



15.3.5.1 过程控制的类型
提要1:过程控制应用举例
•包装设备。
•分类设备。
•输送设备。
•洗涤机。
提要1所列的许多控制可以分解或相互跟随的工步,这样的控制作为过程控制进行层次特别清楚的编程。一个过程控制的典型例子是提升装置的控制。电梯厢停在楼层门前,然后打开门,并在规定的时间后关闭。关好门后允许电梯继续行驶。必须强制性地遵守此过程。洗涤机的控制也是过程控制应用的范例。如提要所示过程控制分为时间控制型和过程控制型。
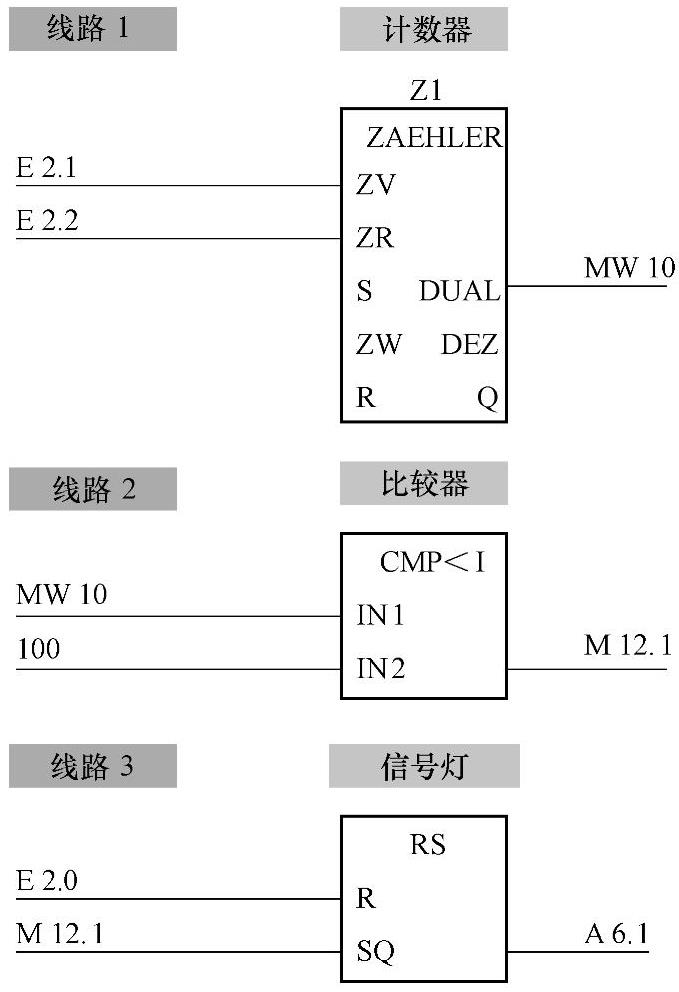
图15-43 例题8用SPS逻辑图
提要2:过程控制范例

时间控制型过程控制的接通是与时间有关的单个工步,而过程控制型过程控制的随后工步的接通是通过控制程序的控制设备信号来实现的。这样的接通条件可以是达到某一温度、某一压力、某一规定位置或气动气缸的终端位置。大多数过程控制为混合型控制,如提升控制。门的打开与轿厢的继续行驶与过程有关,而其轿厢门打开时间的长短与时间有关。过程型接通条件应优先于与时间有关的接通条件。
15.3.5.2 操作方式
如图15-44所示,过程控制可以分为工作方式部件、过程链和指令输出。
作为操作方式分为手动操作、自动操作和单步操作。手动操作的单个控制装置与控制程序无关,由于发挥了作用,安全闭塞装置仍然有效。自动操作中的控制是自动运行并且其单个程序步不受操作人员的影响。在单步操作中,设备是逐步接通的。在图15-45所示的操作面板上有步的显示,所属的指令只能由一个放行激活,这种操作方式简化了故障寻找与运行。
