



提要:调节器
•连续调节器:
—P调节器
—I调节器
—PI调节器
—PD调节器
—PID调节器
•不连续调节器:
—双点调节器
—三点调节器
调节器等于具有控制量w的调节量x。在出现一个调差e时,则在其输出调节参数y发生变化。
调节分为提要中所列的连续调节器和不连续调节器。不连续调节器的调节参数是跳跃式变化(不连续),而连续调节器则是连续变化。
15.4.3.1 不连续调节器
(1)两点调节器 一个两点调节器的调节参数y只有两个可能值y=0(AUS)和y=yh(EIN),如图15-79所示。
例题:一个电加热烤箱,其加热电流是作为调节参数y断开与接通。温度(x)不是准确地保持在额定值上,而是绕平均值x摆动。调节量x的最大值与最小值之间的差是图15-79所示的摆幅Δx。调节器首先在一个高温(x0)时断开加热电流,然后在一个低温(xu)时再接通(图15-79和图15-80)。上响应门限值x0与下响应门限值之差标注为调节装置的自动控制器的差值xsd或滞后(图15-79)。
xsd小⇒摆幅Δx小⇒转换频率高。
对于如接触器一类的机械开关转换频率高会导致磨损大。
如在一个温度调节对象中,其热只是缓慢地传播,所以在断开调节参数后温度仍有一段时间还在升高,并且在重新接通后仍在继续降温,在调节对象中出现一个滞后时间Tu。
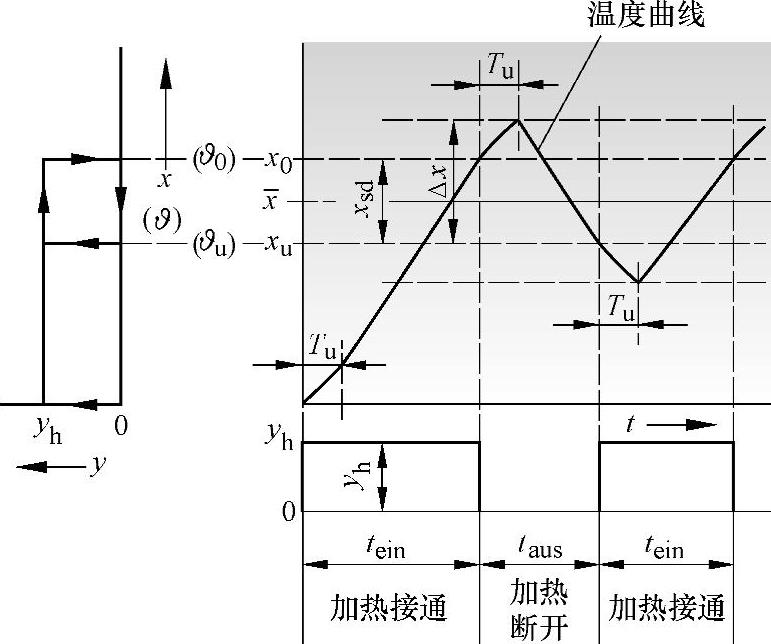
图15-79 两点调节装置的调节量与调节参数
图15-80 两点调节器线路图
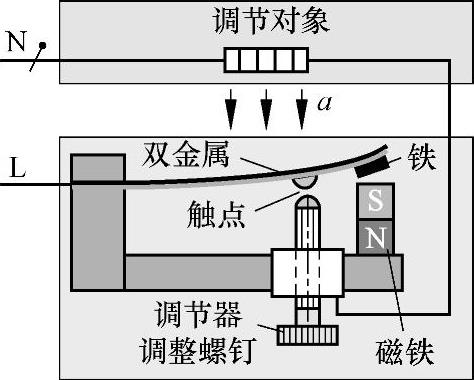
图15-81 双金属温度传感器
