



13.2.2.1 三相异步电动机
异步电动机是最重要的三相交流电动机。定子产生旋转磁场在转子中感应出电压,并以此使转子旋转。这种电动机也称为感应式电动机。不同类型的异步电动机,其转子的结构也不相同。
13.2.2.2 笼型异步电动机
(1)结构 如图13-62所示,笼型异步电动机的定子由壳体、定子铁心及定子绕组组成。线圈的终点与终点引接到接线牌上。
转子由安装在轴上的铁心以及嵌置在铁心槽中的铝或铜条组成。在铁心的端面处,铝条或铜条由一个短接环连接,这些铝条或铜条和短接环组成了转子绕组,由于其形状像鼠笼,所以称其为笼型转子。
定子铁心和转子铁心均由互相绝缘的硅钢片叠压而成,这可减少涡流损失。
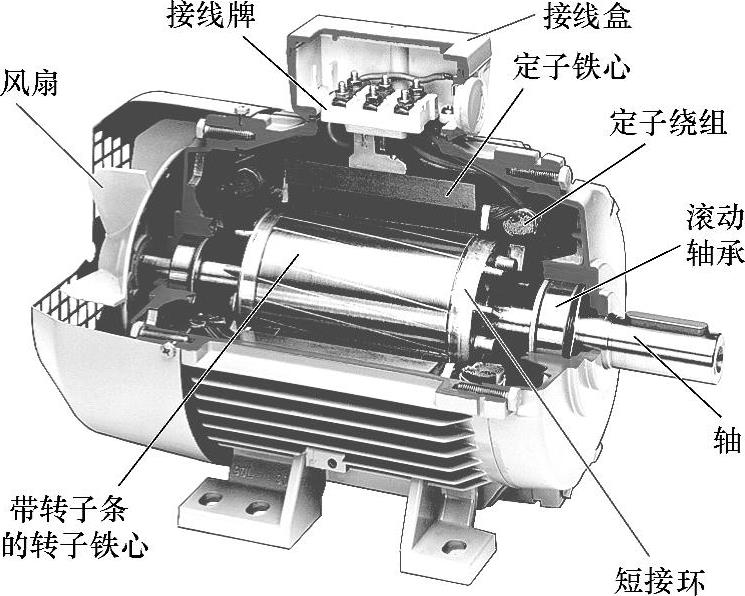
图13-62 三相笼型异步电动机
(2)工作原理 笼型绕组可以看成三相绕组的最简单形式。笼型异步电动机在接通的瞬时如同一个变压器。定子绕组的旋转磁场在暂时不转的转子中的线匝上产生磁通变化。磁通变化速度与旋转磁场转速成比例。如图13-63所示,感应电压使电流在由短接环所连接的导线中流过。
异步电动机为感应电动机,转子电流由于电磁感应而产生。
根据楞次定律,由转子电流产生的磁场产生了一个使转子按定子旋转磁场的旋转方向转动的力矩。当转子达到旋转磁场转速时,则在所观察的线匝中的磁通变化为零,如图13-64所示,感应电压使转子在其所产的转矩的作用下发生转动。转子的转速始终低于旋转磁场转速。此两转速的差称为异步转速。
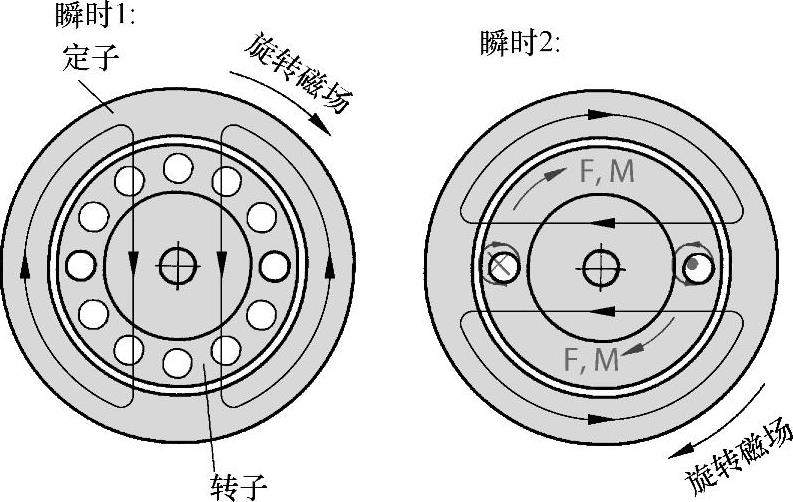
图13-63 在静止转子上的旋转磁场的感应作用
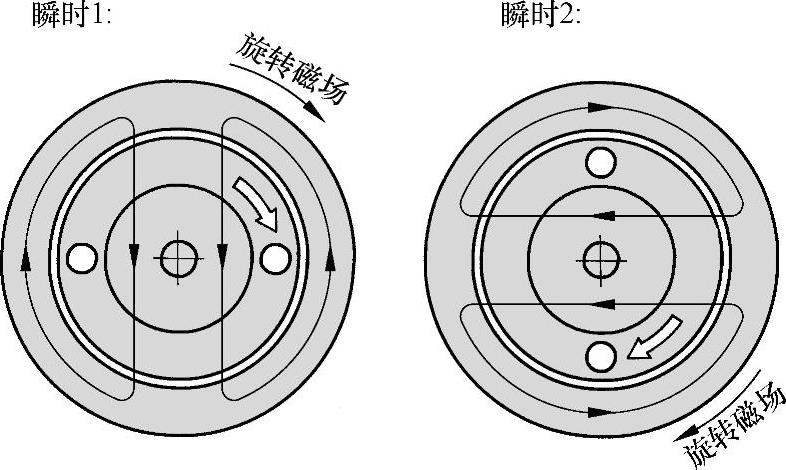
图13-64 由带旋转磁场转速的旋转定子的相同不变的磁通
异步电动机有一个感应转子电流的转差率。
在测定功率运行时的转差率约为旋转磁场转速的3%~8%。
异步电动机转差率

式中 Δn——转差数;
n——转子转速;
ns——旋转磁场转速,同步转速;
S——转差数与旋转磁场转速的比(%)。
ⓘ异步电动机的转子转速低于旋转磁场转速。
计算例题:
问一台频率为50Hz、转子转速为1440r/min的4极三相电动机的转差率为多少?