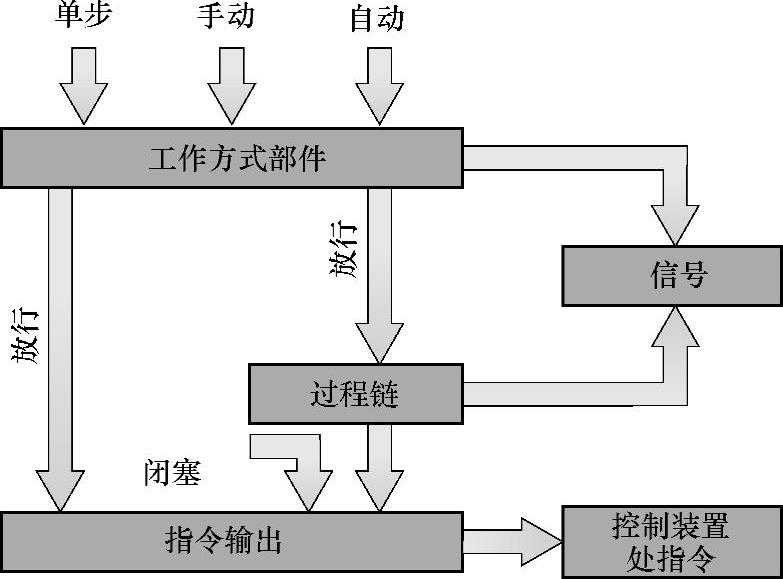
图15-44 过程控制结构
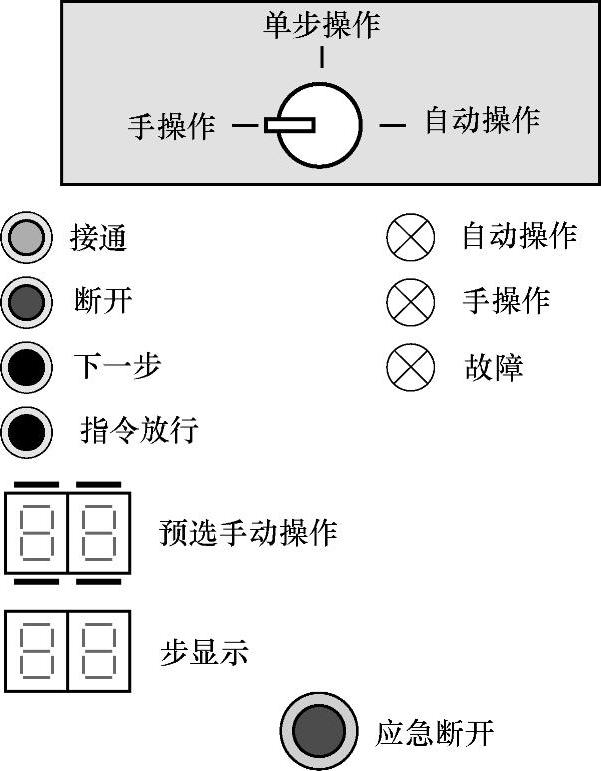
图15-45 过程控制设备操作面板范例
过程控制应有某种结构的编程并可简化故障的寻找与设备的运行。
15.3.5.3 过程链(结构)
过程控制的最重要的部件是图15-46所示的过程链,在其内部把程序划分为单个的、强制的相互叠在以下的步。释放当时步的动作给步赋值。步通过满足了一转接条件(转变条件)而被激活。
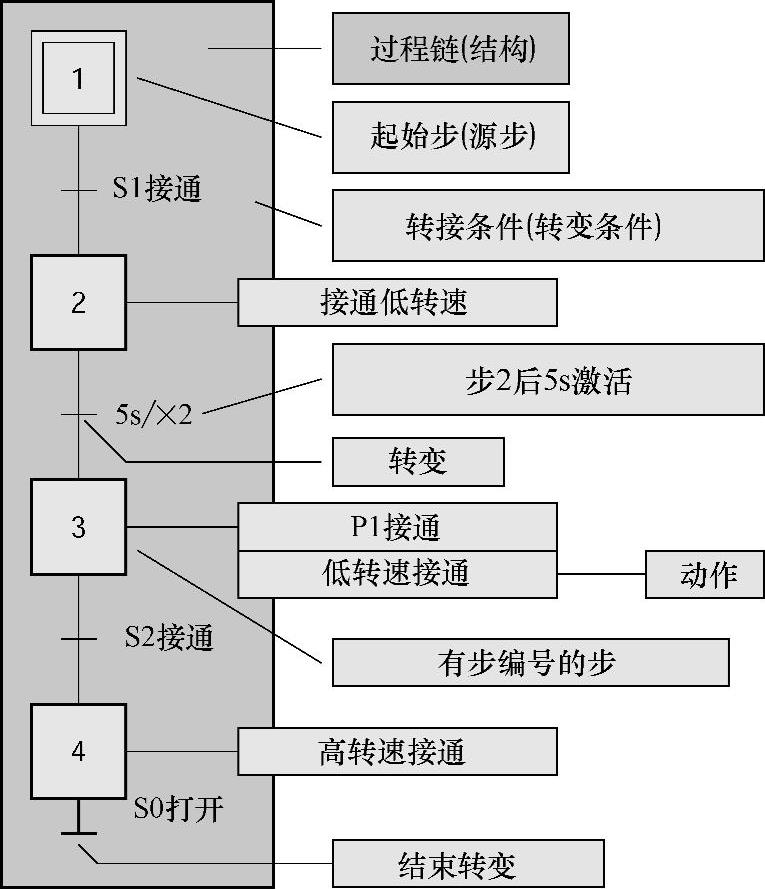
图15-46 按DIN EN 60848:2002的常用逻辑图
过程链控制 NE 60848
•图15-46所示的过程链由步和转接条件(转变)组成。
•在两步之间总存在一个转接条件(转变)。
•源步(起始点)从一个无激活条件的过程链开始。
•在线性过程链中,总只有一个步激活。
•如果先前步激活为UND满足转接条件,便从一个步到达下一个步。
•随后的步复位先前步。
•如图15-47所示,释放当时步的动作给步赋值。
例题9:
一台有两个分开绕组的电动机用键控器S1接通低转速并在最早5s后由键控器S2换接到高转速。控制灯P1显示换接准备情况(图15-48a)。
