



1.单一微机器人系统
微机器人系统通常是将微传感器、微致动器、微操作器、微能源及控制单元等根据微机器人特定的功能巧妙地组合在一个微小的机体内。由于体积很小,不可能装载更多的元件,因此这一系统通常用于完成某种特定的单一任务。美国约翰逊宇航中心研制的一种由太阳能驱动的机器蝴蝶,其内部装有简单的控制系统,具有飞行功能,能被发射升空进入地球轨道以完成某些空间探测任务,并将信息传递给接收站。图4-74和图4-75所示为美国密歇根大学开发的伸缩移动式微机器人和爬墙微机器人。
图4-76所示为韩国微机器人公司的微机器人产品Hexavoider,它是一种可编程的活动微机器人,可独立地移动并巨具有躲避障碍物左右移动的功能。Hexavoider使用红外线的发射器和接收装置感应它周围的环境。它还有2条触角式天线,这些天线也具有感应障碍物的功能。Hexavoider使用C语言编程,用户可在自己的计算机中编程,并用闪速存储器把程序下载到机器人中,也可选择RF(无线电频率)模块,通过使用该模块,用户能直接用计算机中控制Hexavoider运动,当中间的一对腿控制机器人的运动时,前后腿起到移动的作用。Hexavoider由3台直流伺服电动机驱动。