解:

实验13-5:用一个涡流制动对笼型异步电动机加载,并观察其转速。
转子转速随负功的增加而降低。
异步电动机的转差率与负载有关。
(3)运行特性 笼型异步电动机是以图13-71所示的圆导条转子或集肤效应转子的形式制造而成。
电动机的运行特性原则上是以圆条形转子来阐明。笼型绕组是圆的或近似圆的条状横截面组成。接通的瞬时,主要是使转子产生电感。笼型条的有效电阻很小,因此,起动电流可达到10倍的测定电流。尽管如此,但其起动力矩仍然很小。
圆条转子虽然具有高起动电流,但其起动力矩很小。
随着转速的提高,转子的感应电压和电流随之减少,其原因是转子阻抗减小,与此同时转子电压与转子电流之间的相位差也随之减小。
图13-65所示的转矩特性曲线表明了转矩提高到电动机的最大转矩的极限转矩Mk,然后,转子感应电流会加强,而电动机的转矩将降低。在测定转矩Mn(测定负载)时,电动机有测定转速,其在空转时几乎达到旋转磁场转速ns。在此范围内的负载变化量ΔM是与异步转速成比例。图13-66表示出了电动机转速与其转矩关系的特性曲线。

图13-65 笼型异步电动机转矩特性曲线(深槽转子,M与n有关)
在负载时,转速仅下降一些。笼型异步电动机的特性曲线同表13-9中所列的直流电动机的特性曲线一样,这样的转速特性称为并励特性。
起动后的鞍点转矩Ms称为最小电动机转矩。采取不同的定子和转子槽数并按图13-67所示把转子条布置成斜的或阶梯形,便可避免鞍点转矩的形成。
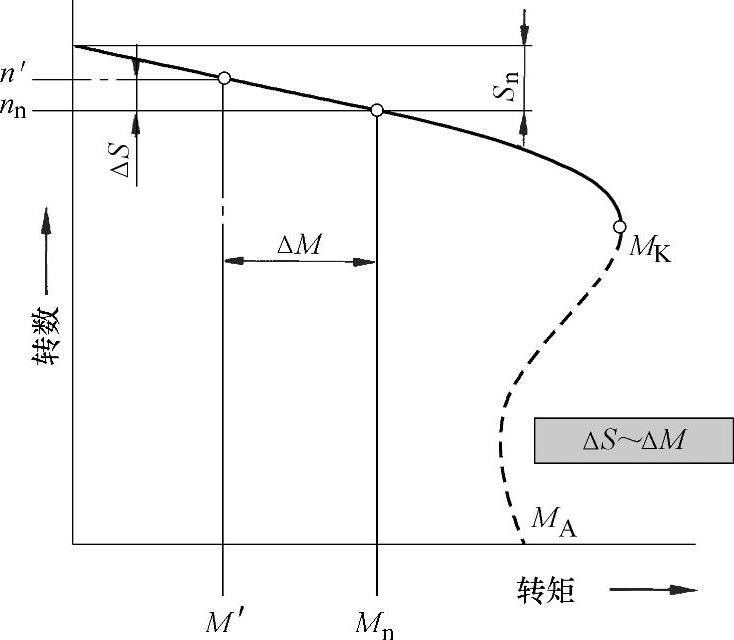
图13-66 笼型异步电动机(n与M关系)的负载特性曲线
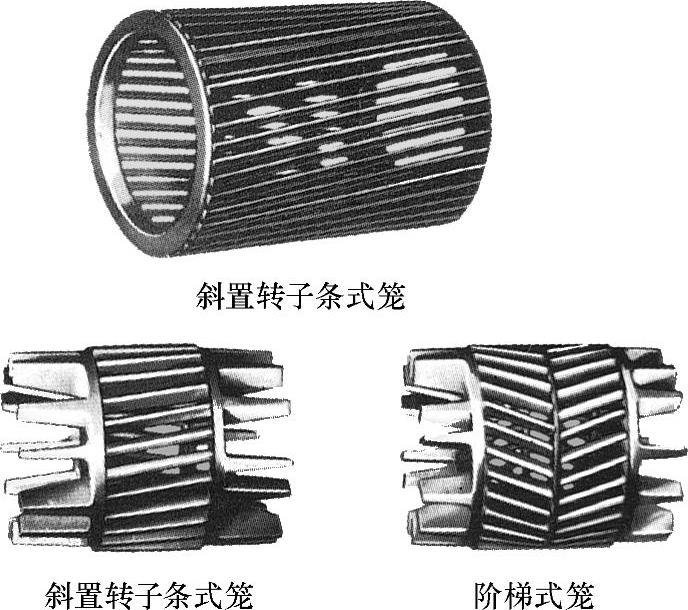
图13-67 笼型转子的结构图
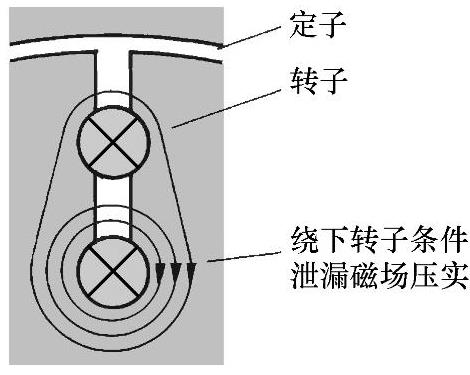
图13-68 集肤效应(双笼型转子)
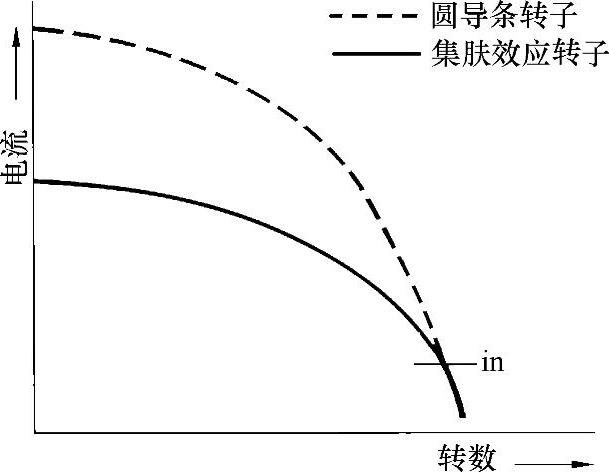
图13-69 起动电流
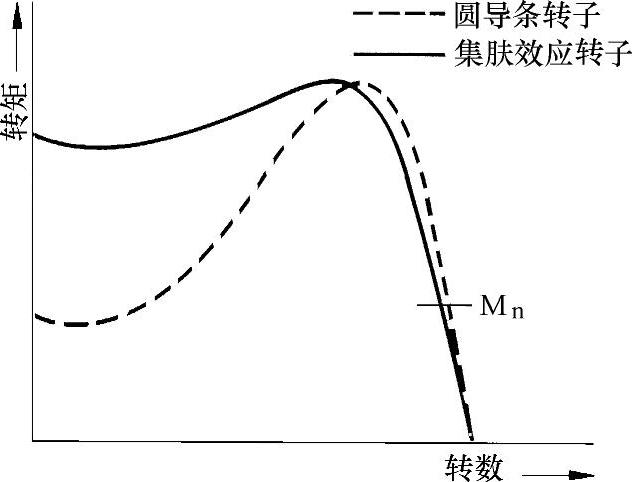
图13-70 转矩特性曲线
通过采用铝合金等高电阻转子条材料,可在较小起动电流的同时能得到一个较大的起动转矩。大的转子有效电阻同时能减小相位差,较小的起动电流也能提高有效功率部分。
为了避免在运行中因转子电阻所引起的损耗,笼型异步电动机多采用电流集肤效应的笼型转子。
(4)集肤效应转子 为了提高起动时的转子有效电阻,则在转子槽中布置了图13-68所示两条被分开的两转子条,且两转子条中有由定子旋转磁场所感应出的转子电流流过。这些交流电流绕每根转子条产生一个漏磁场。两个漏磁场在其所属的转子条中感应出电压。根据楞次定律,这些电压在每根转子条中所引起的交流电流是很小的。在下面转子条周围的漏磁通很强,其原因是那里的铁心中可以闭合磁力线。下面转子条中感应电压的电流减少作用是上面导线的二分之一,从而使电流流向气隙方向,即向外笼方向聚集。集肤效应转子在起动时只有转子条外面的小的槽截面可供使用,所以其电流密度和槽电阻都大,因此如图13-69所示,其起动电流小。通过减小的相位差,但如图13-70所示,其起动转矩仍比圆导条转子要大。除集肤效应转子以外的其他形状的槽,其作用是相同的。根据槽的形状分为图13-71所示的双笼型转子条转子、深转子条转子和楔形转子条转子。