由图15-46的过程链来描述任务。在过程链启动前,置位起始步。S1的一个1信号激活步2。在步2中为低转速运行并且时间函数延时逻辑1。在启动延时5s后置位步3,控制灯点亮,电动机继续以低转速运行。现在S2有一个1信号,过程链达到步4。在步4中电动机从高转速运行。
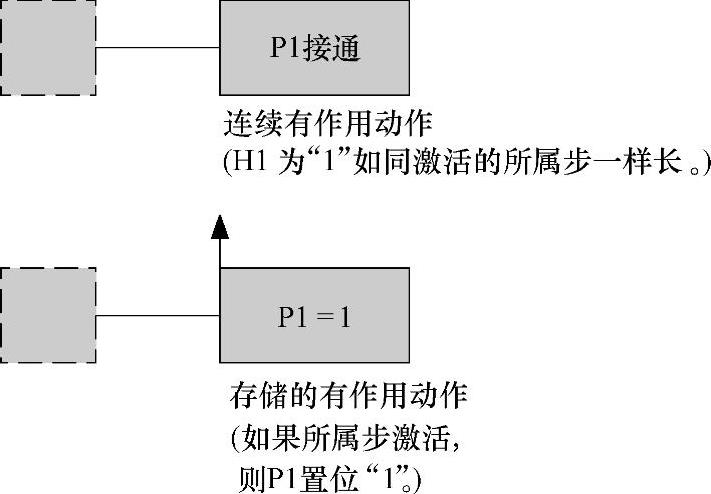
图15-47 连续与存储的有作用动作
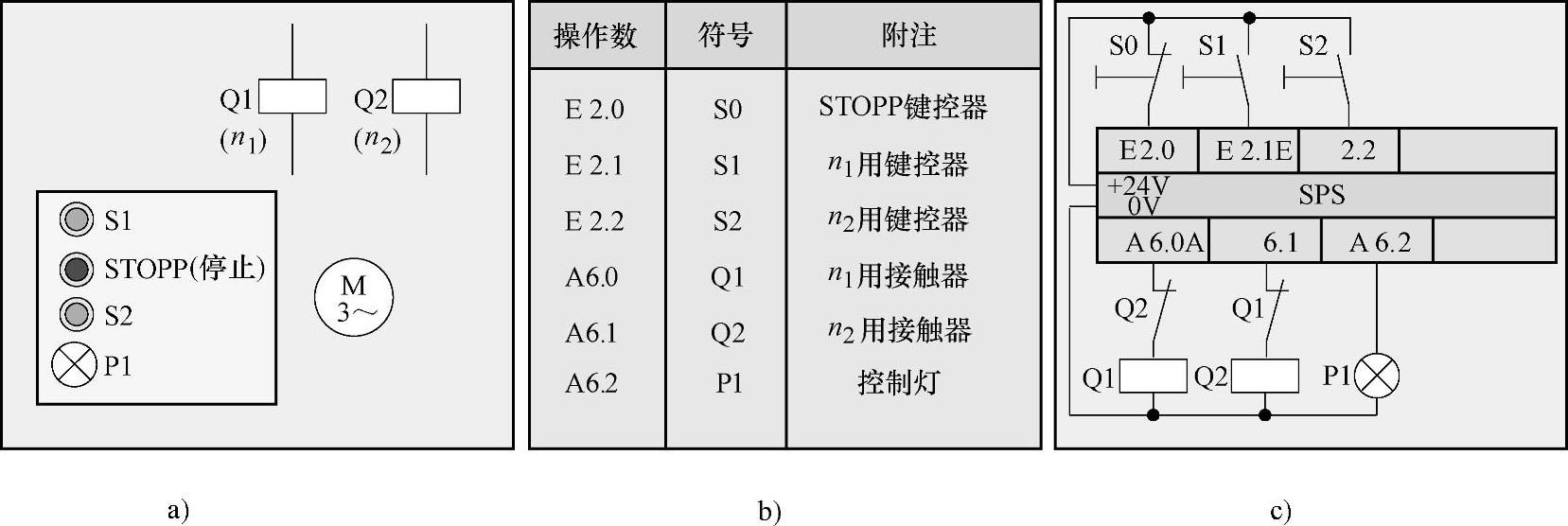
图15-48 双转速电动机控制(例题9)
a)技术简图 b)分配 c)SPS布线
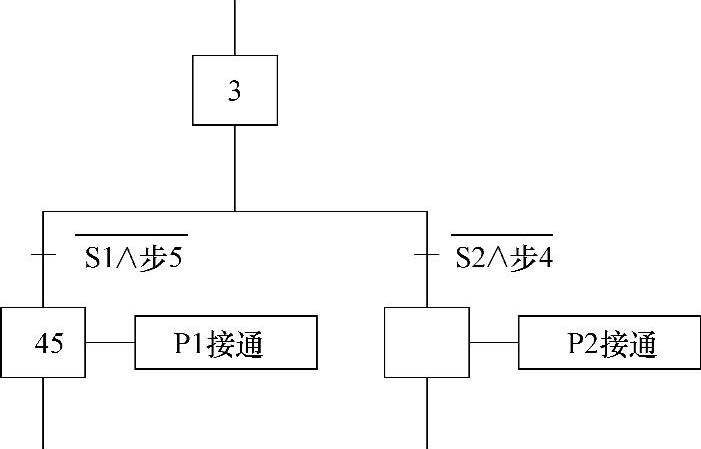
图15-49 有过程选择的过程链
15.3.5.4 分路过程链(过程选择)
在控制课题中需要有能按以不同条件有关划分成两个或多个分路的控制链。通常不包括如图15-51所示(例题10)的不同分路的互相条件,但仍可以把用于不同分路的规定联系起来,在这种情况下,如图15-49所示,必须分别彼此联锁。
例题10:
图15-50所示的一台网球包装设备用3个或4个球自动填装进盒中,并用EIN接通,然后启动传送带(M2)。若初始器B1认出一个盒,传送带停机。光感器B2登记其是以大盒处理还是以小盒处理并接通隔离器(M1)。网球从大料库落到盒中,并由光栅B2采集,每个包装为3个网球或4个网球,距装填台最近的盒被输送走,此过程连续反复地进行。设备用AUS停止工作。在最后的盒填装好后再停机。当出现NOT-AUS时,应立即断开设备。