滞后时间Tu增大了调节对象的摆幅Δx并减小了转换频率。
(2)双金属温度传感器
例题:图15-81所示的双金属温度传感器是一种两点调节器。调节器有一个调节温度的双金属条。在温度发生变化时,双金属条弯曲,并由此打开或闭合触点。为了避免触点过高的烧损,则必须使触点以冲击方式打开或闭合。对此可以通过有预紧力的触点弹簧或通过双金属端头的铁块达到防止高触点烧损的目的。在温度下降时,铁块被一块永磁铁在一个规定的距离冲击式的吸引。在温度升高时,触点保持闭合,直至双金属的预紧力大于磁铁的自持力,然后触点冲击式打开。额定值通过调整螺钉调整,即改变至双金属的触点距离。
(3)三点调节器 如图15-82所示,三点调节器可以有3个不同的调节参数y值。图15-83b所示为其线路图。
三点调节器3个调节参数的举例:
•1.AUS,2.级1(y2),3.级2(y3),(图15-83a)
•1.加热(+yh),2.AUS(y=0),3.冷却(-yh),(图15-84)
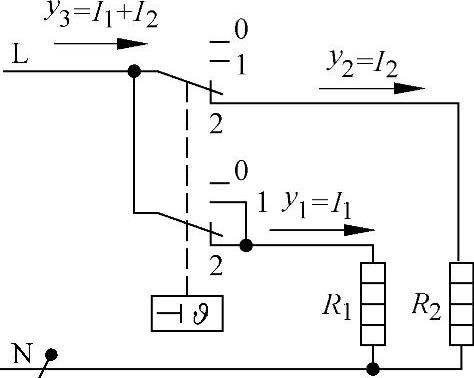
图15-82 三点调节装置调节回路
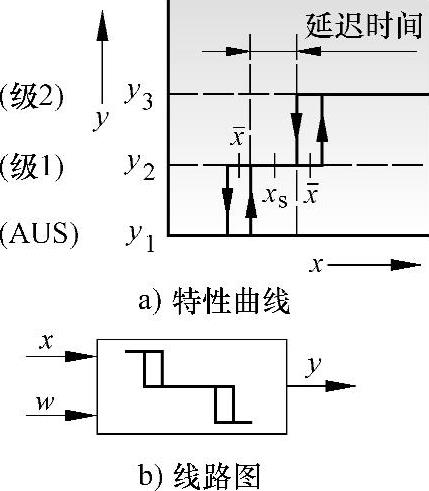
图15-83 三点调节器特性曲线与线路图
例题:一台回火炉,如图15-82所示,有一个大功率加热体R1和一个小功率加热体R2。在工件退火的过程中,R1连续工作,调节参数为y2。在需热量大时接通R2,调节参数增加到y3。如图15-83a所示,调节参数在y2与y3之间摆动。调节参数平均值x保持在额定值xs以下。在低需热量时只由R1提升温度,调节器断开此加热体。调节参数在y2与y1之间摆动。调节参数平均值x保持在额定值以上。
