



【摘要】:带有制动进退式光电定位系统的包装机传动系统如图5-7所示。另一路则经无级变速差动机构12的调节,可以手动或通过单相伺服电动机控制完成。最后一路经差动机构19到钩爪输送链。差动机构19为自动调整机构,主要用来调节钩爪输送链与横封头同步。在包装过程中,用光电传感器检测包装纸移动速度与横封速度作比较,判别它是慢是快,通过超越离合器电气系统控制超越电机M3动作使之运转或制动停止,以达到误差补偿的目的。
带有制动进退式光电定位系统的包装机传动系统如图5-7所示。
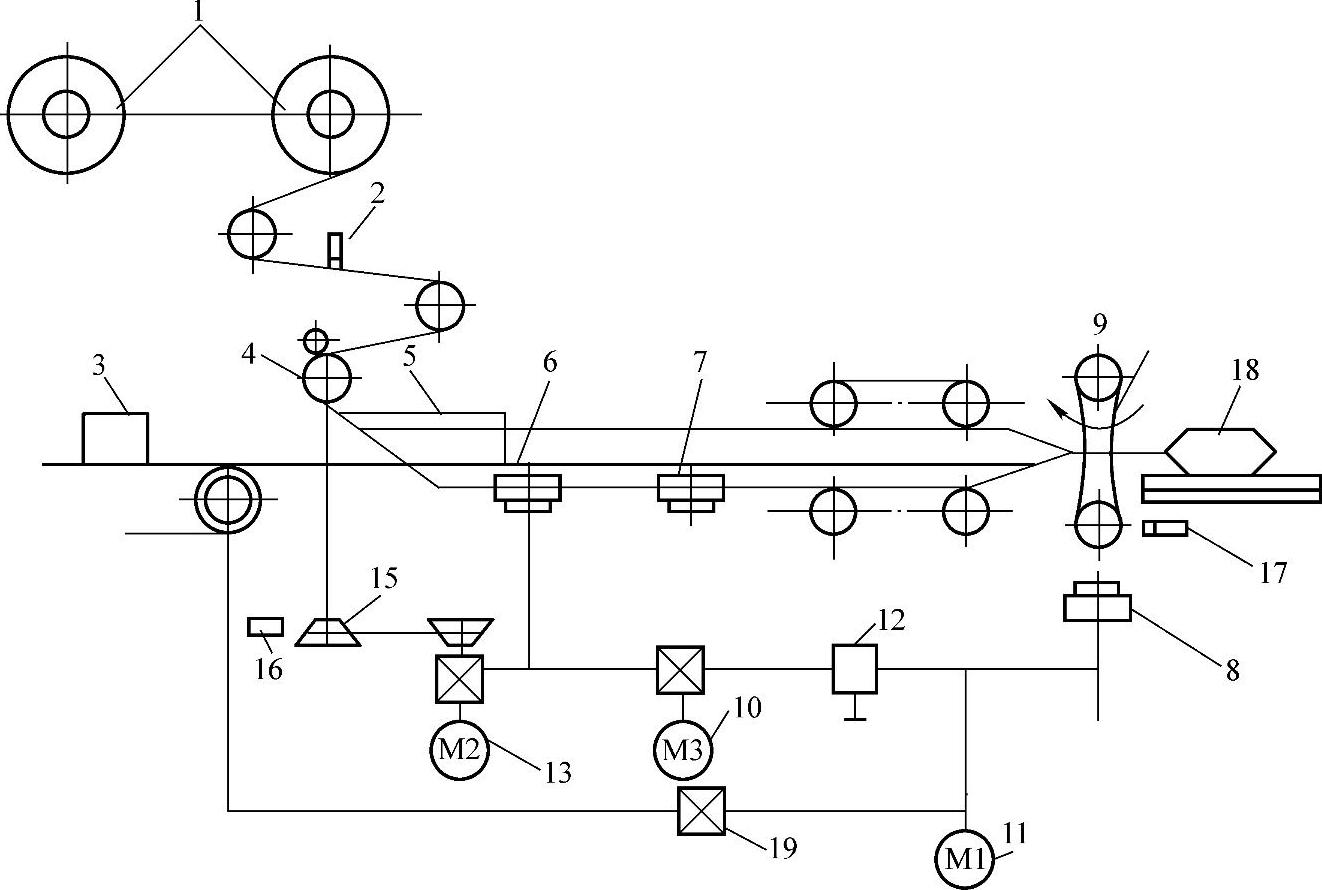
包装过程如下:片状包装纸由卷筒1引出,经光电检测器2再由成形器5成形和牵引辊6,纵封辊7制成包装。已充填包装物的包装袋上下整形输出,经输送带送到横封头8横封并切断排出成品。传动部分是:主电机M1将运动传入横封传动轴,再经不等速机构9带动横封头传动,不等速机构用来调整横封头8的封切瞬时速度,使之与包装袋移动速度同步。另一路则经无级变速差动机构12的调节,可以手动或通过单相伺服电动机控制完成。调节无级变速差动机构12可以得到所需袋长。最后一路经差动机构19到钩爪输送链。差动机构19为自动调整机构,主要用来调节钩爪输送链与横封头同步。
在包装过程中,用光电传感器检测包装纸移动速度与横封速度作比较,判别它是慢是快,通过超越离合器电气系统控制超越电机M3动作使之运转或制动停止,以达到误差补偿的目的。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-7 包装机传动系统图
1—卷筒 2—反射光电检测器 3—包装物 4—下纸辊轮 5—成形器 6—牵引辊 7—纵封辊 8—横封头 9—不等速机构 10—超越离合器 11—主电动机 12—无级变速差动机构 13—伺服电动机 14—输送机构 15—调速机构 16—送纸光电传感器 17—横封光电传感器 18—成品 19—钩爪差动机构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。