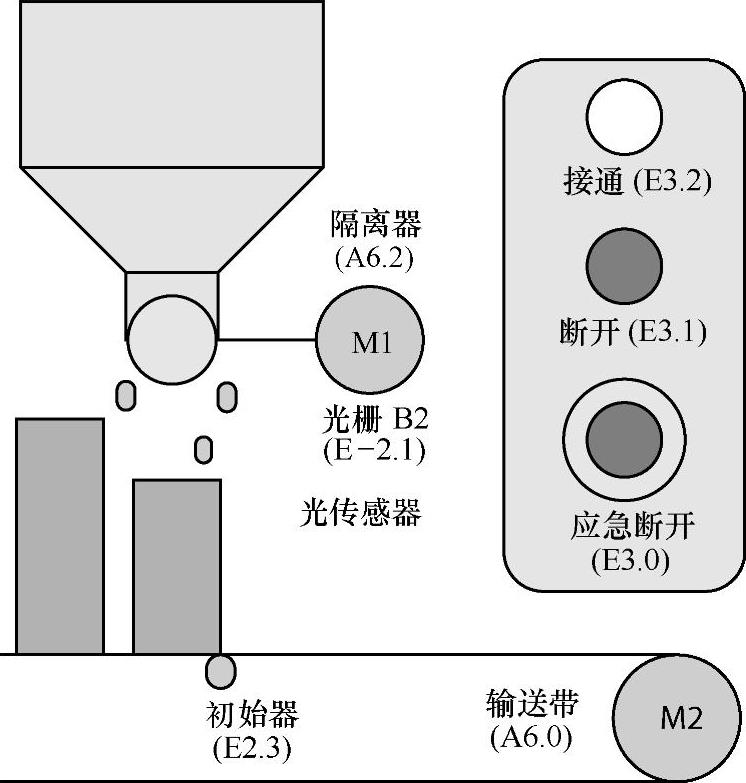
图15-50 网球包装设备的技术简图
由图15-51的过程链描述课题。对此,不是在每个盒后都须重新操作输入键控器,作为步2的转换条件是使用由输入键控器置位的标记和由AUS或NOT-AUS复位。对此应保证在停机前最后盒已填装完。
输入标记导致1信号,步2激活并启动输送带(M2)。一个盒到达初始器B1,并导致1信号,它作为一个小盒处理,光传感器B3保持无衰减并导致0信号。逻辑连接 有1信号。过程链分路到步3。当为一个大盒时B3有一个1信号并分路到步5。在步3中,隔离器接通,反向计数器Z1置位3。3个网球通过光栅B2落下,计数器Z1有计数器状态0而输出Q导致一个0信号。满足了步4转接条件。在步4中,启动传送带并且盒远离初始器B1。由此B1有一个0信号并满足了步1的返回条件。
有1信号。过程链分路到步3。当为一个大盒时B3有一个1信号并分路到步5。在步3中,隔离器接通,反向计数器Z1置位3。3个网球通过光栅B2落下,计数器Z1有计数器状态0而输出Q导致一个0信号。满足了步4转接条件。在步4中,启动传送带并且盒远离初始器B1。由此B1有一个0信号并满足了步1的返回条件。
NOT-AUS复位输入标记和全部步,只置位步1。
15.3.5.5 具有SPS过程链的编程
