



EPC—755A光电编码器具备良好的使用性能,在角度测量、位移测量时抗干扰能力很强,并具有稳定可靠的输出脉冲信号,巨该脉冲信号经计数后可得到被测量的数宇信号。汽车驾驶模拟器对方向盘旋转角度的测量选用EPC—755A光电编码器作为传感器,其输出电路选用集电极开路型,输出分辨率选用360个脉冲/圈,考虑到汽车方向盘转动是双向的,既可顺时针旋转,也可逆时针旋转,需要对编码器的输出信号鉴相后才能计数。图4-6给出了光电编码器实际使用的鉴相与双向计数电路,鉴相电路用1个D触发器和2个与非门组成,计数电路用3片74LS193组成。
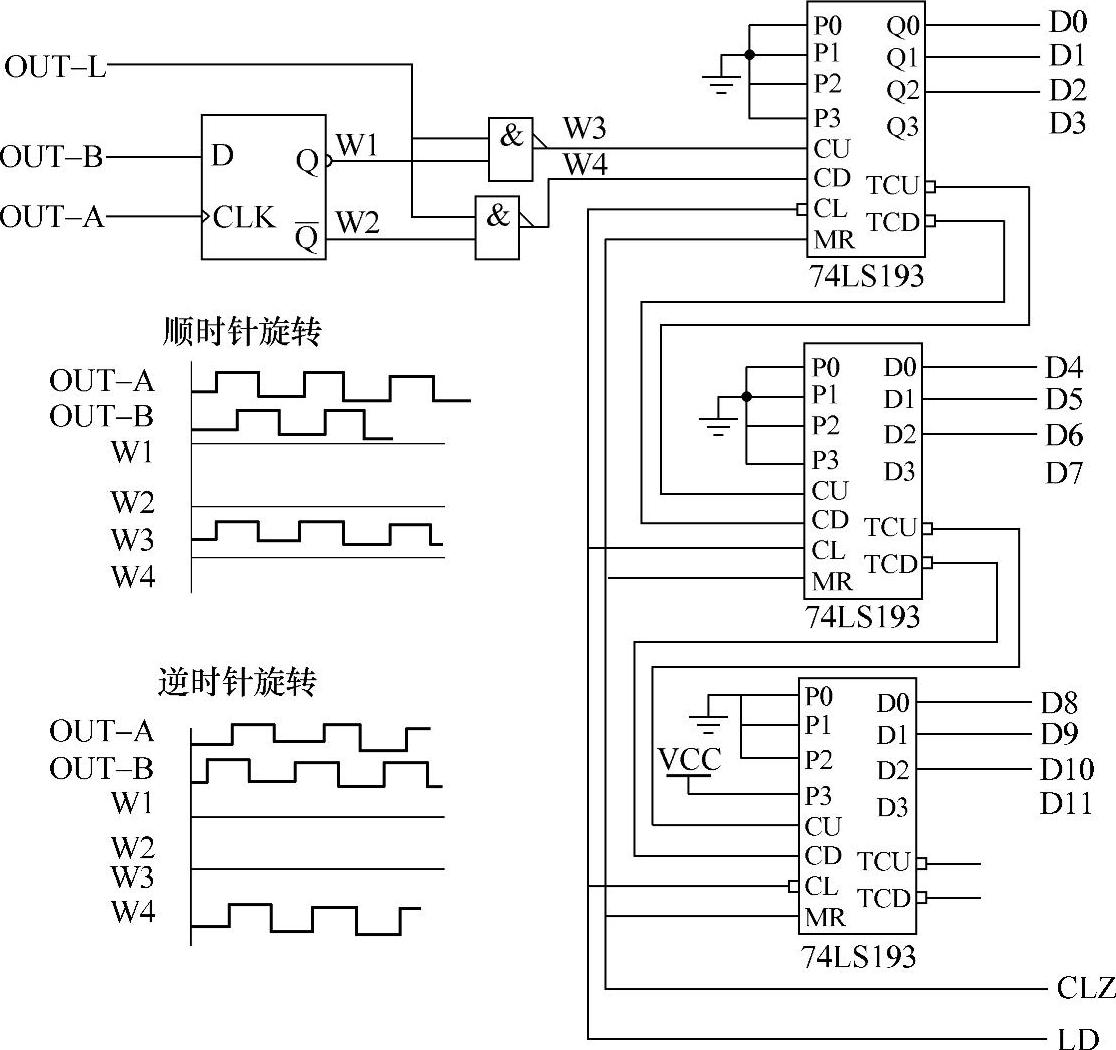
图4-6 光电编码器鉴相计数电路
当光电编码器顺时针旋转时,通道A输出波形超前通道B输出波形90°,D触发器输出Q(波形W1)为高电平,Q(波形W2)为低电平,上面与非门打开,计数脉冲通过(波形W3),送至双向计数器74LS193的加脉冲输入端CU,进行加法计数;此时,下面与非门关闭,其输出为高电平(波形W4)。当光电编码器逆时针旋转时,通道A输出波形比通道B输出波形延迟90°,D触发器输出Q(波形W1)为低电平,Q(波形W2)为高电平,上面与非门关闭,其输出为高电平(波形W3);此时,下面与非门打开,计数脉冲通过(波形W4),送至双向计数器74LS193的减脉冲输入端CD,进行减法计数。(https://www.xing528.com)
汽车方向盘顺时针和逆时针旋转时,其最大旋转角度均为两圈半,选用分辨率为360个脉冲/圈的编码器,其最大输出脉冲数为900个;实际使用的计数电路用3片74LS193组成,在系统上电初始化时,先对其进行复位(CLR信号),再将其初值设为800H,即2048(LD信号)。如此,当方向盘顺时针旋转时,计数电路的输出范围为2048~2948;当方向盘逆时针旋转时,计数电路的输出范围为2048~1148;计数电路的数据输出D0~D11送至数据处理电路。
实际使用时,方向盘频繁地进行顺时针和逆时针转动。由于存在量化误差,工作较长一段时间后,方向盘回中时计数电路输出可能不是2048,而是有几个宇的偏差。为解决这一问题,我们增加了一个方向盘回中检测电路。系统工作后,数据处理电路在模拟器处于非操作状态时,系统检测回中检测电路。若方向盘处于回中状态,而计数电路的数据输出不是2048,可对计数电路进行复位,并重新设置初值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。