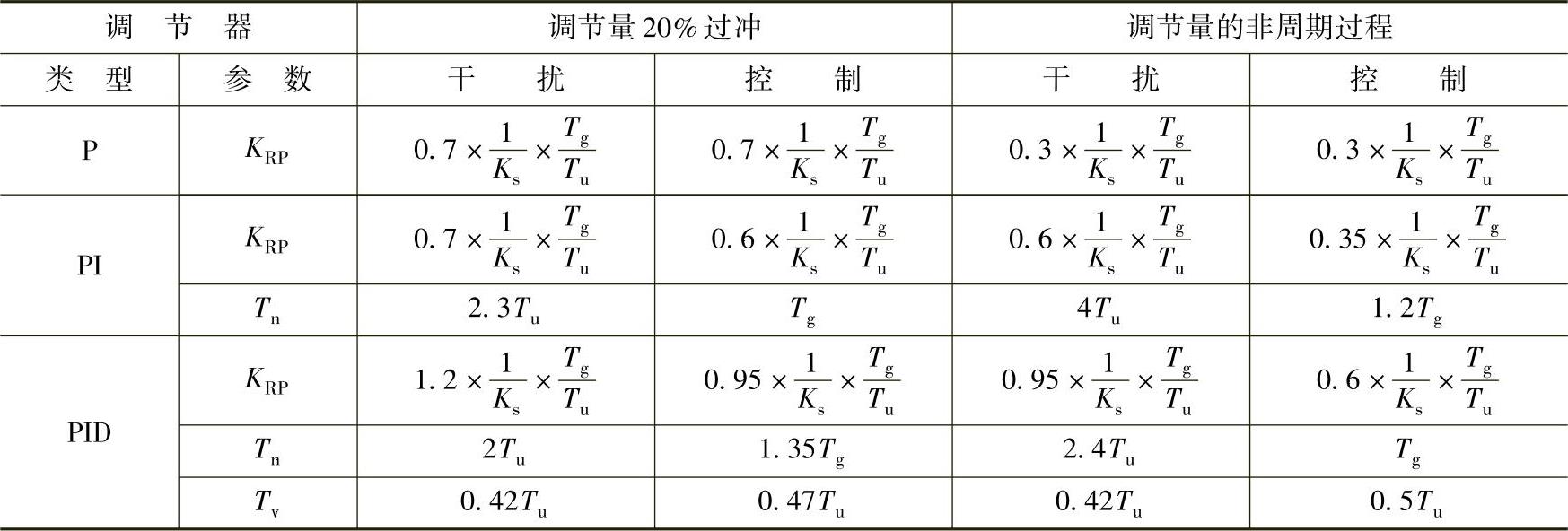
注:KRP—调节器比例系数;Ks—调节对象比例系数;Tn—重调时间;Tv—提前时间;Tu—延迟时间;Tg—平衡时间有延迟时间的调节对象,在对于Tu的公式中脉冲实际延迟时间Tu使用延迟时间TT;无平衡调节对象,在相应的公式中使用 代替
代替 。
。
例题:
要对图15-103所示的退火炉进行调温。已知调节对象的延迟时间Tu=60s、平衡时间Tg=600s、比例系数Ks=10K/A。调节量允许有20%的过冲。请利用表15-16计算把干扰调整好的PID调节器的调整值KPR、Tn和Tv。
解:
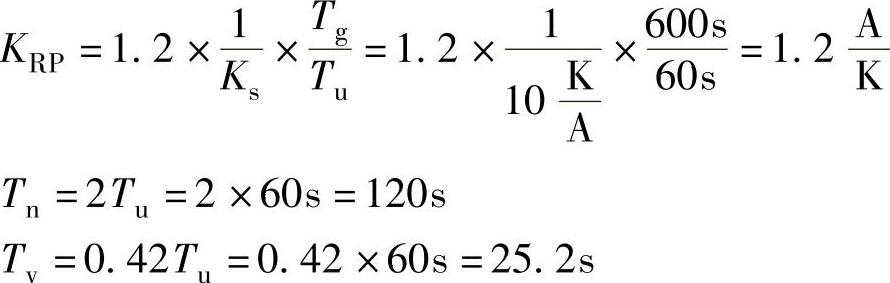
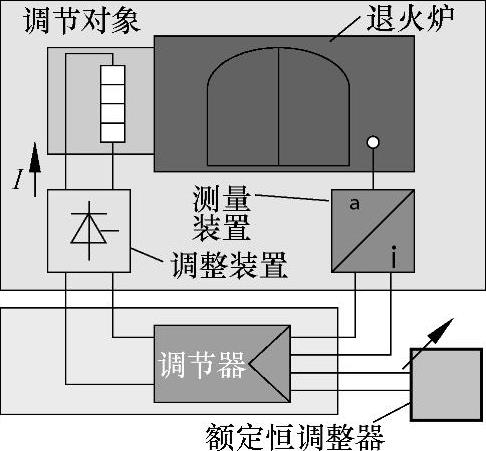
图15-103 退火炉的调温系统
(2)按Ziegler/Nichols法 当不知道调节对象的延迟时间Tu和平衡时间Tg时,则使用表15-17中的Ziegler/Nichols法。首先是作为一个纯P调节器(对于通用调节器把Tn调到∞,把Tv调到0),然后提高比例系数并直到调节量无衰减振荡为止。这种KRP的调整称为临界比例系数KRP0。然后测量调节量的无衰减振荡周期,此值是临界振荡周期T0,为了获得调整值KRP、Tn和Tv,则应按所选择的调节器把所发现的量乘以表15-17所列的值。
表15-17 按Ziegler/Nichols法的调节器调整值

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。