



图9-203所示是以整流器工作的一台直流电动机,一旦在整流器输出端形成反向电压,则电动机便立即转动。如当触发角α触发延迟时,电动机正好未从电网接受电能而以惯性继续转动时,则电动机以发电机方式工作。
对此,假设电压U0为正值,加速电动机,把α调到较小,则反向电压与转速一起升高。与减少的α值一起用于触发时间点的现有的称为触发时间中的电网电压时间值U1α的电网电压瞬时值增加到α=90°。
自90°起,此值按正弦规律又开始下降。在一个规定的触发角时,如图9-204所示,反向电压U0与电网电压时间值U1α有相同的值,因此,在E1C电路中的晶闸管上不再有正的阳极-阴极电压。在小的触发角时,晶闸管甚至于在截止方向上极化。晶闸管不再触发,直到转速和反向电压下降为止,晶闸管又获得正向电压。

图9-203 E1C电路中的直流电动机
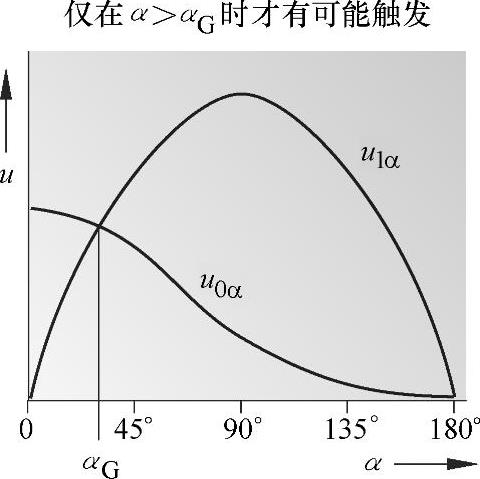
图9-204 整流器同步极限角αG
这就是所说的“整流器失去同步”。相应的触发角称为整流器同步极限角αG。某些控制有一个用于限制控制电压的调节器以使之不低于UG。
当然限制是有缺点的,要确定在一个规定的转速和负载上。负载提高,则转速下降,其反向电压也下降。可能有较小的触发角,但由于限制了触发角而不能调整。在由静止状态到加速状态时,由于U0先是随转速的提高而增加,所以可能存在接近α=0°的触发。
由于限制而使整流器不可能完全导通,因此使驱动加速缓慢。
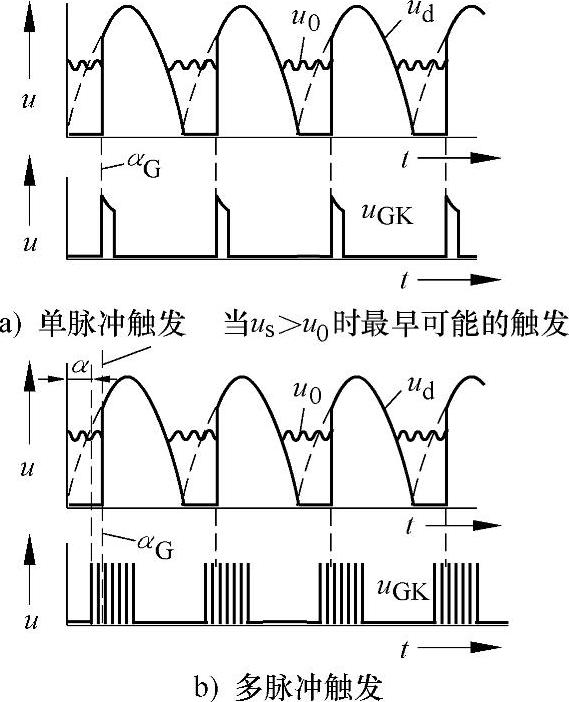
用多脉冲触发组件控制能达到自动控制。如图9-205所示,与单脉冲触发相反,在多脉冲工作中,在晶闸管上不仅有一个触发脉冲,而且还有一个完整的触发脉冲带。
把触发角调小,使晶闸管不可以再触发,一个后随脉冲将触发晶闸管。电网电压时间值超过正弦值,在U1>U0时,第一个脉冲触发晶闸管。
因此,驱动不是为了一个或多个半波,而是把触发延迟几度。
直流驱动时的多脉冲控制把可靠触发调节在整流器同步极限αG附近。
 (https://www.xing528.com)
(https://www.xing528.com)
图9-205 触发方法
最大通过电流角Θ在起动时较大,在工作中与单脉冲触发相同。
9.10.10.1 有晶闸管整流器的四象限驱动
使了使一台电机在所有的四个象限都能工作,则需要两个整流器。两个整流器的连接方法是,一个整流器承担正方向的通过电流,而另一个整流器则承担负方向的通过电路(反向并联整流器)。如图9-206所示,整流器I承担Ⅰ象限和Ⅳ象限的通过电流,负方向的通过电流(Ⅱ和Ⅲ象限)由整流器Ⅱ控制。两个整流器不允许同时导通,否则会在整流器之间有所谓的回路电流的短路电流流动,因此,两个整流器必须用一个回路电流隔离逻辑电路进行相互隔离,这就是所说的无回路电流驱动。
其他的可能性是用扼流圈(电感)限制回路电流。回路电流扼流圈用于阻止回路电流达到峰值。如图9-207所示,这种类型的电路有回路电流。这种电路的两个整流器可以无危险地同时导通。若要求I=0,则两个整流器的触发角必须相等,因此,电动机电流同样为零。无回路电流整流器的回路电流隔离逻辑获得不变的I=0的信息并交替地接通各整流器,然后再接通另一个整流器,驱动倾向于摆动。因为回路电流扼流圈有损耗,因此无回路电流整流器的效率较高。

图9-206 无回路电流驱动

图9-207 有回路电流的驱动
9.10.10.2 脉冲调节器驱动
必须极快加速和快速制动的驱动多数配备有直流调节器。如图9-208所示,由于在直流调节器输出端为电压脉冲,所以这种驱动也称为脉冲调节器。整流器的Q1和Q4必须同时导通,其电流为正向流动,经过整流器的Q2和Q3,电流以相反方向流动。一个分路副的整流器必须相互闭塞,因此供应电压未形成短路。这种驱动是以50kHz的脉冲频率工作。它对额定值变化的反应要比首先总是经过触发延迟的整流器驱动要快得非常多。由于高的开关操作频繁度,所以调节器大半是以FET或IGBT的结构形式。

图9-208 晶体管脉冲调节器驱动
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。