



图9-33所示的自动化立体仓库系统,主要由库房、堆垛机、货架、AGV、传输设备、存储设备、控制和管理系统等部分组成。
1.堆垛机
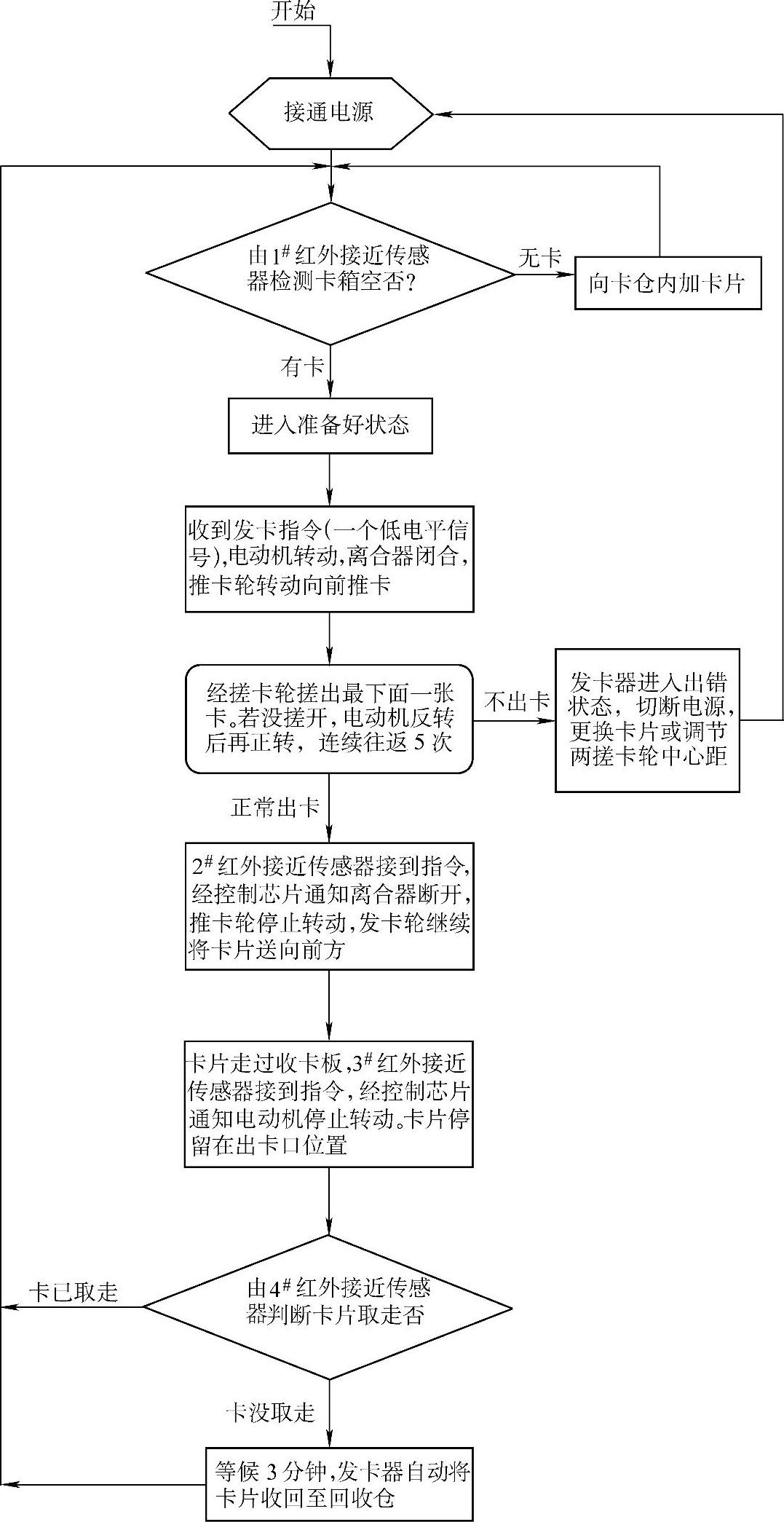
图9-31 TCD-300发卡器工作原理方框图
堆垛机是立体仓库内部的搬运设备。堆垛机可采用有轨或无轨方式,其控制原理与运输小车相似。仓库高度很高的立体仓库常采用有轨堆垛机。为增加稳定性,采用两条平行导轨,即天轨和地轨,如图9-34所示。堆垛机的运动有沿巷道的水平移动、升降台的垂直上下升降和货叉的伸缩。堆垛机上有检测水平移动和升降高度的传感器,辨认货物的位置,一旦找到需要的货位,在水平和垂直方向上制动,货叉将货物自动推入货格,或将货物从货格中取出。
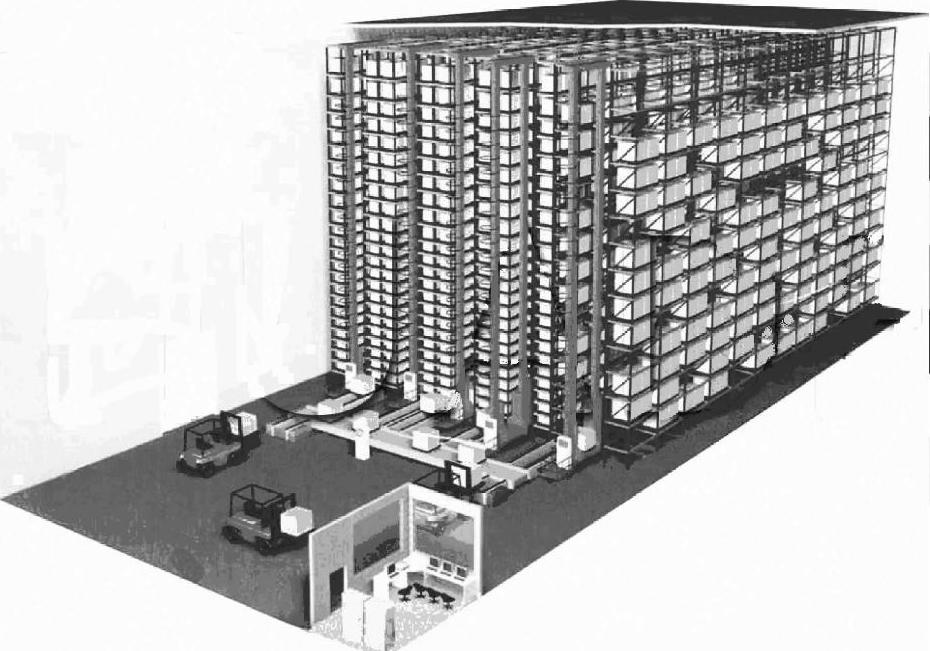
图9-32 自动化立体仓库

