



图6-20所示为现代汽车电子巡航控制系统的构造与零部件布置图。电子巡航控制系统主要是由指令开关、传感器、电子控制器和节气门执行器四部分组成。各种开关与计算机被配置在车室内;执行元件、真空泵则配置在发动机室内,执行元件的控制线缆与加速踏板相联接。
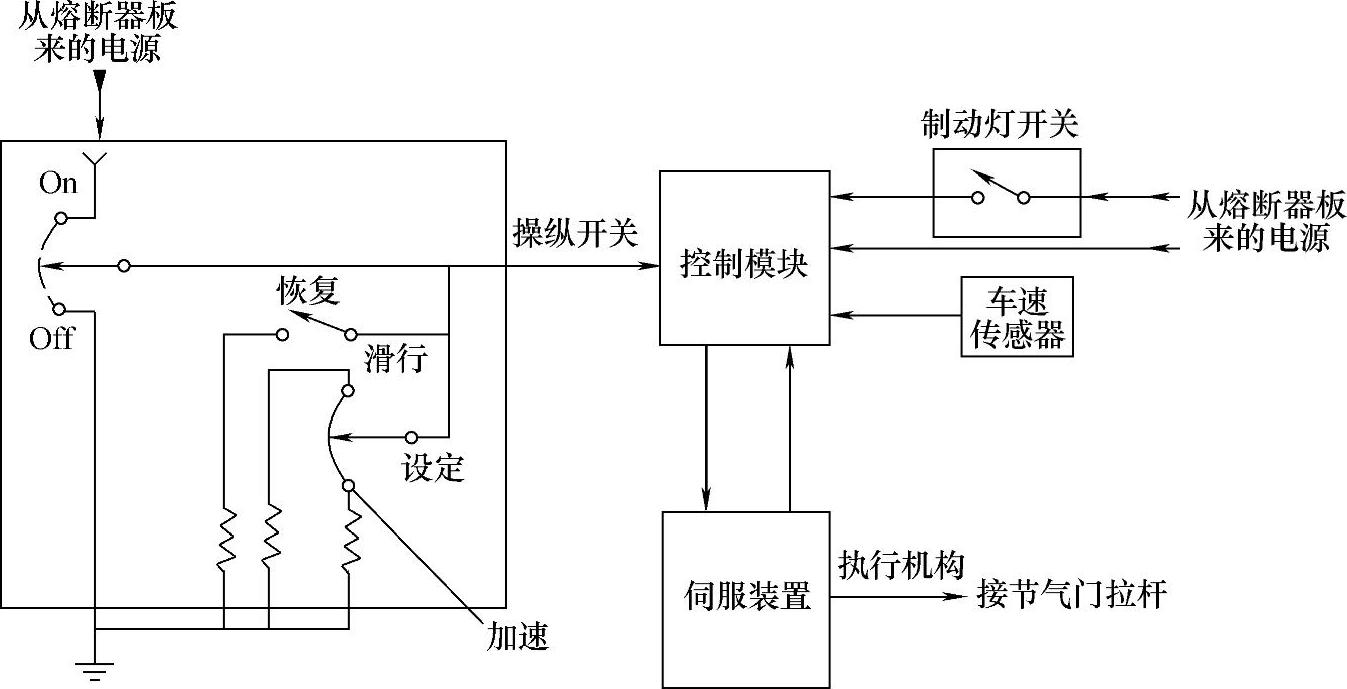
图6-20 电子巡航控制系统的构成
1.指令开关
指令开关包括主控开关、离合器开关、变速器空档启动开关、制动开关(包括驻车制动)和电源开关(点火开关)等。
1)主控开关的作用是控制巡航系统的启动、关闭,控制调节巡航工作状态。
2)离合器开关(仅对安装手动变速器车辆)的作用是:当汽车在巡航状态下行驶,出现驾驶员干预,如变换变速器档位、制动等情况,驾驶员踩踏离合器踏板,离合器开关即由断开变为闭合,离合器开关的闭合,使电控单元立即自动关闭巡航工作状态。离合器开关装在驾驶室离合器踏板的上部,靠驾驶员踩踏离合器踏板的机械动作使其闭合。
3)变速器空档启动开关(仅对安装自动变速器车辆)的作用与离合器开关类似。空档启动开关的安装位置紧靠变速器操纵杆,并与变速器操纵杆联动,当变速器操纵杆置于空档时,空档启动开关由断开变成闭合。
4)刹车灯开关的作用是:当驾驶员踩踏制动踏板时,在制动(接通)灯亮的同时,将控制节气门动作摇臂的电磁离合器断开,迅速退出巡航控制的工作状态。在刹车灯开关中原来常开触点的基础上,增加了与之联动的常闭触点。当驾驶员踩踏制动踏板,制动灯亮的同时,常闭触点断开,电磁离合器断电,节气门不再受巡航系统控制。