三点调节器相对于两点调节器有以下优点:
•摆幅Δx小。
•控制功率变化量Δy小。
三点调节器可用于空气调节设备。如图15-84所示,调节参数为+yh(加热),y=0(AUS)和-yh(冷风)。一个这样的三点调节器对一台电动机的作用是可使其逆时针转动、断开和顺时针转动。此电动机驱动如同一个调整阀门来调节流量,不是多级的而是连续地改变调节参数,这样的调节器称为三点步进式调节器。
15.4.3.2 连续调节器
(1)P调节器(比例调节器)
工作原理:图15-85所示的液位调节系统表示出了P调节器的状态。液位提高,则浮子升高并通过杠杆关闭阀门。当液位提高到xe值时,阀门完全关闭,并当液位降到xa时,阀门完全打开。在xa与xe之间的区域内,阀门位置的变化量Δy仅与液位变化量Δx成比例。
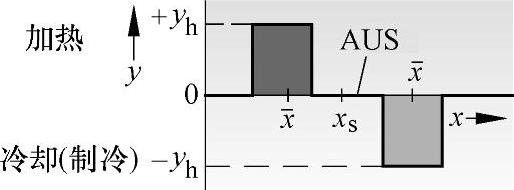
图15-84 具有中点位置0三点调节器特性曲线
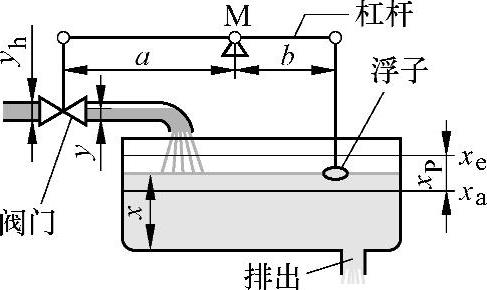
图15-85 具有P调节器的液位调节系统
P调节器的调节参数变化量Δy仅与调差e的变化成比例。
向左移动杠杆旋转点M,液位应升高,此时阀门完全关闭,并且在液位下降很大时,阀门才完全打开。这样就扩大了xa与xe之间的区域。向右移动旋转点,则xa与xe之间的区域减少。xe与xa之间的差称为比例区域Xp。
比例区域越小,则在出现调差时的调节参数的变化越大。