图9-33 自动化立体仓库的组成
1—堆垛机 2—高层货架 3—场内 4—场内AGV 5—中转货位 6—出入库传送滚道 7—场外AGV 8—中转货场
2.巷道转轨车
巷道转轨车的主要用途是将堆垛机从一巷道转入另一巷道,主要适用于出入库频率低并有三个巷道以上的仓库,如图9-35所示。
3.库内输送设备
库内输送设备由链条输送机、辊子输送机、升降台穿梭小车、托盘码拆机、外型检测装置、自动称重装置及出入库台等辅助设备组成,如图9-36所示。
4.货架
货架主要用于以托盘、货箱为载体的物料的储存。货架可分为组合横梁式、焊接牛腿式、隔板式、悬臂式和重力式,如图9-37所示。(https://www.xing528.com)

图9-34 堆垛机

图9-35 巷道转轨车

图9-36 库内输送设备
5.AGV
如图9-38所示的自动导向小车(AutomaticGuideVehicle,AGV)是一种无人驾驶的以蓄电池驱动的物料搬运设备,它通常由运输小车、地下电缆和控制器三部分组成,小车由蓄电池提供动力,沿着埋没在地板槽内的用交变电流激磁的电缆行走,地板槽埋没在地下4cm左右深处,地沟用环氧树脂灌封,形成光滑的地表,以便清扫和维护。导向电缆铺设的路线与车间工件的流动路线及仓库的布局相适应,AGV行走的路线一般可分为直线、分支、环路或网状。
为了实现工件的自动交接,小车装有托盘交换装置,以便与机床或装卸站之间进行自动联接。交换装置可以是辊轮式,利用辊轮与托盘间的摩擦力将托盘移进移出,这种装置一般与辊式传送带配套。交换装置也可以是滑动叉式,它利用往复运动的滑动叉将托盘推出或拉入,两边的支承滚子是为了减少移动时的摩擦力。升降台式交换装置是利用升降台将托盘升高,物料托架上的托物叉伸入托盘底部,升降台下降,托物叉回缩,将托盘移出。托盘移入的工作过程则相反。小车还装有升降对齐装置,以便消除工件交接时的高度差。

图9-37 货架

图9-38 自动导向小车AGV
6.计算机监控和管理系统
计算机监控系统是自动化立体仓库系统的重要组成部分,其主体由监控软件、监控计算机、网络接口、大屏幕显示器和巷道LED显示器组构成。通过网络接口与网络服务器、管理系统、堆垛机控制系统、出入库控制系统进行数据交换,实现对立体仓库自动化设备的运行数据采集、作业调度和监督控制,使控制设备能够根据系统要求高效、准确和可靠地工作,实现货物的自动存储及发送。自动化立体仓库计算机监控管理系统结构图如图9-39所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。