标记赋值步。此标记也称为步标记,步标记逻辑连接激活指令。在接通SPS时,置位起始步。对此是使用一个仅在第一个SPS循环中导致一个1信号的特殊标记。SPS设有此特殊标记是通过图15-52所示程序产生的定向脉冲。(https://www.xing528.com)
程序说明:在第一个SPS循环中,标记M128.0导致一个0信号,在第二程序行M128.1有逻辑1,而在第三程序行中,标记M120.0置位1。在下一个SPS循环中,M128.0也有一个1信号。通过否定在第一程序行导致M128.1在第二程序行导致一个0信号。由于M128.0在整个SPS程序中不复位,所以M128.1不可能多于逻辑1。因此其只在第一个SPS循环中有一个1信号。标记M128.1称为定向脉冲,并置位源步。
对于例题9应从图15-46所示的过程链出发开发出图15-53所示的SPS程序,对此须注意过程链控制。
程序说明:如果每次前步标记激活UND转接条件满足,则置位步标记,随后的步标记复位前步,因此电动机瞬间断开,STOPP键控器(E2.0)复位所有步,只有起始步、步1应置位,因此,过程链可以再启动。步4无后继者,因此只能由STOPP链控器复位。低转速在步2或步3接通,高转速仅在步4接通。高、低转速用指令是通过UND逻辑连接彼此联锁,在步3中控制灯H1点亮。
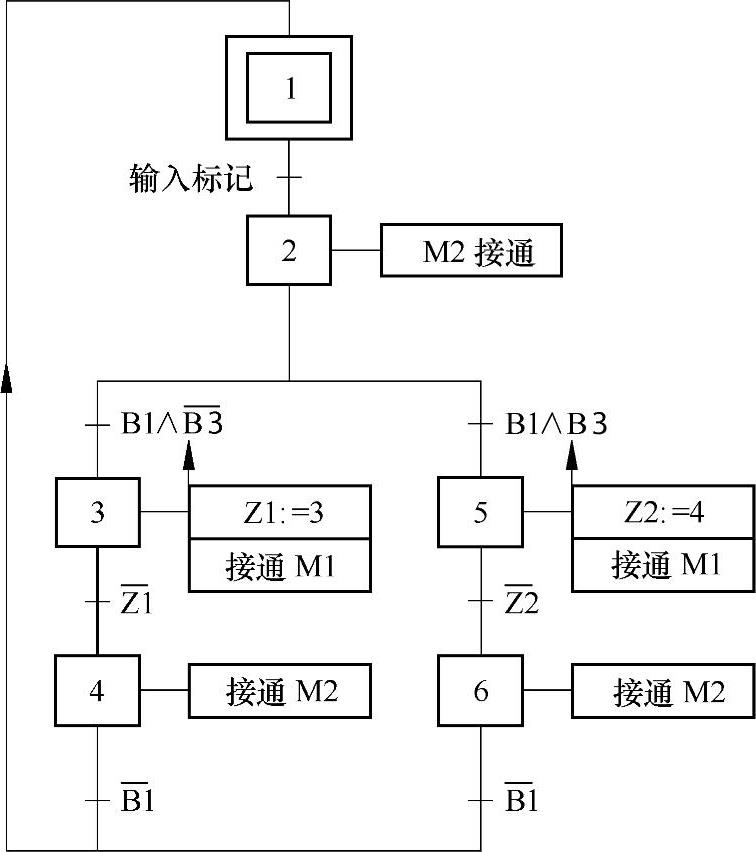
图15-51 例题10的过程链
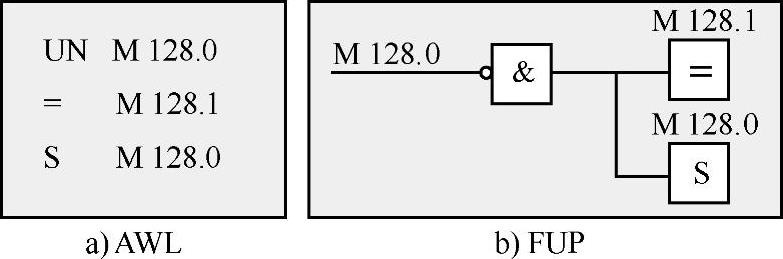