5)驻车制动开关的作用与离合器开关(变速器空档启动开关)类似。安装位置紧靠驻车制动操纵杆并与驻车制动操纵杆联动。当拉驻车制动时,此开关由断开变为闭合。
6)点火开关的主要作用是通断取自蓄电池和发电机的巡航控制的工作电源。
2.传感器
传感器主要包括车速传感器、节气门传感器和节气门控制摇臂位置传感器等。
1)车速传感器通常和车速里程表驱动装置相连。如果车速表是电子式的,车速表传感器给出的信号可直接用作巡航控制系统的反馈信号,因而不必为巡航控制系统另外设置传感器。专用于巡航控制系统的车速传感器一般安装在汽车变速器输出轴上,因为实际车速与变速器输出轴转速成正比。车速传感器有光电式、霍尔感应式、磁阻式等多种结构形式。最简单巨最常用的是磁阻式,其结构如图6-21所示。
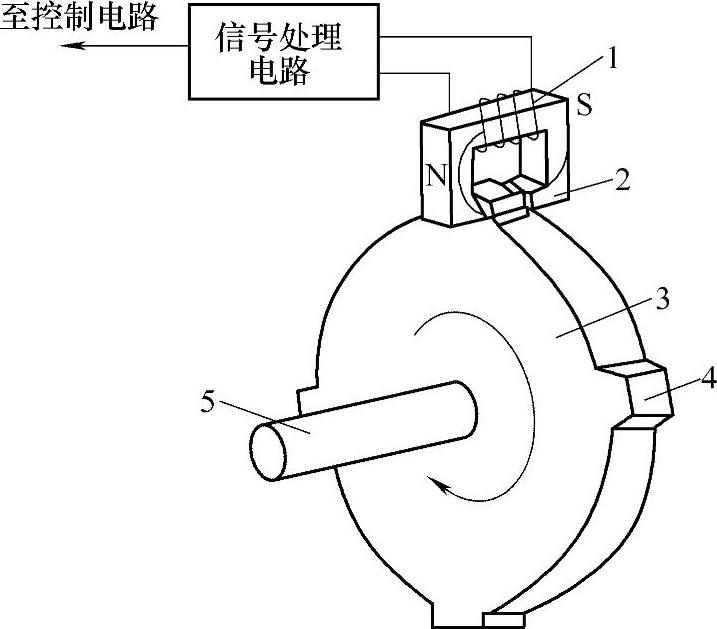
图6-21 磁阻式车速传感器结构图
1—传感线圈 2—磁铁 3—钢盘 4—凸轮 5—变速器输出轴
带凸齿的钢制圆盘安装在变速器输出轴上并随输出轴一起转动。当凸齿位于磁铁两极之间时,由于钢的导磁性能远高于空气隙,磁回路磁阻突然减小,从而在传感线圈中产生一高的脉冲电压信号。我们注意到变速器输出轴每转一周,四个凸齿各通过传感线圈一次。因此信号处理电路计数一分钟内传感线圈中的电压脉冲数除以4就可得到r/min表示的变速器输出轴转速。
2)节气门传感器的作用是:对电控单元提供一个与节气门位置成比例变化的电信号。节气门传感器与发动机电控的传感器共用。
3)节气门控制摇臂传感器,这是巡航控制系统专用的传感器。它的作用是对电控单元提供节气门控制摇臂位置的电信号,目前应用较多的是滑线电位计式。当节气门控制摇臂转动时,电位计与之转动,便输出一个与控制摇臂位置成比例、连续变化的电信号。