开始,由于转子频率和漏磁通低,所以集肤效应减小。在运行时,电流支配着整个槽的横截面。
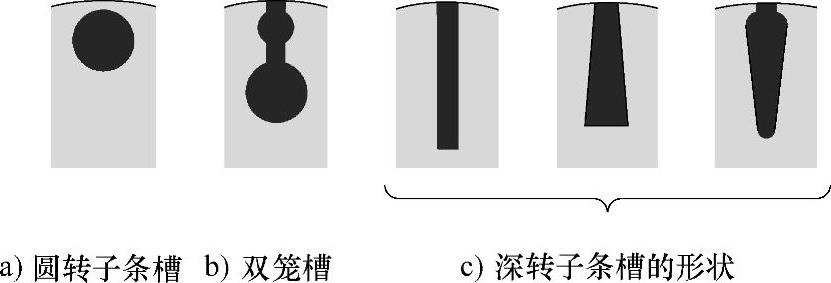
图13-71 笼型转子的开槽形状
集肤效应转子的起动转矩大,而起动电流小。
具有集肤效应的转子,因其转子槽的截面积较大,所以正常运行时的漏磁较大,致使电动机的功率因数和效率略有降低。
笼型转子电动机的应用。笼型转子电动机价格便宜,便于维护并且不受无线电干扰,主要用于拖动中小型设备,如车床、起重机、鼓风机以及农用设备。
在测定负载时达到最有利的运行特性。如图13-72所示,这种类型的电动机效率高,功率因数大。
ⓘ同步转数
转子转数等于旋转磁场转数。
磁阻电动机。如图13-73所示,在笼型转子的叠板铁心圆周上同其他电动机一样开有许多槽,然后定子旋转磁场磁力线继续通过转子铁心,只有少量的磁力线以大的磁阻通过开槽,因此转子得到一个槽极并在旋转磁场的后面建立。磁阻电动机的起动如同笼型异步电动机,而运行则如同同步电动机。过载会导到磁阻电动机的异步运转。

图13-72 功率均为2~5kW的鼠型转子电动机的典型特性曲线
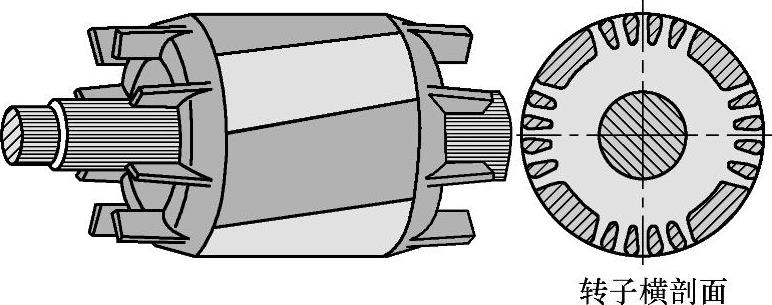
图13-73 磁阻电动机的转子与转子铁心
磁阻电动机有同步转数。
由于转子上的开槽是气隙并且其漏磁很大,所以磁阻电动机有效功率因数较小,容纳的电流比同功率的异步电动机大,而且其效率低。
磁阻电动机用于驱动具有常转速的设备,如纺织机,可当同步电动机的小型电动机使用。
复习题
1.叙述三相笼型转子电动机的结构。
2.为什么异步电动机会产生转差?
3.异步电动机测定负载时的转差为多大?
4.负载变化对异步电动机的转差率有何影响?
5.请解释起动转矩、极限转矩和鞍点转矩的定义。
6.请解释集肤效应转子的作用原理。
7.集肤效应转子电动机比圆转子条转子电动机有何优点?
8.在什么样负载下异步电动机达到最佳运行特性?
13.2.2.3 笼型转子电动机的起动
笼型转子电动机开始起动时的起动电流大,为了避免引起电网电压的波动,用于所有大功率电动机的配电网经营者规定了具体的起动方法。允许起动电流要符合技术连接条件(表13-5)。
表13-5 国家低压电网(400V)按TAB的电动机的连接条件

∗若不知起动电流,则用8倍的测定电流。
当视在功率超过5.2kVA时,则应按三相电动机的起动方法起动。
对于笼型转子电动机只通过降低其定子绕组上的电压来减小起动电流,即用定子起动法。
定子起动法是通过降低定子电压来减小起动电流。
电动机的功率和转矩与电压的平方成正比,因此,当电压下降时,功率和转矩也相应减小。
在定子起动法时,转矩与定子电压的平方成正比。
若电动机以二分之一的测定电压起动,则起动时,转矩将减小到原来的四分之一。由图13-74所示的特性曲线可以看出,起动时达到测定负载时所需要的转矩。
定子起动只适用于空载或轻负载起动。
(1)电阻定子起动 为了在起动过程中降低定子电压,如图13-75所示,在电动机引线上按上有效电阻,以使起动电流得到相应的减小。