图15-86a所示的调节器特性曲线描述了一个P调节器的特性。在P区域下面的值xa是调节参数最大值(yh),而在上面的值xe是调节参数0。如图15-86a所示,一个P调节器的输出变化量Δy与输入变化量Δx的比值称为调节器的比例系数KRP。图15-86b所示为P调节器线路图。
比例系数KRP越大,则比例区域XP越小。
动态特性:如调节对象一样,为了研究调节器的动态特性则采用了阶跃响应特性。对此冲击式的变化调节器输入量e并观察输出量y的现时过程曲线。在液位调节范例中,如图15-87所示,调节参数y的变化并不延迟而是与调差e成比例。由比例系数KRP和调差e计算调节参数变化量Δy。
优、缺点:R调节器的主要优点是快速,其缺点是当调节量完全达到额定值时,到目前为止这种调节器是不可调节的,也就是说P调节器有一个剩余调差ep。图15-88中所示的P调节器特性曲线是描述如直流发电机的P调节对象的特性曲线。调节对象特性曲线z0是正常运行的特性曲线,工作点p0用调节量额定值xs调整。撤离大电流(z1),特性曲线移动,并且把新的工作点P1调到坐标x1与y1的交点上。xs与x1的差称为剩余调差ep。
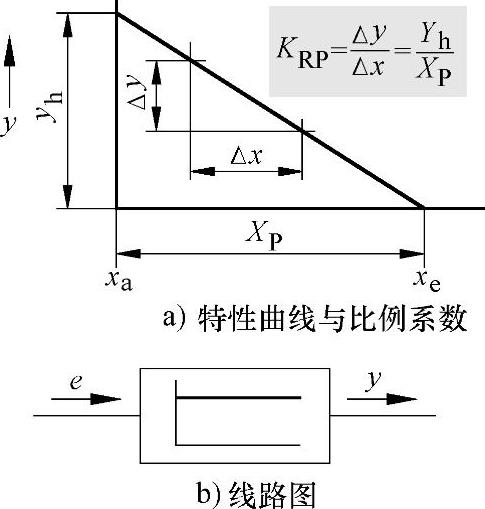
图15-86 P调节器的特性曲线、比例系数与线路图
KRP—调节器比例系数 △y—调节参数变化量 △x—调节量变化量 Yh—调整范围 Xp—比例区域
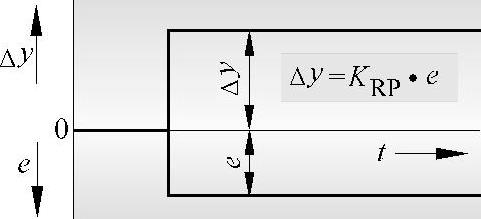
图15-87 P调节器的阶跃响应特性
△y—调节参数变化量 KRP—调节器比例系数 e—调差

图15-88 一个P调节对象的P调节器特性曲线
P调节器是一种快速但有剩余调差的调节器,其KRP越大,则剩余调差ep越小。