3.执行器(https://www.xing528.com)
执行器作用是将电控单元输出的电流或电压信号转变为机械运动,进而控制节气门的开度,最终达到控制车速的目的。执行器有电动和气动操纵两种形式。
1)气动方式大多采用有进气歧管真空度控制的气动活塞式结构。气动操作的节气门执行器的组成如图6-22所示。
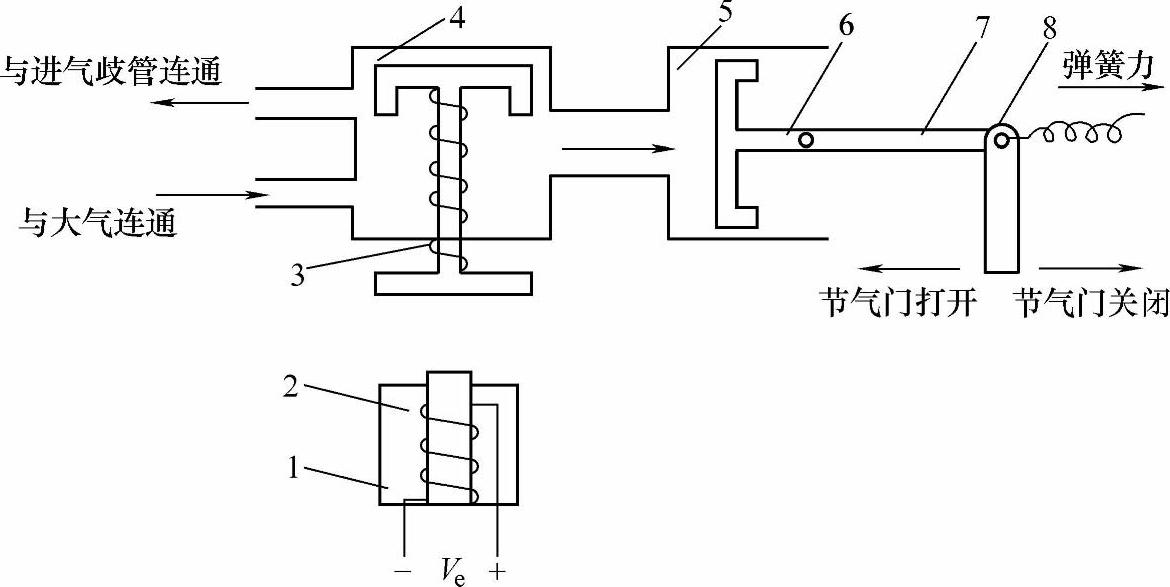
图6-22 气动操纵的节气门执行器的原理图
1—电磁铁 2—电磁线圈 3—阀弹簧 4—压力控制阀 5—气缸 6—活塞 7—连杆 8—节气门拉杆
执行器活塞连杆与节气门拉杆相连,而活塞连杆对节气门拉杆无力作用时,弹簧力使节气门关闭。当执行器输入信号Ve给电磁线圈通电时,压力控制阀芯克服阀弹簧力下移,执行器气缸与进气歧管连通。由于进气歧管内为真空,于是执行器气缸压力迅速下降,执行器活塞带动节气门拉杆向左运动从而使节气门平顺渐进地打开。活塞上的作用力随气缸中平均压力的变化而变化,而气缸中的平均压力则通过快速通断压力控制阀来控制。执行器的输入信号Ve是一脉冲电压信号,当Ve电位为高时,电磁铁通电;当Ve电位为低时,电磁铁断电。因此气缸中的平均压力亦即节气门开度与压力控制阀控制信号Ve的占空比成正比。
2)电动机式类型。电动机式的节气门执行器的工作,是利用电动机的转动并带动控制摇臂摆动,可使节气门的开度变化,主要有电磁离合器、直流电动机或步进电动机等。直流电动机是连续运转,它的运转速度与电控单元供给它的电压平均值有关;它的运转或停止,由电控单元输出的电压“有”或“无”来决定;它的运转方向,由电控单元输出的电压方向决定。步进电动机的工作,是对其通电一次,电动机轴就转过一定的角度。