采用有效电阻会在起动过程中产生热损耗。为了避免这种损耗,可以用电抗器进行起动,但是,这种起动方式会降低电网的功率因数。
笼型电动机平滑起动法是小型电动机用的起动方法。如图13-76所示,这种起动方法只是用一电阻来限制起动电流,主要用于纺织工业的驱动系统,以减小起动转矩。

图13-74 笼型转子电动机全、半测定电压时的转矩特性曲线
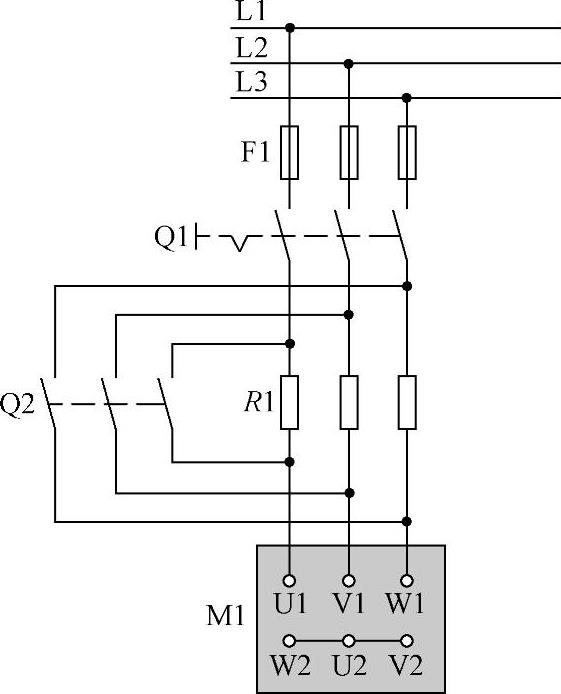
图13-75 引线中有起动电阻的三相电动机
(2)起动用变压器 变压器降低电动机电压,并以此减小其起动电流。变压器的变换比把电网电流降到正常值。电网中的起动电流的减小与降低的电动机电压成平方关系。
起动变压器用于高电压电动机和大功率电动机。出于费用上的原因,则采用图13-77所示的自耦变压器。
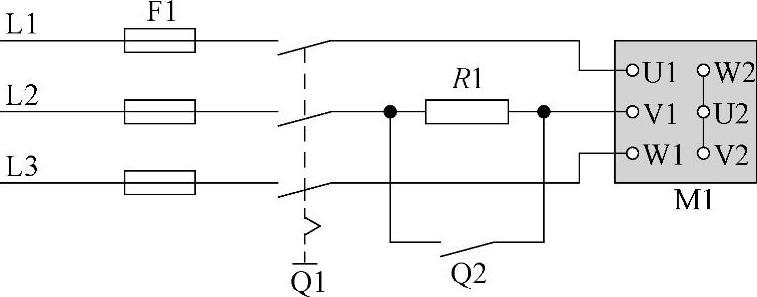
图13-76 笼型转子电动机的平滑起动法
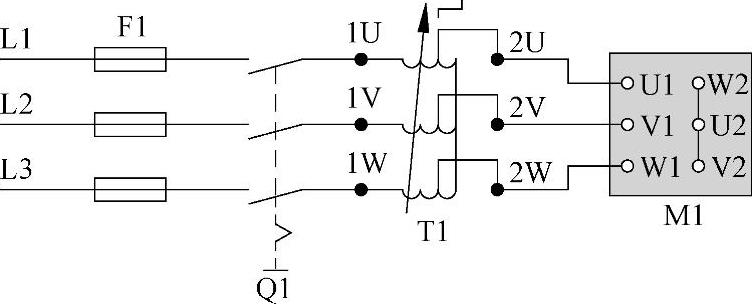
图13-77 有起动变压器的三相电动机
(3)星形/三角形起动法 相电压与网电压一致的电动机,在测定运行中是以三角形联结运行的。这样可使其相电压比星形联结起动时降低 倍。根据三相电耦合规律可知,在引线中的电流及功率下降到1/3。
倍。根据三相电耦合规律可知,在引线中的电流及功率下降到1/3。
以星形联结起动时,其起动电流和起动转矩下降到三角形运行的1/3。
星形联结起动只用于空载起动或低转矩起动。在电动机以全负载运行前不能换接到三角形联结,否则会因过高的电流消耗而使绕组过载。
星形/三角形起动最常用定子起动法。除了接触器电路外,还可以使用图13-78所示的手动开关。
(4)电子均调起动装置 如图13-79所示,在电动机引线中有反向并联的晶闸管,三相调节器同样可用于以降低电压的方式起动电动机。
因为晶闸管首先通过电流脉冲(触发脉冲)在控制栅中导电,所以所接的同步电动机的定子电压以不变频率无级的变化(相位截止控制)。(https://www.xing528.com)
与星形/三角形起动法相比,均调起动装置能够无级地控制电压以及电流和转矩。电网和作功机械由此便不通过电流与转矩峰值而负载。
13.2.2.4 集电环转子电动机
(1)结构 如图13-80所示,集电环转子电动机的定子结构与笼型转子电动机相同,其转子叠片铁心和集电环是固定在转子轴上。转子绕组嵌放在转子叠片铁心槽中。转子绕组几乎都是接成三相(三相绕组),并且大多采用星形联结,而很少采用三角形联结,并通过3个电刷与集电环相接。经过电刷可在转子回路中接有效电阻,以此来进行起动和转速的控制。

图13-78 有星形/三角形手动开关的三相电动机
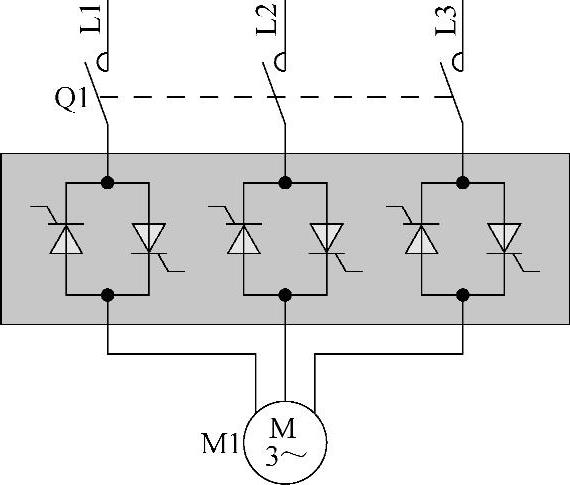
图13-79 带晶闸管的起动电路
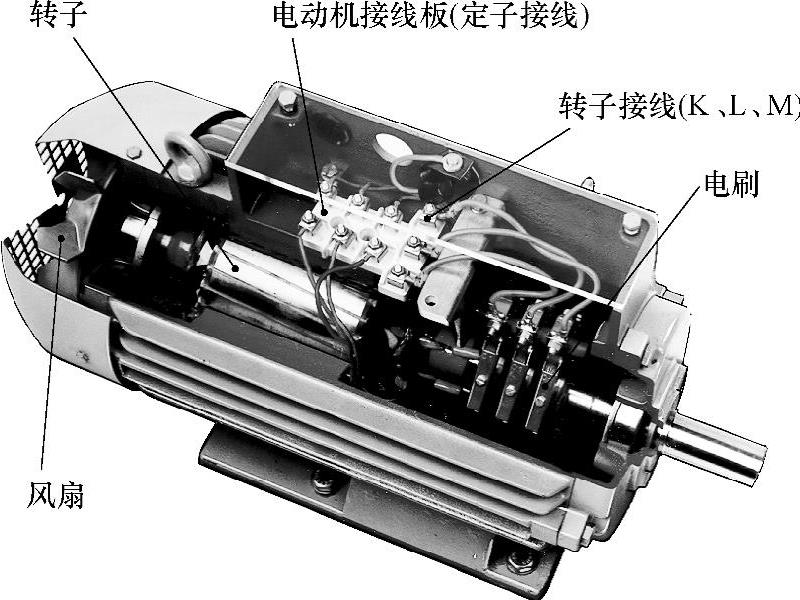
图13-80 集电环转子电动机
图13-81所示是三相转子绕组的接线符号K、L、M。对于大功率电动机,其转子也可以为两相绕组。图13-82所示为这种电动机的接线符号K、L、Q。
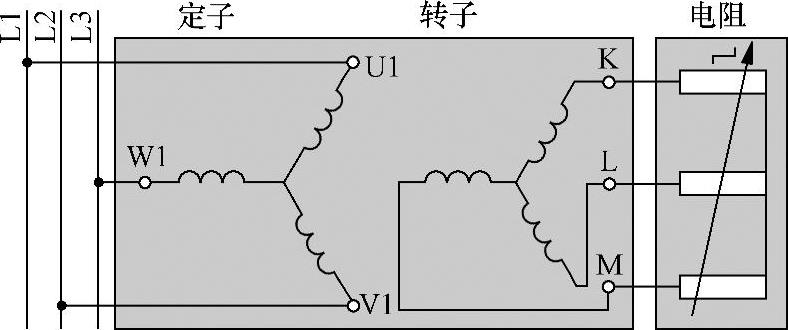