(2)I调节器(积分调节器)
工作原理:改变图15-89所示的液位h(x),浮子移动电位器上的滑触点,伺服电动机旋转,阀门的开度(y)发生变化,于是有或多或少的水流进容器。如果调差e大,则电动机电压高、电动机转速快。调节量越靠近其额定值,则调节参数变化越缓慢。(https://www.xing528.com)
I调节器的调节参数变化速度vy与调差e成比例。
动态特性:在一个恒定的调差e时,如图15-90所示,调节参数的变化速度为一个定值。
调节在遍历整个调节范围Yh所需要的时间称为积分时间TI。积分常数KRI是调节参数y变化速度的度量。
优、缺点:对直流发电机施加电压的时间是达到额定值为止,I调节器也对干扰进行调节。
I调节器无剩余调差,但缓慢。
(3)PI调节器
工作原理:如图15-91所示,液位h(x)的改变是浮子通过杠杆改变阀门开度(y),控制电动机直至达到额定值而实现的。
动态特性:图15-92a所示的阶跃响应特性标注出一个PI调节器动态特性。调节参数变化量ΔyPI由P部分ΔyP和I部分ΔyI组成。在调差跃迁后,调节参数的P部分ΔyP立即变化,调节参数的I部分ΔyI呈线性提高并加到ΔyP上。
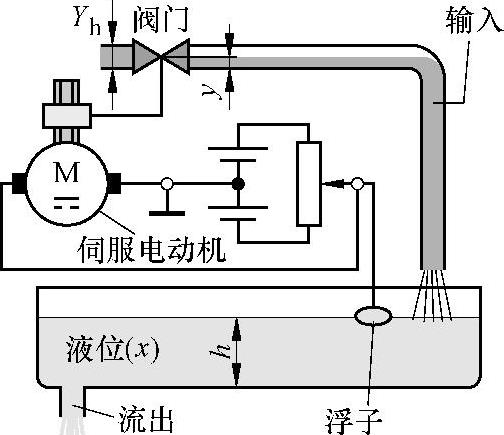
图15-89 具有I调节器的液位调节系统
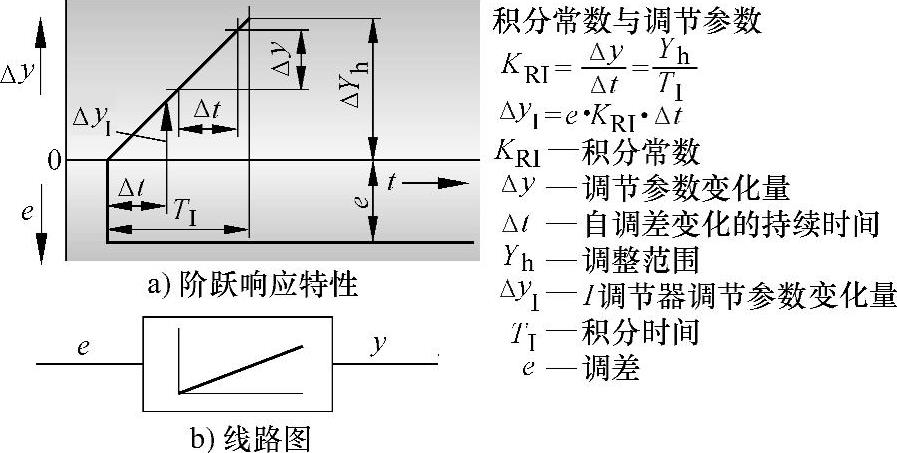
图15-90 I调节器的阶跃响应特性、线路图、积分常数与调节参数变化量
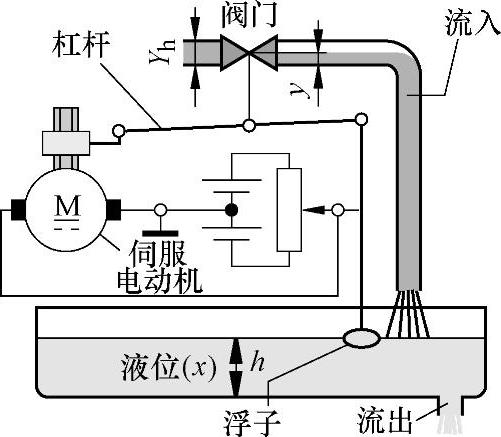