电磁离合器的作用是,当电磁离合器通电时,电动机的轴与节气门控制摇臂结合在一起,当电磁离合器断电时,电动机轴与节气门控制摇臂分离,使节气门受到电动机和电磁离合器的双重控制,工作更可靠。
4.电子控制器
电子巡航控制系统的另一个重要部件就是电子控制器,也称为巡航电脑。控制器是整个控制系统的中枢。在早期的巡航控制系统中,控制器大多采用模拟电子技术,其原理图如图6-23所示。
整个控制器采用了4个运算放大器,每个放大器都有自己特定的用途。运算放大器1用作误差信号放大器,它的输出与指令车速和实际车速之差成正比。误差信号Ve用作运算放大器2和3的输入。运算放大器2是一个放大倍数为KP=-R2/R1的线性放大器,由于R1是可变的,因此放大倍数可以调节。运算放大器3是一个积分器,其放大倍数为KI=1/(R3)C。R3是可变电阻,因而KI也可调。运算放大器3产生一流向电容C的电流,其电流与流经R3的电流相等。R3两端的电压即为误差放大器的输出电压Ve。根据欧姆定律,可得R3上的电流为:I=Ve/R3。
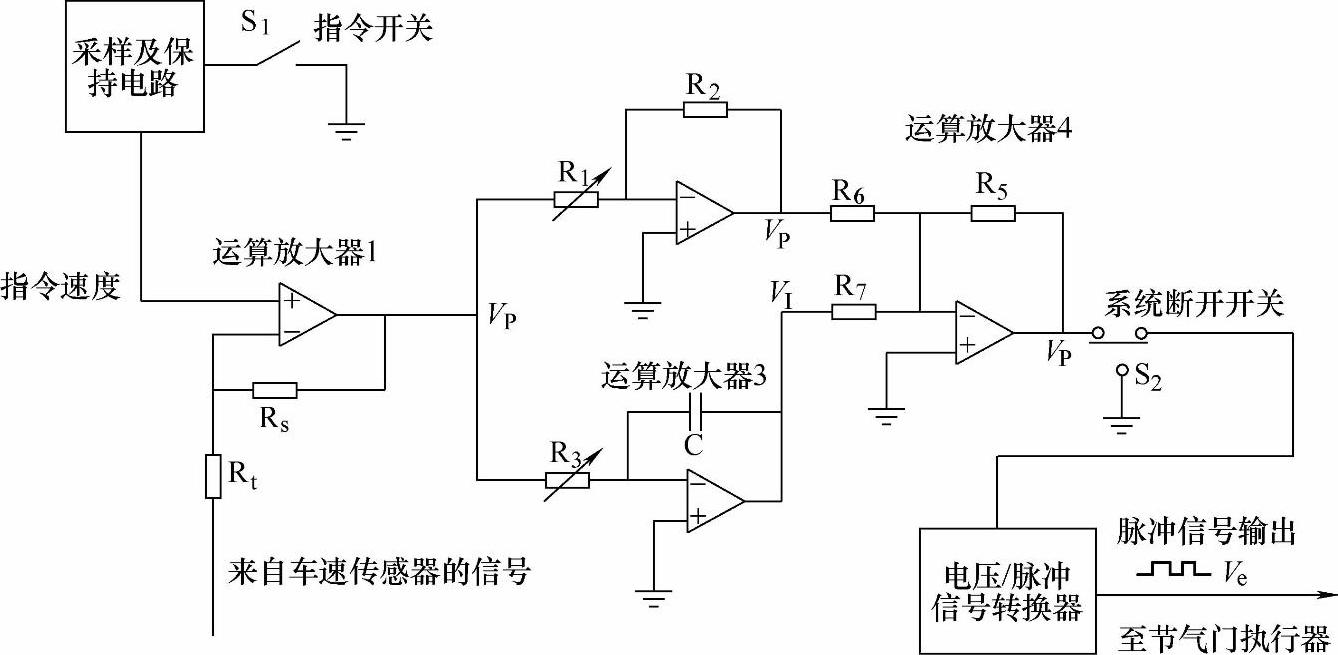
图6-23 采用模拟电子技术的控制器原理图