图4-74 伸缩移动式微机器人
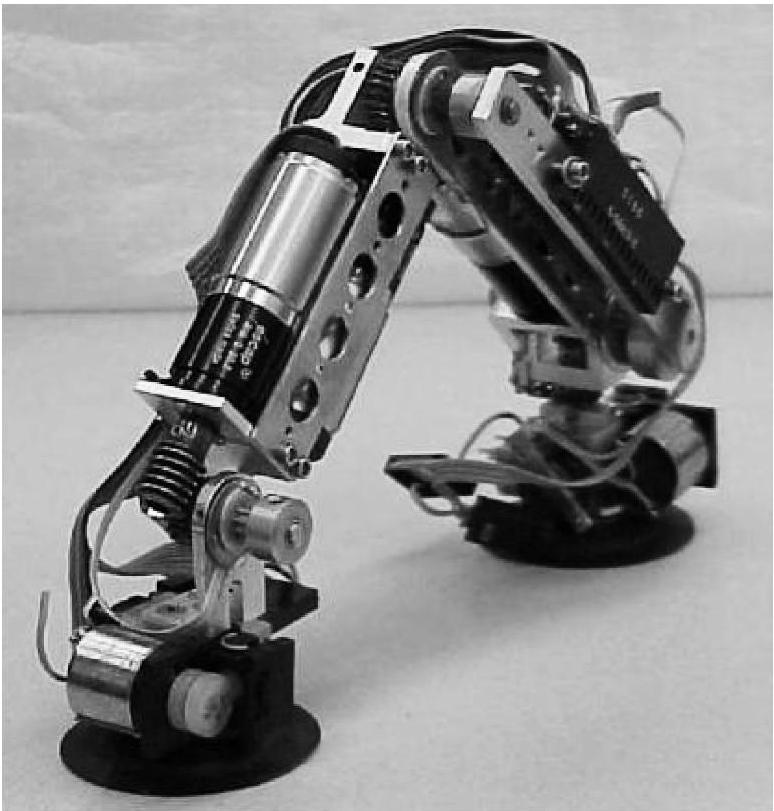
图4-75 爬墙微机器人
图4-77为一采用表面显微机械加工技术由硅模板制作的6足微机器人,外形尺寸为1cm×2cm。该微机器人的行进速度为1mm/s,耗电为微瓦级。(https://www.xing528.com)
2.多微机器人系统
单个微机器人一般只能担任单项或部分任务。当作业比较复杂时,就要求多台微机器人构成多级系统或机器人群,以便各司其职,相互补充,协调工作。
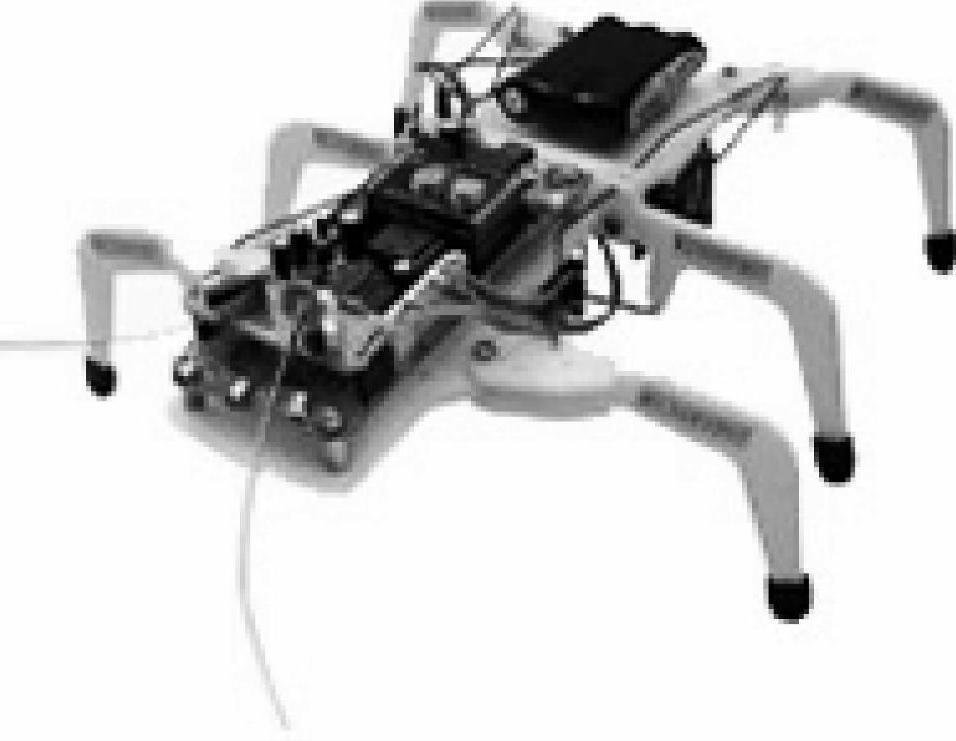
图4-76 微机器人Hexavoider
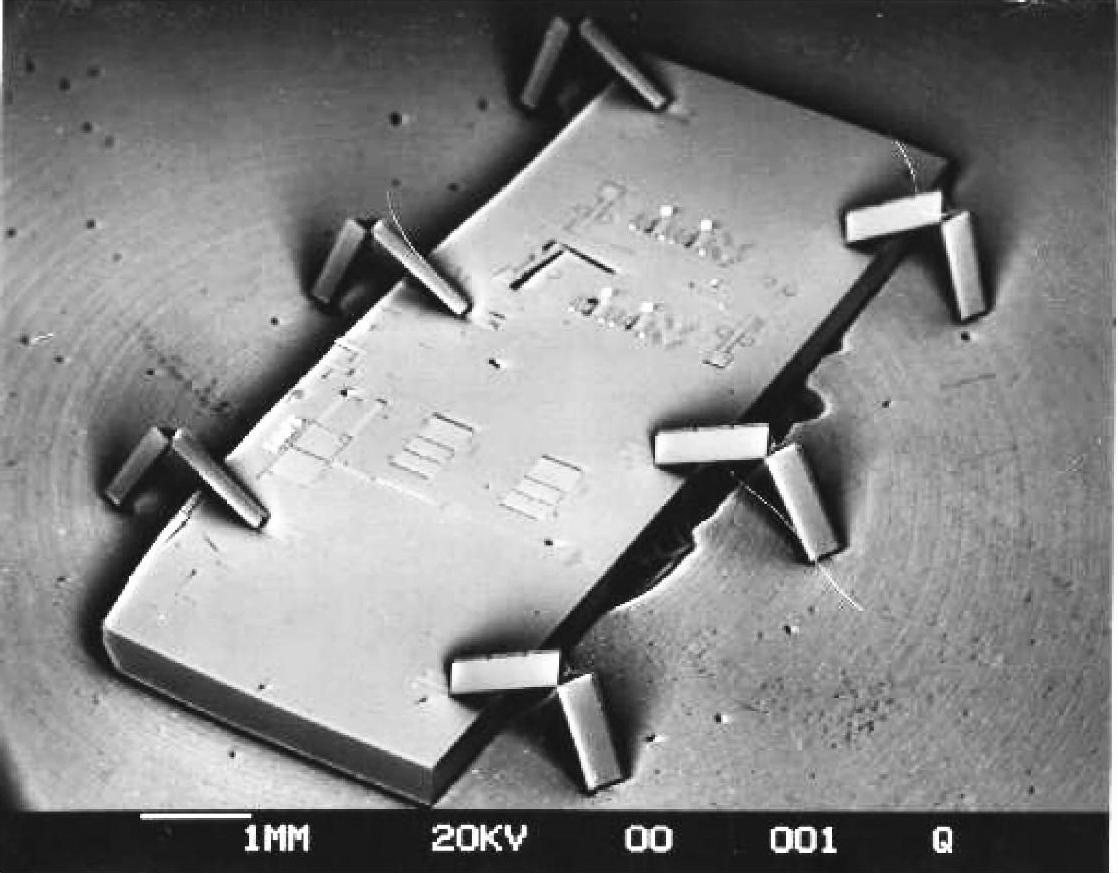
图4-77 硅模板6足微机器人
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。