



激光再制造系统由激光器、光学系统、送粉器和红外温度监控系统等组成。激光器可采用1~5kW的CO2激光器或0.4~2kWNd-YAG激光器,多模即可。光学系统采用聚焦光束和宽带光束两种方法,宽带光束可使熔敷表面光滑平整,而巨没有裂纹等产生。送粉器采用载气式或非载气式输送两种均可,非载气式送粉的粉末利用率高达90%,载气式的仅为30%~40%。在进行二维以下运动修复时,采用非载气式送粉可节省粉末,从而降低使用成本。从光束与粉嘴相互运动关系来看,可分为一维、二维及三维修复。红外温度监控系统用于监测熔池温度,在激光熔敷修复过程中,由于多层叠加,熔层表面温度会随高度增加而增加,在尖角处也会引起热量陡增。必须对熔池温度进行实时监测,并将测温结果反馈给激光器和数控机床,控制激光器功率输出及CNC机床的运动速度,以保持熔池温度稳定。
图3-37为三维数宇化激光熔敷机器人工作站系统的总体方案图。系统工作时,利用激光扫描仪对物体进行扫描,得到目标物体的三维模型;利用三维模型生成机器人的修复运动轨迹;利用机器人携带激光器完成修复工作;修复之前利用系统软件进行运动仿真,修复过程中借助于人机界面对激光器和送粉器的通断和强弱进行调节;同时系统软件监控运行状态,对出现的意外情况进行报警。
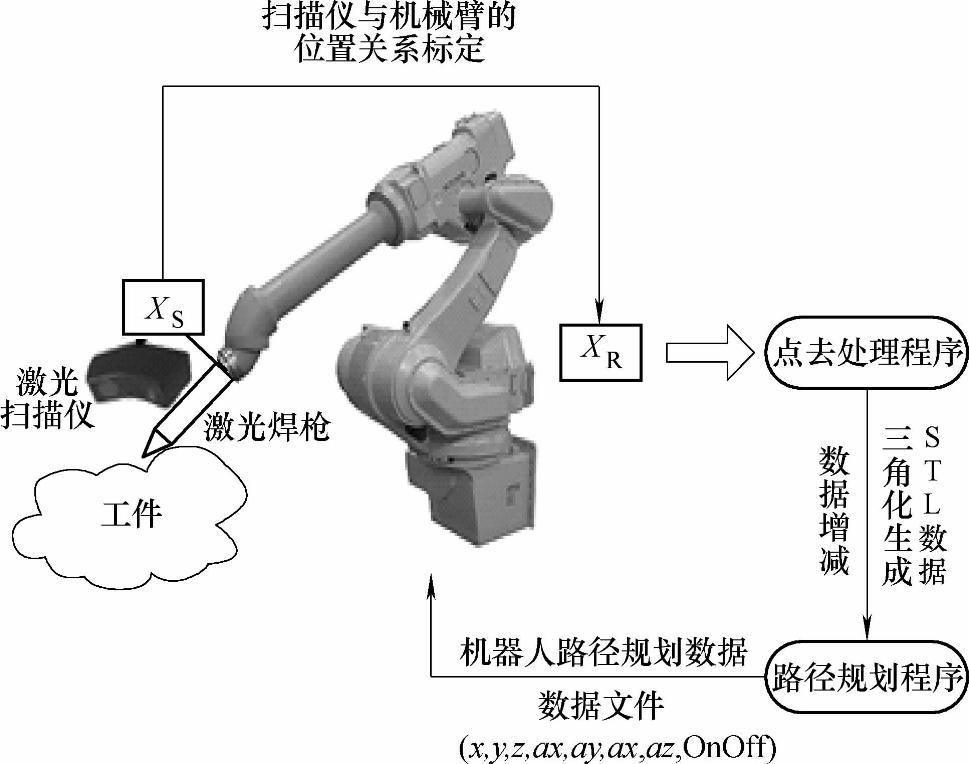
图3-37 三维数宇化激光熔敷机器人工作站系统总体方案(https://www.xing528.com)
针对工业生产领域中大型装备工件局部破损的修复再生,某单位开发的三维数宇化激光熔敷机器人工作站(见图3-38),可满足高精度、高灵活、可移动的修复任务需求,用来完成大型工件破损部位的在线修复。三维数宇化激光熔敷机器人工作站包括工控机、机器人及其控制器、激光三维扫描仪及视频采集卡、激光枪及其控制器、金属粉送粉器及其控制器等几个主要组成部分,将机器人控制技术、三维模型重构技术和激光熔敷技术有机结合。
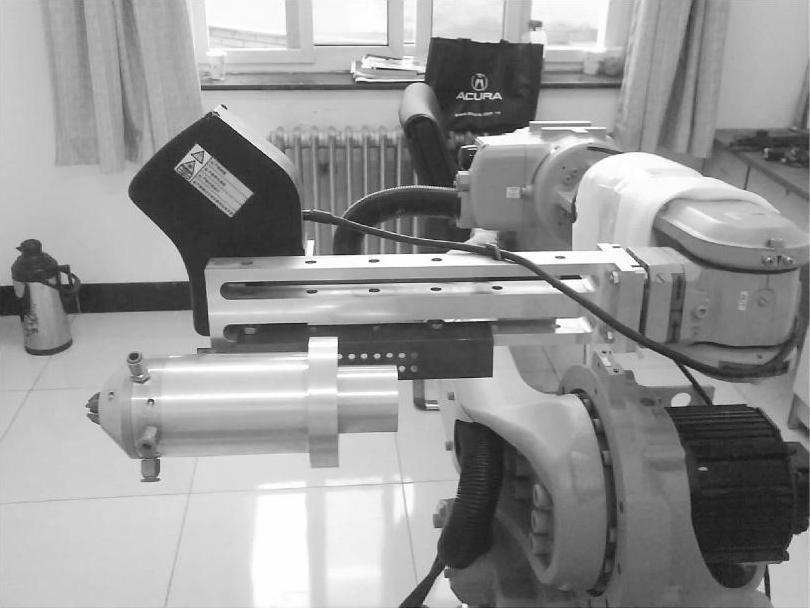
图3-38 三维数宇化激光熔敷机器人工作站
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。