图15-91 具有PI调节器的液位调节系统
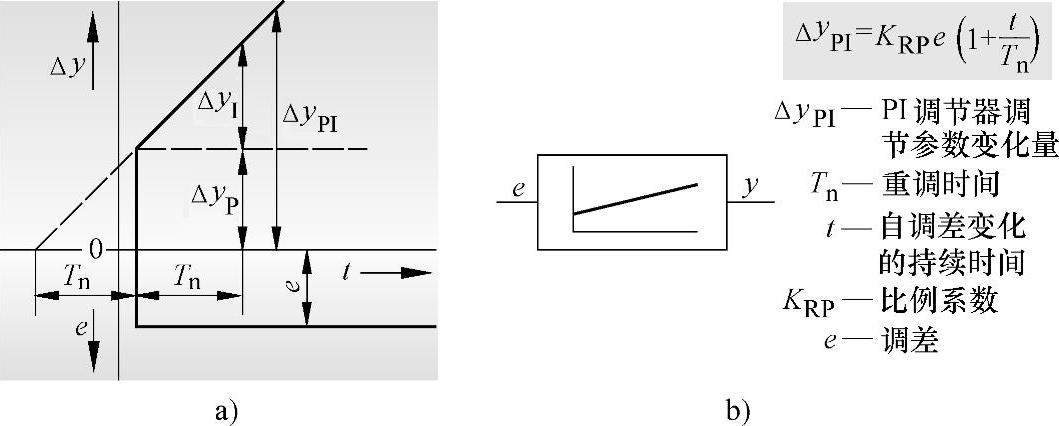
图15-92 用于PI调节器调节参数变化量的阶跃响应特性、线路图与公式
a)阶跃响应特性 b)线路图与公式
如图15-92所示,在一个跃变后从e消失到ΔyI正好等于ΔyP的时间称为重调时间Tn。
重调时间越短,则对I部分的影响越大。
如图15-92所示,延长I部分的斜率线使之与t坐标轴相交,便可求得重调时间Tn。
优、缺点:PI调节器消除了P调节器和I调节器的缺点。
PI调节器不仅快速,而且还无剩余调差。
(4)D调节器(差动调节器)
工作原理:对于图15-93所示的液位调节系统,冲击式的变更浮子位置(调差e),液压减振器偏转。弹簧拉液压减振器和阀门,若调差仍然存在,则又返回到其起始位置。
动态特性:对于图15-94所示的阶跃响应特性,如果调差变化不大,则调节参数立即跳到最大值,然后立即返回零。
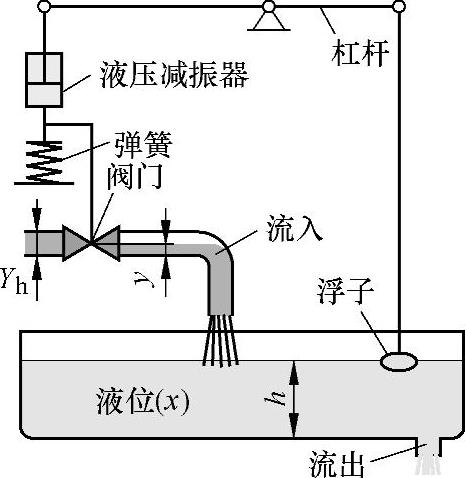
图15-93 具有D调节器的液位调节系统
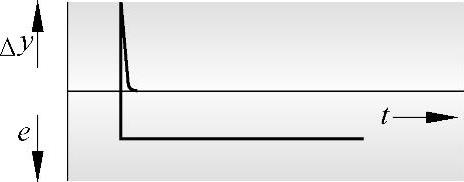
图15-94 D调节器的阶跃响应特性
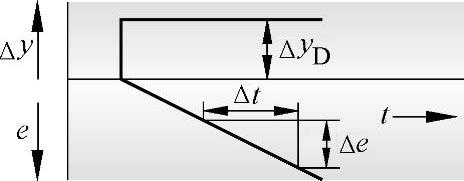
图15-95 D调节器的阶跃响应
在图15-95所示的阶跃响应时,均匀地提高调差e并观察调节参数变化量ΔyD。如图15-96所示,ΔyD跳跃到一个恒定值。调差变化越快,则调节参数变化量Δy就越大。图15-96给出了一个暖气调节系统的阀门开度(y)与调差e的依赖关系。在a区,温度降低,阀门(y)打开。在b区,偏移恒定,阀门返向起始位置。在c区,温度升高,此时尽管仍未达到额定温度,但阀门已经关闭。