图15-52 AWL与FUP中定向脉冲用SPS程序
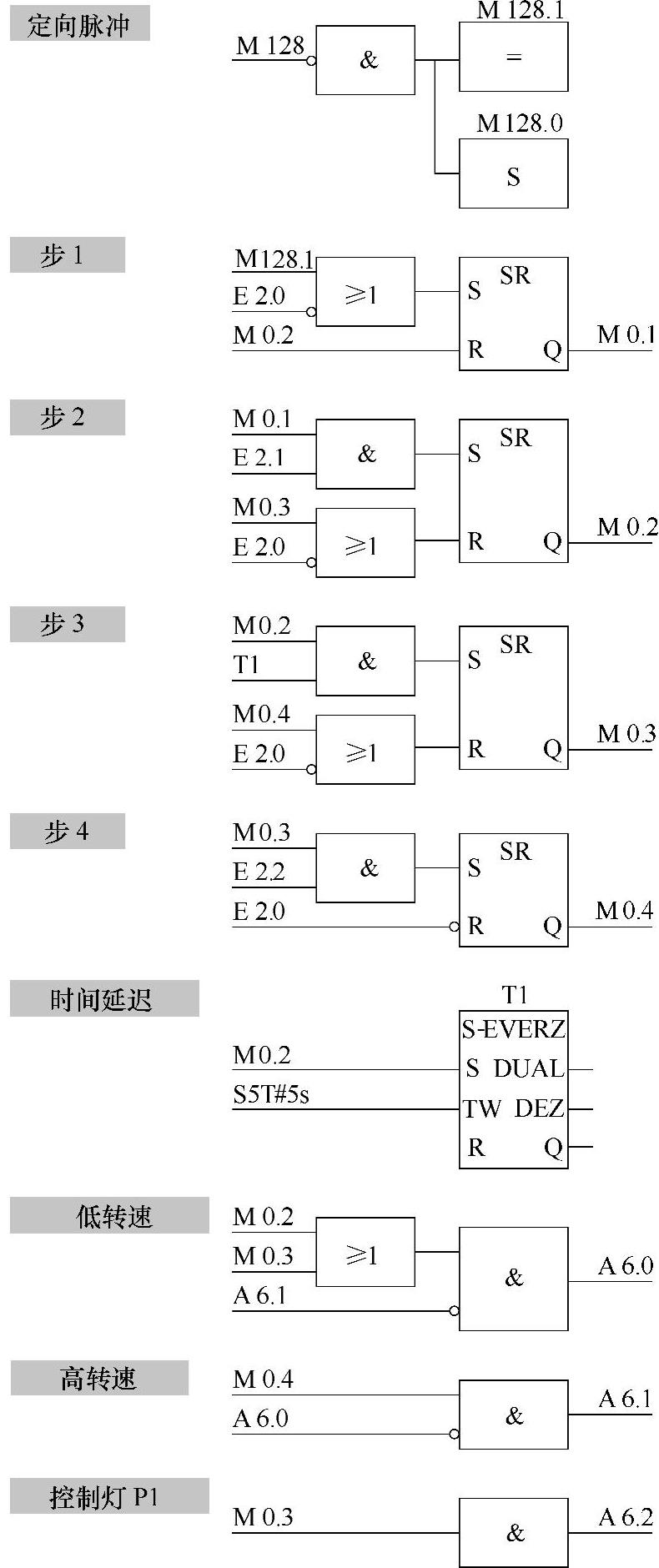
图15-53 例题9用SPS程序
复习题
1.编制一个自动3级集电环转子电动机起动器的过程控制程序,起动器应在转换到下一级之前有5s的运行时间。
2.在一个食品厂中,原料在滚筒中混合。接通电源后先进行20s的逆时针旋转,并停顿2s,然后顺时针旋转20s,再停顿2s。如此反复循环进行5次,然后停机。用AUS随时断开。请编制一个过程控制程序。
15.3.5.6 机器安全性
安全范围。在设计机器时必须注意应尽量减少对机器和设备部件带来的危险。如果对机器采取的安全措施不足,则应备好应急断开开关或调整用技术保护装置。对于设备的选择,这些与安全有关的机器控制部件应按DINEN954-1标上危险图示,它提供了必要的安全范畴。对于故障安全保护要求列入在安全范畴之内。手操作范畴对于控制是选择合适的操作或相应的安全开关设备(图15-54)。
提要:机器的安全性
•与安全有关的部件:
——应急断开装置
——安全门位置监控装置
——双手联锁装置
•有效的安全性原则:
——控制电路的功能接地
——通过去激励停机
——强制断开的开关设备
——接全部有源导体
机器安全技术的详细表述在地址http/www.loeffelhardt.de/homepage/docs/leistungen/ow-tec/sibuch_sel.pdf中可查找。