图13-81 有三相转子绕组和电阻的集电环转子电动机
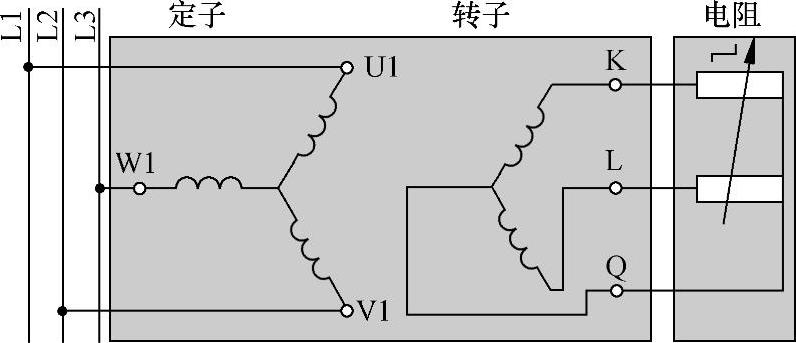
图13-82 有两相转子绕组和电阻的集电环转子电动机
(2)工作原理 定子旋转磁场在转子绕组中产生一个磁场变化。
实验13-6:把电流表接到集电环转子电动机的两个集电环上,如接到K和L上。接通定子。
转子不旋转,但在集电环之间有电压。在静止状态,定子和转子像一个变压器。定子旋转磁场在转子绕组中感应出电压。在转子静止状态时,在集电环上测出的电压称为转子静止电压。
实验13-7:把两个集电环,如K和L用电流表连接起来,短接第3个滑环,如用L短接M,接通定子,电流表指针偏摆,转子旋转。短接转子接线时,在转子中感应出的电压在转子绕组中引起电流。定子产生旋转磁场,转子电流产生转矩。
集电环转子电动机是感应电动机,其作用同笼型转子电动机
在图13-83所示的集电环转子电动机的功率铭牌上表示出了用于确定起动电阻的转子静态电压和转子电流。

图13-83 集电环转子电动机功率铭牌
运行特性。集电环转子电动机在短接其转子接线时,其运行特性同鼠笼式转子电动机。在负载运行时和在转子回路接有电阻时,其转差率提高,这是因为旋转磁场对转子的感应影响较大,因而需要补偿此电阻的功率消耗。如图13-84所示,电阻可无级调节,通过转差率的改变便可无级地进行转速控制。这种控制转速的方法仅适用恒转矩负载。
集电环转子电动机的转速是通过转子回路中的电阻来控制的。
对于大功率电动机,在采用电阻控制时,由于在电阻上的电流热损耗大,所以是不经济的。首先通过整流器级对转子损耗功率进行矫正,以便为以后返供到电网中。
13.2.2.5 集电环转子电动机的起动
在集电环转子电动机的转子回路中接一个起动电阻,这样就可以在起动时大大减小电流消耗。由于转子电流的有效部分大,与此同时也大大地提高了起动转矩。如图13-84所示,其转矩特性曲线走向平滑,极限转矩在起动范围内。
集电环转子电动机在小起动电流的情况下有大的起动转矩,并且可以在负载下起动。
按图13-85所示,在起动电动机时按阶段减小起动电阻,这样便可使电动机在正确调整转子起动器时,相对于大负载转矩能按图13-86所示平缓地起动,由此便可避免起动电流峰值。
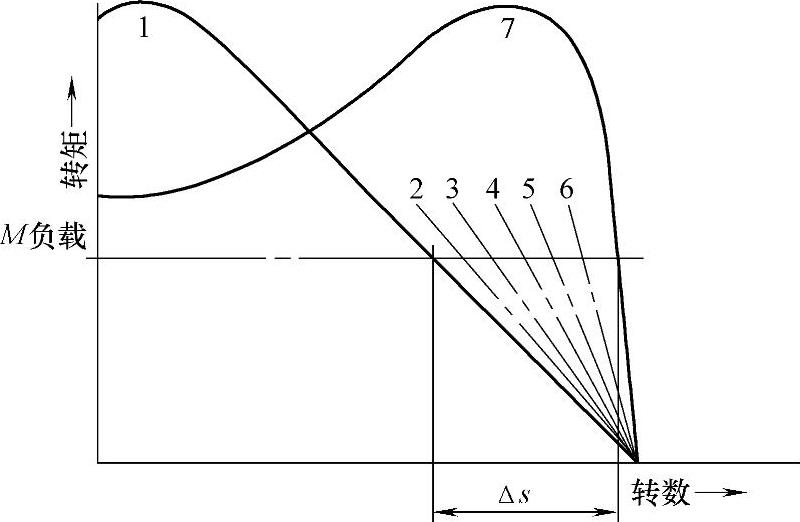
图13-84 通过在转子回路串接电阻的集电环转子电动机的转数控制
1—串接最大电阻值时的特性曲线 2~6—电阻值不断减小时的特性曲线 7—不接电阻时电动机特性曲线 Δs—通过改变转差率的转数控制范围
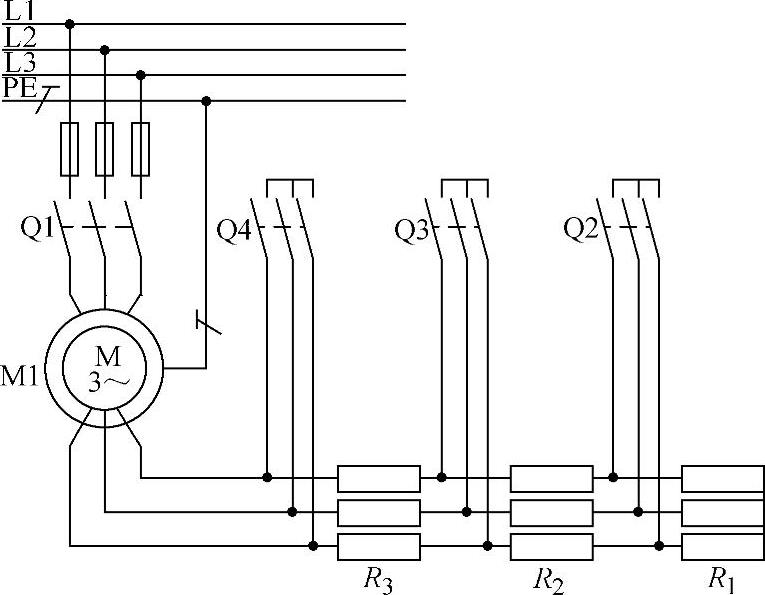
图13-85 具有三级起动电阻的集电环转子电动机
超过20kW的电动机大多有一个电刷提升器。在起动后,集电环通过销钉短接,同时提起电刷。
应用。集电环转子电动机的测定功率均为5~500kW。它用于供水泵、碎石机和大型机床的动力设备以及作为起重机等的全负载起动和难起动装置的动力设备。由于存在燃烧危险,因此集电环转子电动机不允许在农用房屋中使用。
13.2.2.6 可换极式电动机
改变笼型转子电动机定子绕组极数,便可改变旋转磁场转速和转子转速。