若误差信号Ve保持不变,则电流I也保持不变。电容C两端的电压将以与电流成正比的速率稳定变化。积分器输出电压根据VI是大于0还是小于0而上下变化,仅当误差恰好为0时才保持不变。这就是为什么积分放大器能将系统的稳态误差降至0的原因。因为只要出现小的误差就会引起VI变化从而予以修正。当然,实际上为了避免游车现象,并不是将车速误差真正降为0,而是保持在一定的误差范围内。误差范围的大小决定于控制线斜率,亦即KI的大小。
线性放大器和积分放大器的输出通过运算放大器4叠加在一起,运算放大器4将电压Vp和VI相加并将运算结果反相。这里反相是必要的,因为线性放大器和积分放大器的输出相位与其输入相位是相反的。求和反相后方使控制信号回到正确的极性。运算放大器4产生一模拟电压输出Vs。这个模拟电压必需先转换成脉冲信号才能驱动油门执行器。为此采用了一个将模拟电压转换为电压脉冲信号的转换器。转换器的输出Ve直接驱动执行器的电磁线圈。
图6-23中有两个开关S1和S2。指令开关S1由驾驶员置位用来选定指令车速,它向采样及保持电路发送信号让其对已选定的指令车速采样并记忆下来。采样及保持电路的原理图如图6-24所示。
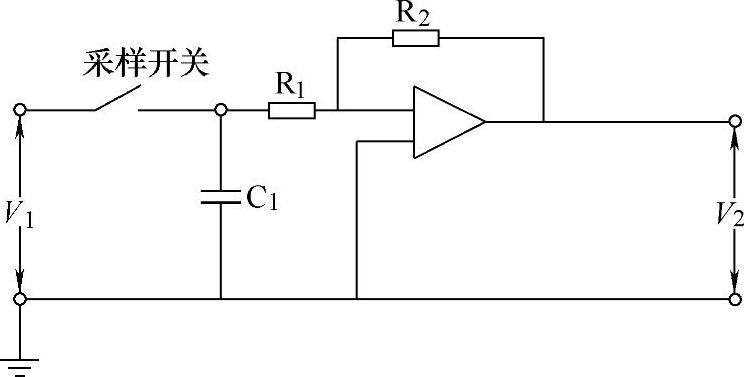
图6-24 采样及保持电路原理图
V1表示由驾驶员选定的指令车速信号,V1采样后向电容C1充电。电容器电荷由一个具有高输入阻抗的放大器进行检测。运算放大器向误差信号放大器输出一个与指令车速成正比的电压V2。开关S2通过中断油门执行器的控制信号来断开巡航控制执行器。当点火开关断开,控制器断开或制动踏板踩下时,开关S2就会自动将系统断开。当驾驶员接通指令速度开关S1时,开关S2就接通。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。