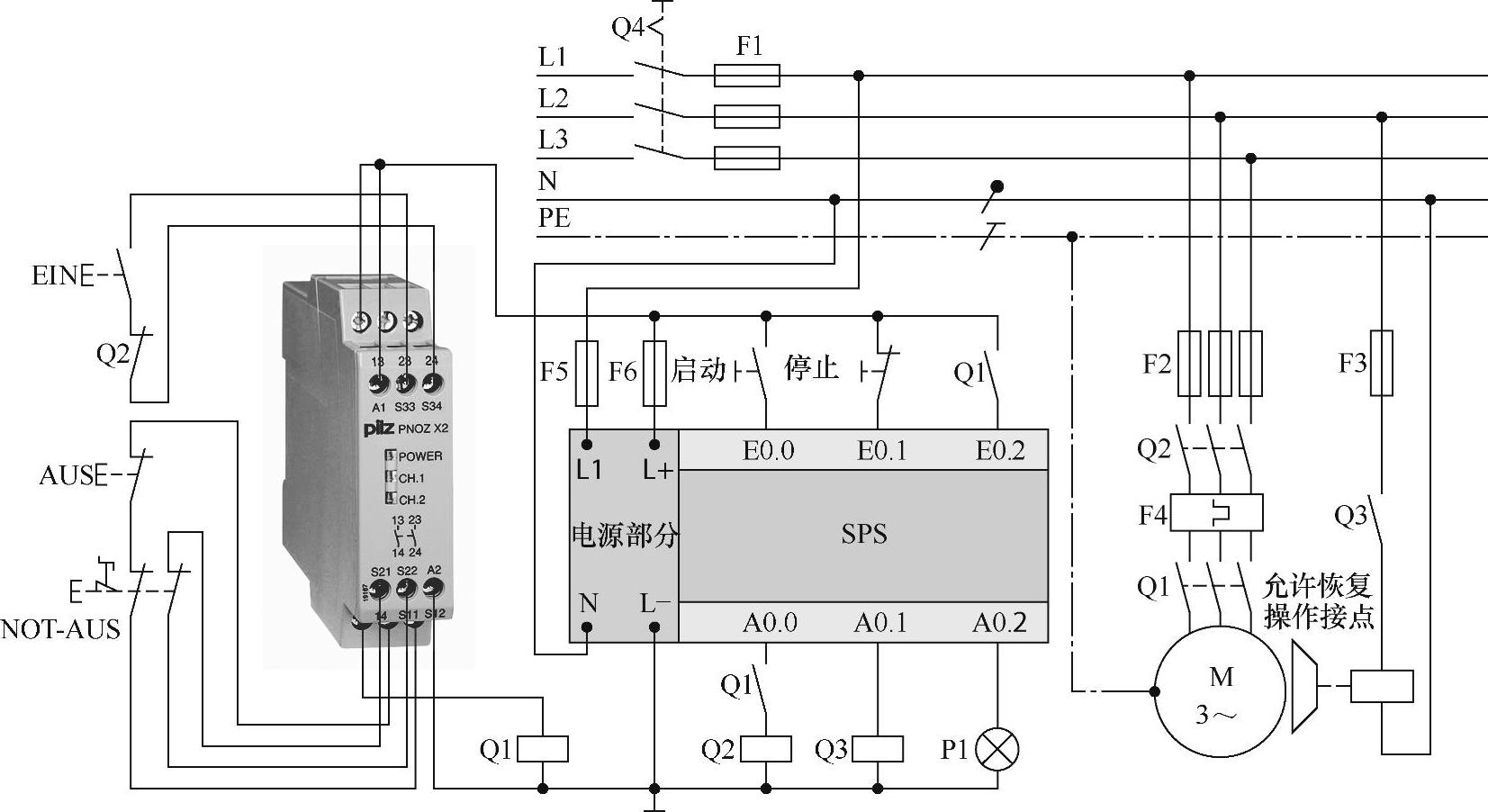
图15-54 有NOT-AUS安全开关设备的SPS
控制系统与安全有关的部件是根据电动机安全技术有效安全原则(见提要)来制造。SPS控制的机器允许断开其传动装置的安全关系重大的部件,但不取决于SPS程序。对此,则按图15-54所示把SPS与安全装置组合在一起制造。SPS安全装置是通过图15-54中的输入E0.2发出信号并被控制程序所利用。对安全有重大关系的控制装置的实际断开总是经过图15-54所示总电路中的允许恢复操作接点来实现。
如传动装置等对安全有重大关系的部件的纯关于软件的断开是不允许的。
15.3.5.7 应急断开(事故中的动作)
提要:停止功能
范畴0:通过立即断开传动装置的供电使机器停机(未控式停机)。
范畴1:控制式停机,即给传动装置能量并直至使其达到静止状态,如反接制动。
范畴2:控制式停机,即给传动装置能量并在停止状态后也保留,如伺服电动机。
为了保护机器和材料,则必须在机器出现事故时能快速而安全的停机。对此DINVDE0113部分1要求有NOT-AUS开关的安全装置。在VDE规范中,用“事故中的动作”术语代替NOT-AUS术语,事故中停机与事故中断之间是有区别的。
ⓘ机器准则规定了用于所有机器的NOT-AUS装置(不包括手提式设备)。