(1)有两个独立定子绕组的电动机 如图13-87所示,两个独立的能产生不同极数旋转磁场的定子绕组能实现电动机的两个转速,而且两个转速可以是一个任意整数的比,如3∶4。
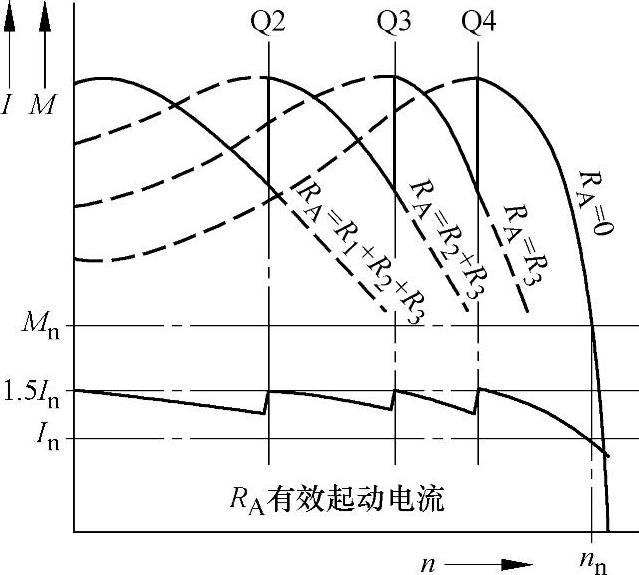
图13-86 有三级起动电阻的集电环电动机的转矩与起动电流
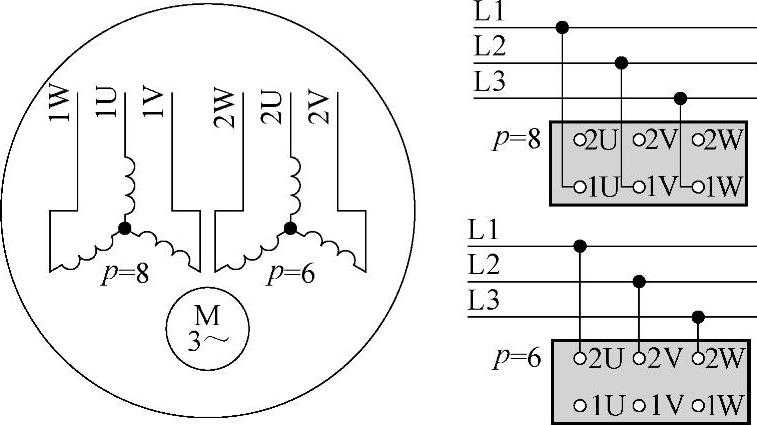
图13-87 有两个独立定子绕组的可换式电动机
在两个转速下电动机的转矩基本相同,功率比与转速比相同。
这种具有两个独立定子绕组的电动机所使用的绕组和电工钢板较多,因此只适用于转速比要求一定的情况,而对于转速比为1∶2则不适宜。如图13-87所示,这种电动机的接线盒内原则上只引出绕组的始端。
(2)具有分段定子绕组的电动机(达兰得线路) 达兰得接法是把定子绕组的每个相分成两部分,通过把线圈组从串联转换为并联,则可使旋转磁场的极对数减半,如图13-88所示,由此旋转磁场转速加倍。
如图13-89所示,常用的达兰得线路是三角形/双星形线路。串联绕组部分为相三角形耦合,而并联绕组部分为相星形耦合,以此通过降低电压来避免定子槽区内出现太大的感应。尽管转速提高2倍,但电动机功率仅提高1.5倍,转矩与两个转速相同,所以这种电路特别适用于机床等恒定转矩设备的动力源。
达兰得线路通过极对数减半而使其转速加倍。
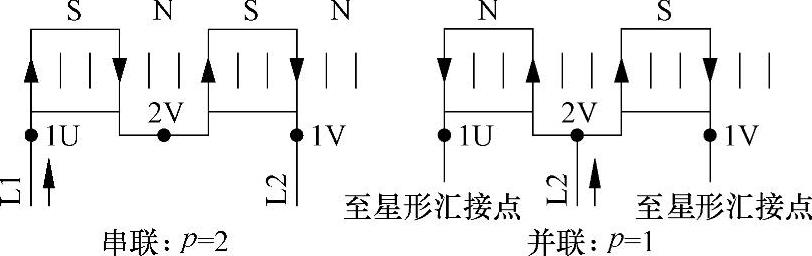
图13-88 达兰得线路原理(仅表示一个相)
如图13-89所示,由于绕组部分多半均已接到定子绕组上,所以具有达兰得线路电动机的接线板对于每个极对数有3个接线端子,因此,电动机可只在一个网电压下运行。其中用1U、1V和1W表示的接线端子用于低速运行,而用2U、2V和2W表示的接线端子用于高速运行,为了保证电动机变极后转速保持不变,已由制造商把端子标志1U和1W对调过。
电动机是由两个独立并分段的绕组制成,因此最大可有4种转速。在特殊情况下,可换极电动机也可以制成双星形-三角形(
 /△)转换或星形-双星形(
/△)转换或星形-双星形( /
/
 )转换。具有
)转换。具有
 /△转换的电动机,在两个转速级时的功率相同,而具有
/△转换的电动机,在两个转速级时的功率相同,而具有 /
/
 转换的电动机,在两倍转速时,其转矩为4倍(如用于鼓风机的电动机)。
转换的电动机,在两倍转速时,其转矩为4倍(如用于鼓风机的电动机)。
13.2.2.7 三相异步电动机的制动运行
在电动机拖动系统中常常会遇到电动机制动运行,如起重机下降和机床的快速停车等。在制动过程中,转子的动能和其所驱动的做功机械的功能都将转变为其他形式的能,因此,人们常采用的是机械制动法和电制动法。在制动时,动能转变为热能,称之为有损耗制动。有效制动时动能转变为电能(见提要)。
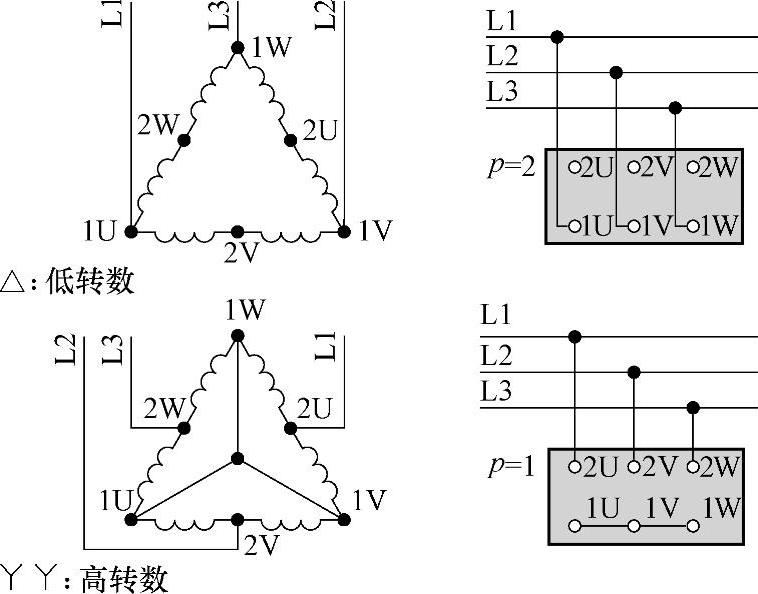
图13-89 具有达兰得绕组的可换极电动机(三角形/双星形)
提要:
三相异步电动机的制动方法
•有损耗制动
——机械制动法
——反向电流制动
——直流制动
•有效制动
——发电机制动
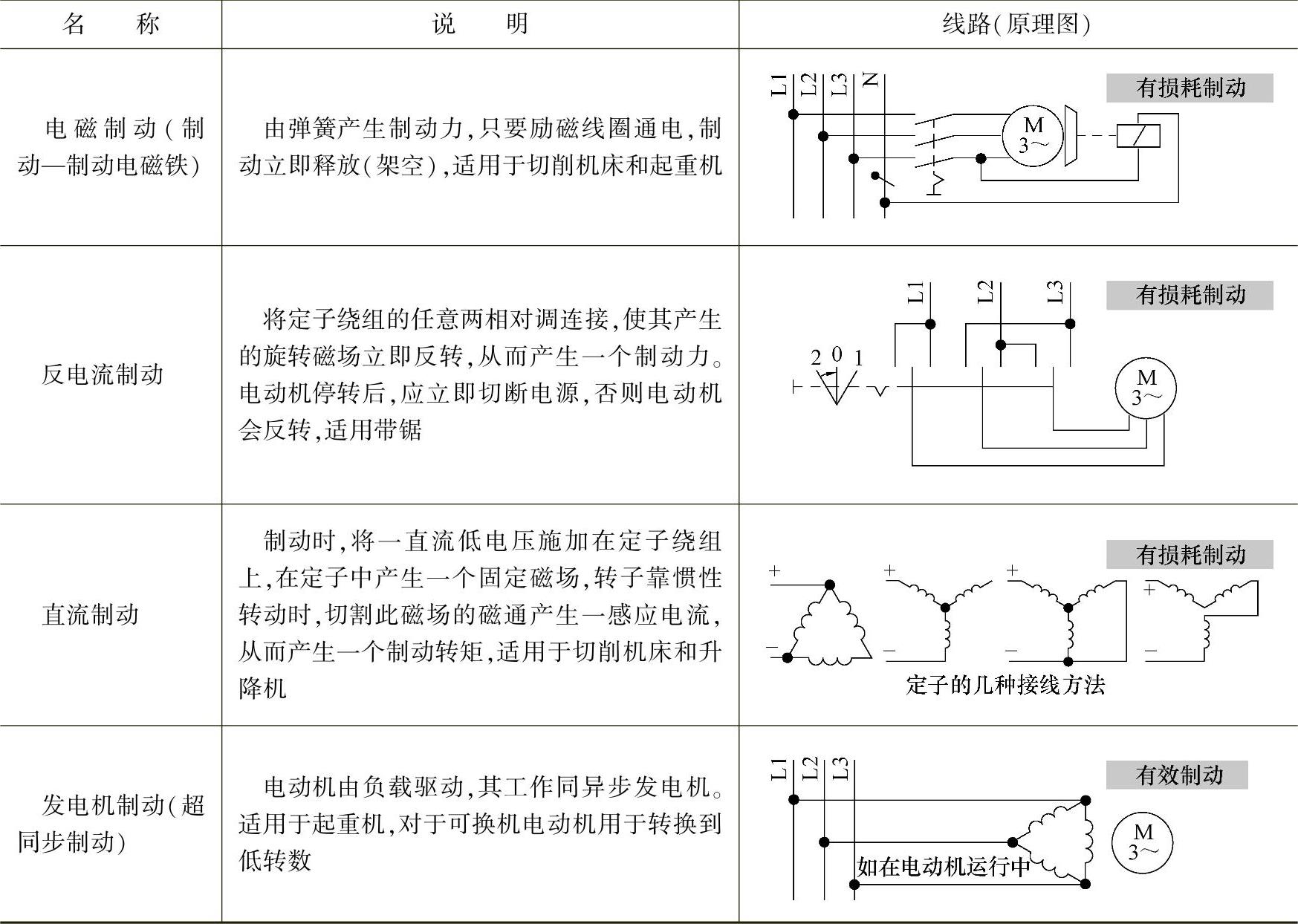