优、缺点:
D调节器是唯一可无干扰调节的调节器,它只对调差变化速度起作用。
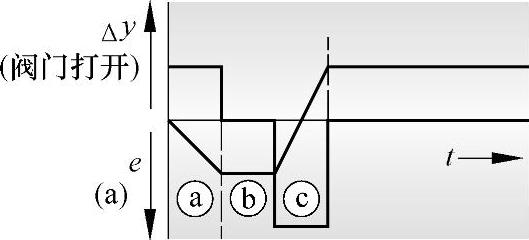
图15-96 D调节器的调节 参数变化量曲线
(5)PD调节器
工作原理:在图15-97所示的液位调节系统中,跳跃式变化浮子位置(调差e),液压减振器偏转。弹簧拉减振器并在调差仍然存在时又返回到起始位置。但是,随固定在弹簧上的下杠杆之后是成比例的调差,并由此构成了调节器的P部分。
动态特性:如图15-98所示,当调差e恒定提高时,调节参数变化量的D部分ΔyD跳升到一个恒定值。在调节参数变化量P部分ΔyP的后面是成比例的调压,并相加到ΔyD上。
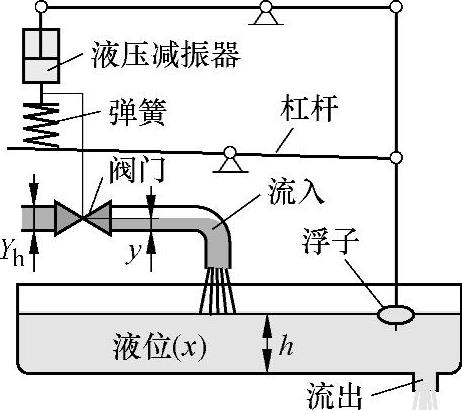
图15-97 具有PD调节器的液位调节系统
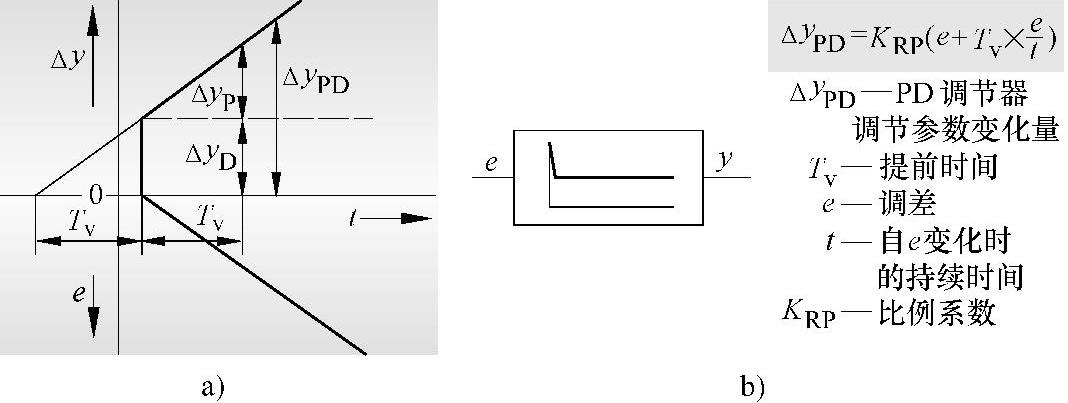
图15-98 用于PD调节器调节参数变化量ΔyPD的阶跃响应、线路图与公式
a)阶跃响应 b)线路图与公式
 在e均匀变化消失时到ΔyP正好等于ΔyD的时间称为提前时间TV。
在e均匀变化消失时到ΔyP正好等于ΔyD的时间称为提前时间TV。
提前时间TV,如图15-98所示,可通过延长P部分斜率并使之与时间t坐标轴相交来求得。
提前时间越长,则对D部分的影响就越大。
优、缺点:
PD调节器D部分能阻止用尝试的一个调节量的过冲越过额定值。P部分ΔyP反应快,但引起一个剩余调差。