操作释放事故动作的元器件(应急断开开关)必须容易触到并在每个操作位置都应有,并且必须有自动卡住和强制打开接点。允许为按键操作开关或开伞索开关。为了事故后停机,也允许为无机械保护脚踏开关。如图15-55所示,操作部件应为红色,其背景为黄色,并且必须是一个菌状形状或棕榈形成。
(1)事故中的停机
1)停止一个有危险的过程运行,如不允许的发热或有危险的运动。

图15-55 NOT-AUS开关操作部件结构
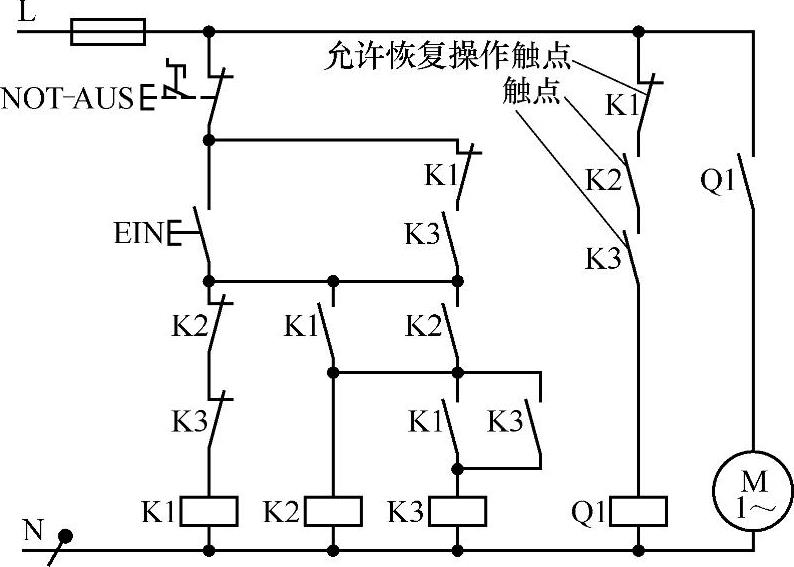
图15-56 自动监控NOT-AUS装置(安全范畴,按DINEN954-1)
2)相对于其他功能与操作有优先权。
3)应不产生其他危险,可快速中断对有危险设备部件的供电。
4)作为停止范畴0和1(提要)必须有效,并且只允许经过图15-56所示的用线连接固定电动机装置实现。停止功能不允许与电子开关逻辑或经过通信网络指令传输有关(不包括特殊的AS-1或西门子公司制定的现场总线网)。
(2)事故中的断开
1)如在触电危险时把设备或设备部件与电源隔离开。
2)如果仅是通过距离或障碍物达到防直接接触保护或因电能引起的其他危险风险或损害风险,则对此应优先考虑。
3)总用范畴0的停止来实现。
(3)事故断开后的重接通 机器的重接通是通过起动功能来实现的,并且用于事故动作的全部开关元器件,如NOT-AUS开关,只允许在事前用手进行复位,不允许只通过联锁实现机器的重新起动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。