机械制动法(表13-6)是以制动块闸制动或以盘式制动器制动。在制动块上形成损耗热,这不是绕组负载。这种制动方法大多是由弹簧力实施制动,由电磁(吸入式电磁铁)实施制动释放。电网电压中断时,吸入式电磁铁释放,电动机制动释放。特殊制动电动机有一个同时起吸入式电磁铁作用的转子(自刹车电动机)。
表13-6 三相交流异步电动机制动方法
电制动法是利用对在磁场中运动的有电流流通的导体的制动作用(楞次定律)。由于在转子感应出的线电流的大小与转数有关,所以制动作用随转速的降低而减小。
电制动方是一种无接触、无磨损的制动方法。
反向电流制动与直流制动。这两种制动方法是将机器的动能转变为热能,因此,绕组是受热负载。对于反向电流制动,由于旋转磁场的换极而在转子上感应出大电流,所以其热负载特别大。为了避免由此而引起以相反旋转方向再次起动,则使用了制动接触器,以使电动机达到静止状态时断开电路。
发电机制动是利用负载的驱动能,以便在过同步转速(过同步制动:转子转数>旋转磁场转数)时把电动机作为发电机驱动。
13.2.2.8 三相交流直线电动机
如图13-90所示,直线电动机是一种引起直线运动力的驱动机。
为了更好地理解直线电动机,可以想象成将三相异步电动机的定子沿一测剪开,然后再铺平展开。如果在此展开的三相绕组中通以三相电流,则磁极在一个方向上,如从右向左移动,于是则产生一个移动磁场而不是旋转磁场。
直线电动机的作用是一个移动磁场。
(1)结构 如图13-91所示,与三相交流电动机定子相对应的部分,在直线电动机中称为感应器。它是由一个梳形的感应硅钢片和一组嵌在槽内的三相交流绕组组成。通常采用两个相对安装的感应器,当然,有时也采用一个感应器。

图13-90 直线电动机驱动的磁浮列车
直线电动机与笼型转子相对应的部分称为电枢。在两个感应器之间布置有一个由铝制成的实心导体。如果电框是由钢管铁磁材料制成,则可省掉其中的一个感应器,这是因为磁力线会通过钢板而到达感应器的另一极。钢电枢上也可以覆盖一层铝导电材料。
(2)工作原理 感应器的移动磁场在电枢中感应生成涡流,根据楞次定律,其方向应阻止移动磁场的感应作用,在感应器移动磁场和涡流的相互作用下,使在电枢上产生一个与移动磁场方向相同的电磁力,若感应器是固定不动的,而电枢是可动的,则电枢便顺磁场的移动方向移动;反之,若感应器可动,而电枢为固定不动,则感应器则是沿移动磁场相反方向移动。
直线电动机不是感应器移动,就是电枢移动。
(3)运行特性 直线电动机的作用泵与异步电动机的工作原理相同。移动磁场的速度与电源频率及感应器的磁极布置有关。为了在电枢中产生感应作用,则需要一个转差率。在负载时因为直线电动机的气隙和电枢电阻较大,所以其转差率会超过50%,因此直线电动机运行速度远低于移动场速度。
如图13-92所示,直线电动机转差率很大,起动时力最大。
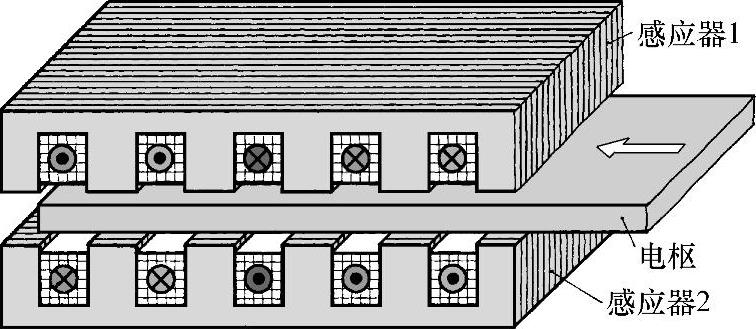
图13-91 有两个感器的直线电动机
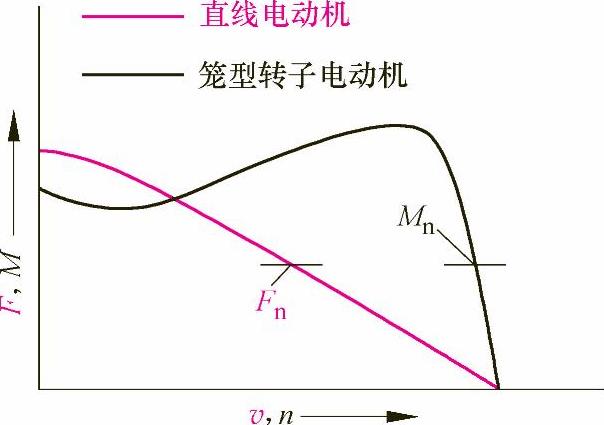
图13-92 直线电动机与笼型 转子电动机的特性曲线
(4)应用 直线电动机主要用于材料输送、传送带、大门和高速机车的拖动。