(6)PID调节器
工作原理:为了一个伺服驱动而对图15-97所示的PD调节器进行了补充,于是便得到图15-99所示的PID调节器。
动态特性:图15-100所示的P部分不延迟地对调差起作用,I部分阻止剩余调差,而D部分则对调差变化速度起作用。图15-100a所示为PID调节的阶跃响应特性。
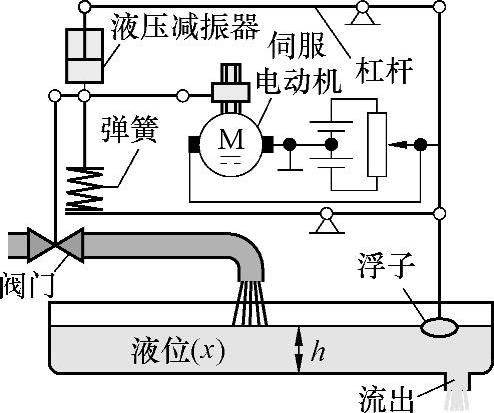
图15-99 具有PID调节器的液位调节系统
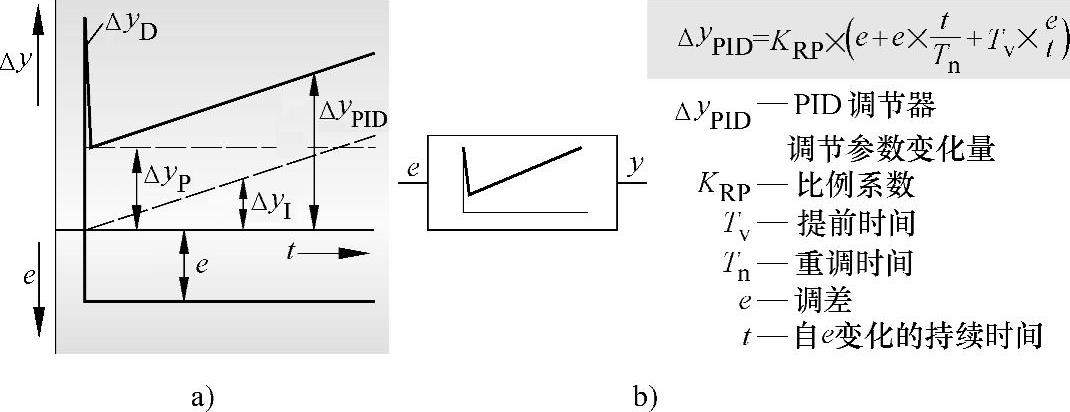
图15-100 PID调节器调节参数用阶跃响应特性、线路图与公式
a)阶跃响应特性 b)线路图与公式
通过提高KRP和TV以及减小Tn来提高调节参数变化量ΔyPID。
优、缺点:
PID调节器快速,作用与调节量过冲相反并且无残留调整误差。PID调节器用于PTn调节对象,但调整困难。
作为调节器的运算放大器,用运算放大器可以使调节器复制容易(表15-13)。
表15-13 作为调节器的运算放大器
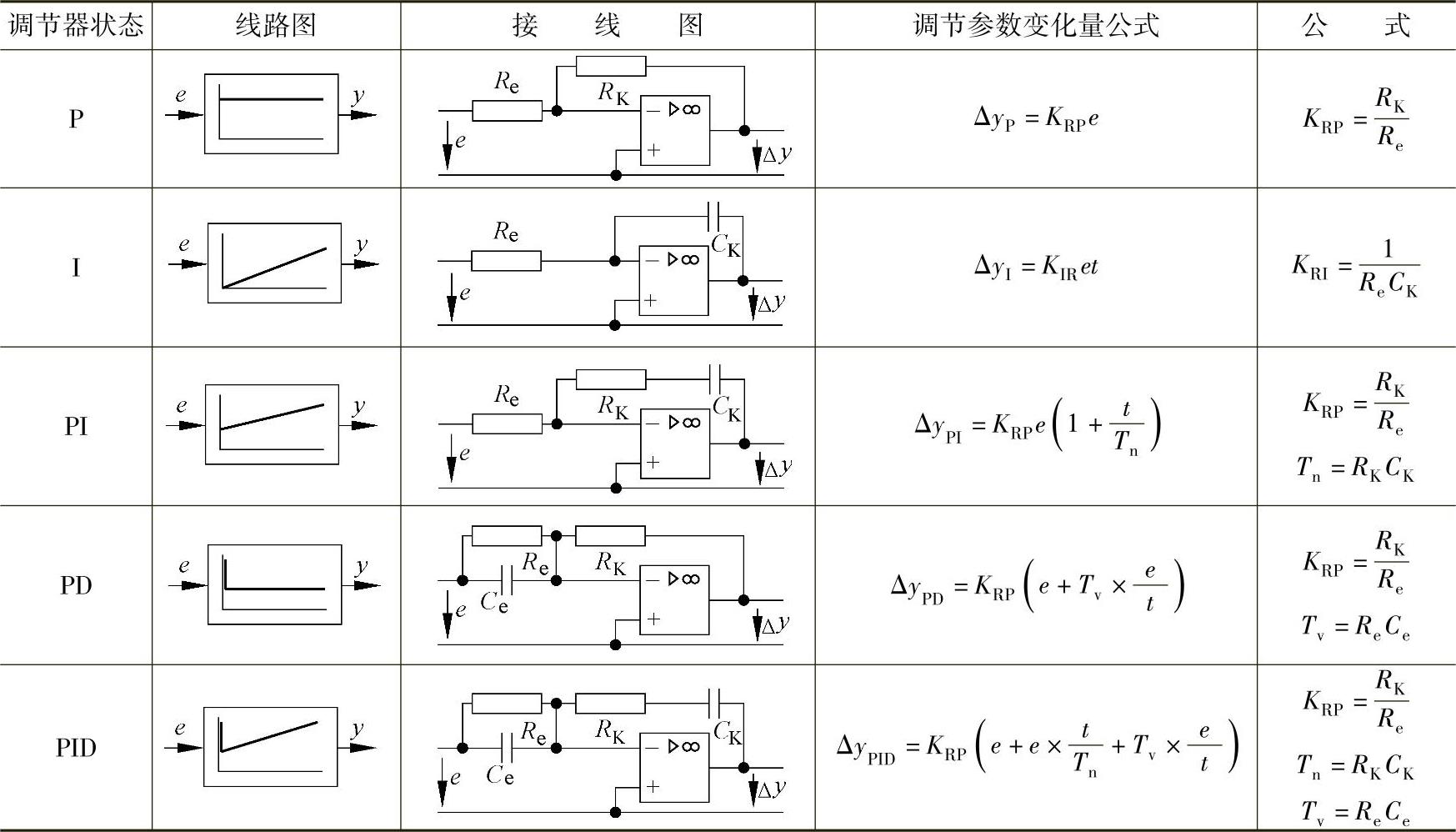
注:ΔyP—P调节参数变化量;ΔyI—I调节参数变化量;ΔyPI—PI调节参数变化量;ΔyPID—PID调节参数变化量;KRP—比例系数;KRI—积分常数;Tn—重调时间;Tv—提前时间;e—调差;t—自e变化时的持续时间;RK—回授电阻;CK—回授电容器;Re—输入电阻;Ce—输入电容器。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。