13.2.2.9 同步电动机
(1)结构 同步电动机的定子结构同异步电动机的定子结构。定子叠片铁心中安装三相绕组用来产生旋转磁场,转子铁心做成实心或叠片状磁极,并在上面绕有励磁绕组,通过集电环与直流电相接,相当于电磁铁(凸极式转子),其极数与定子绕组产生的旋转磁场的极数应相等。小型电动机的转子,也可以用永久磁铁制定。
(2)工作原理 接通时,定子旋转磁场立即有一个小极数及与电网频率相应的转速。转子的磁极由于与定子旋转磁场的极性不同而吸引,在短时间后,当其极性相同时而排斥。凸板转子由于其惯性而不立即跟上旋转转速。
通过起动辅助转子达到接近旋转磁场转速,转子以旋转磁场转速的同步转速在磁拉力作用下继续旋转(图13-93)。
同步电动机起动时必须要有特殊的起动辅助。
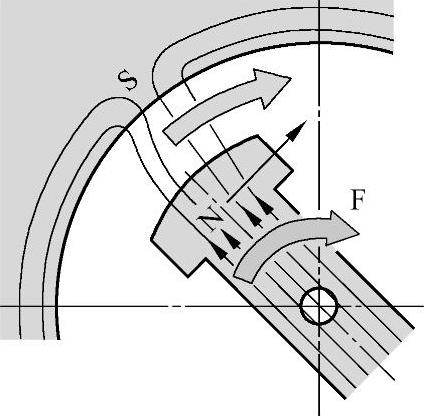
图13-93 作用在转子上的力
用一个可把同步电动机作为异步电动机起动的附加短路绕组作为转子辅助。在接通励磁电流后,便可作为同步电动机继续运行。在异步起动时,应通过一个绕组来接通励磁绕组,以使在其内所感应出的电压不会击穿绕组绝缘。在运行中,在发生负载冲击时,短路绕组能阻止转子摆动,因此把这种绕组称为阻尼绕组。
(3)工作特性 如图13-94所示,起动后,同步电动机以旋转磁场的转速旋转。若电动机带负载,则电枢磁场磁极轴线和转子磁极轴线之间存在一个夹角,即同步电动机带负载后转子磁场磁极落后于电枢磁场磁极,即空载时的转子磁场磁极一个角度θ,此角度称为功率角。
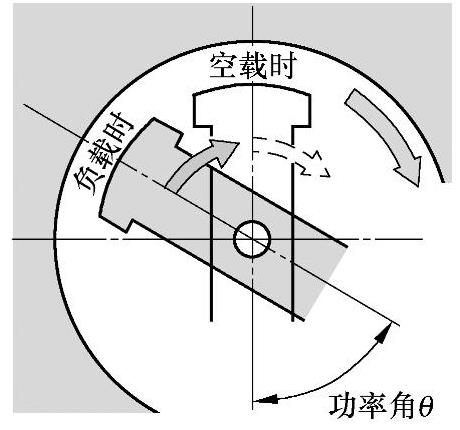
图13-94 同步电动机的功率角
同步电动机在负载时,也有旋转磁场转速。
功率角越大,则转矩越大。在定子两个极的中间位置,在此位置时因为转子磁极既受到前面定子磁极的吸力,又受到后面定子磁极的斥力,所以转子受到的力最大。对于双极电动机,功率角为90°。当功率角增大时,前面定子磁极对转子磁极的吸引力加强。如图13-95所示,当在定子两个磁极之间时,转子的转矩最大(极限转矩)。
极限转矩出现在90°时的功率角。
同步电动机的极限转矩为其测定转矩的两倍。在负载时,通过极限转矩切断定子与转子之间的磁联系。转子停留在无阻尼绕组。同步电动机对于电压降的灵敏度低于异步电动机。如图13-95所示,旋转磁场的磁通密度和电磁转矩随电压同比例下降。

图13-95 转矩与功率角的关系
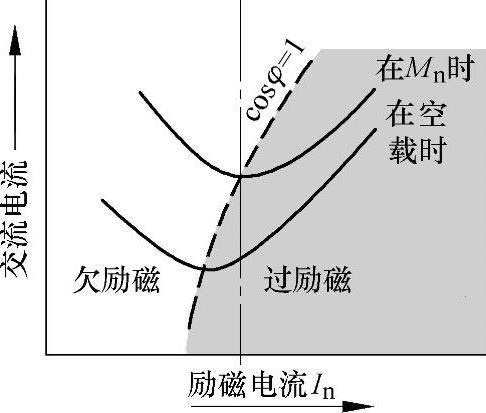
图13-96 作为相移器的同步电动机
以高于额定励磁电流运行的同步电动机称过励磁运行。电动机同时起着一个如同发电机的作用,并向电网提供感应无功功率(图13-96),因此,同步电动机可以作为相移器来使用。在过励磁运行时,它像一个补偿电容器用于无功电流补偿;在欠励磁运行时,同步电动机从电网中接受感应无功功率。
由于其转数恒定,所以同步电动机也可以作为图13-97所示的小型同步电动机来使用。这种电动机有永磁铁转子并按分割磁极原理工作,它用于电钟表、程序换接设备、时间继电器以及测量记录仪的拖动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。