



立体声技术的意义就在于它能够将在某一声学环境中声音随时间变化的情况记录下来,并在立体声重放系统中再现。在这个再现过程中,声音方位无疑是很重要的信息。一般情况下,我们当然追求声音方位的真实再现。可是,由于立体声传声器系统设置的不同,拾取的声音信号成分不同,难免造成声像定位的畸变。了解不同拾音制式拾取的声音信号在立体声重放中的畸变对在特定情况下选择拾音制式是有益的。关于人头立体声耳机立体声重放的声像定位声音畸变问题在2.3节中已提及,不再赘述;而且在人头立体声中,在重放中使用不同拾音制式的录音节目源,声像定位畸变的情况是几乎相同的,讨论的意义不大。在这一节主要讨论房间立体声中,不同的拾音制式拾取的声音信号在扬声器立体声重放中声音信号的畸变。
与单声道录音技术相比,立体声录音技术最大的进步是获得了在水平方向的声音方位信息。这个进步是人们对音响审美要求的提高,也是科学技术在音响领域的革命。所以,录音师们对立体声录音中水平方向的声像定位问题十分关注,也常常被声像定位的畸变困扰。
在扬声器立体声重放系统中,声音在水平方向的声像定位畸变一般包括“声像还原准确度”和“声像定位准确性”两个层面的内容。二者有密切的相关性,并相互影响和制约。但是,也绝不可以将二者混淆。
声像还原准确度指某一点声源(乐队中某一件乐器)在扬声器立体声重放系统中的声像体积再现与该声源在乐队中声音体积原状相比较的吻合程度。显然,最理想的体积再现是还原原来声源体积的大小,这样的还原称为“声像准确”。如果某一点声源的声像在重放中被放大,则称为“声像模糊”。“声像还原准确度”也是“声像定位畸变”的一种表现形式,但是为了区别录音师们对“声像定位”在约定俗成意义上的理解,这里使用“声像还原”,以示区别。
一般情况下,声像在重放中只可能因为模糊而被放大,不可能被缩小。当然,因为重放系统中两个扬声器的间距远远小于声源的宽度(比如舞台演出)而导致整体的、按比例的缩小不在此讨论之列。另外,所谓的“大嘴效应”也不在此讨论之列。“大嘴效应”是由于拾音范围角度设定不当造成的,与使用的拾音制式无关。而这里讨论的“声像还原准确度”是拾音制式本身的特性,一般情况下,由此产生的声像还原畸变是无法克服的。
声像还原准确与否特指原声源在重放系统中“声音造型”的畸变程度;至于声像定位是否准确,即原声源在重放系统中“声音位置”的畸变不在此列(见9.1.2.2)。
声像体积还原是否准确用“声像还原准确度”表示。最准确的声像还原用系数0表示,最不准确(模糊)的声像还原用系数1表示。从系数0到系数1声像还原逐渐模糊。
图9-5中的三条曲线描述了不同拾音方法的声像还原准确度情况,图中纵坐标为声像准确度系数。
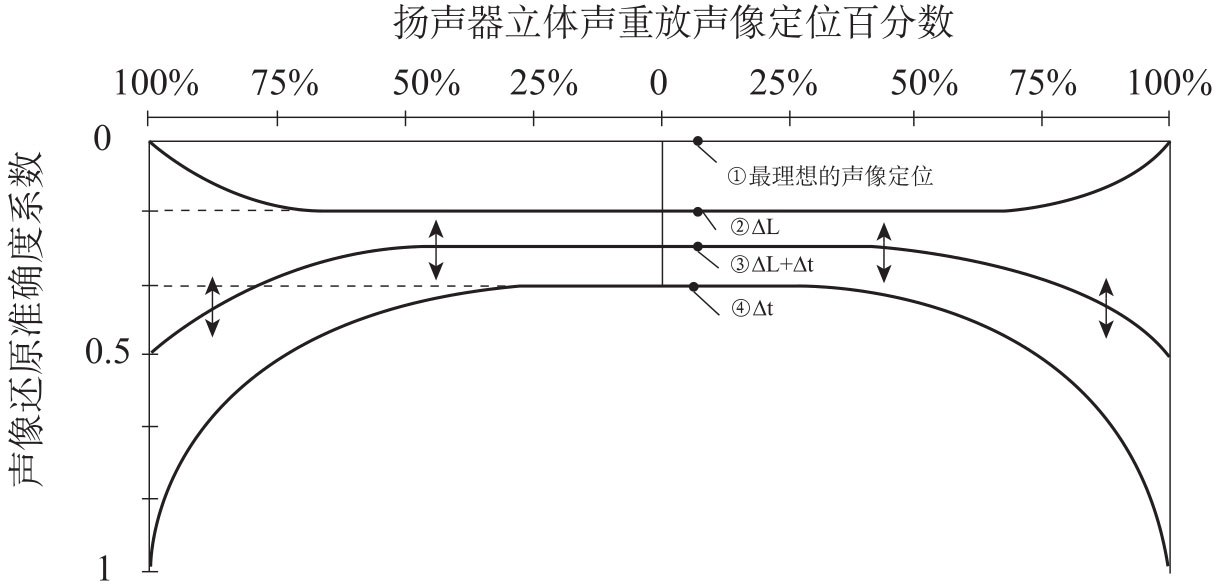
图9-5 不同拾音方法得到的声像定位准确度曲线
①是一条直线,是最理想的声像定位。就目前的立体声技术还无法达到这样理想的状态。
②是强度差拾音方法声像还原准确度曲线。该拾音方法的特点是两侧声像还原十分准确,接近理想值。在声像定位百分数±0→±70%之间声像还原有些模糊,但在这一区域模糊程度比较一致,而且并不严重。
③是混合拾音方法声像定位准确度曲线。总体上,该拾音方法的声像还原比强度差拾音方法的声像还原模糊。该拾音方法的特点是中间声像还原较准确,两侧声像还原从±60~100%相对中间区域逐渐模糊。
④是时间差拾音方法声像定位准确度曲线。相对以上两种拾音方法,时间差拾音方法声像还原最不理想,两侧声像还原准确度更差,且中间声像还原相对准确的区域很小。
图9-6将声像还原处于两个极端的强度差和时间差拾音方法声像还原准确程度作比较。该图描绘了某一个具有一定体积的点声源因在声场中位置不同,而导致在立体声重放中声像还原准确度不同的情形。该图更形象地解释了“声像还原准确程度”的概念。
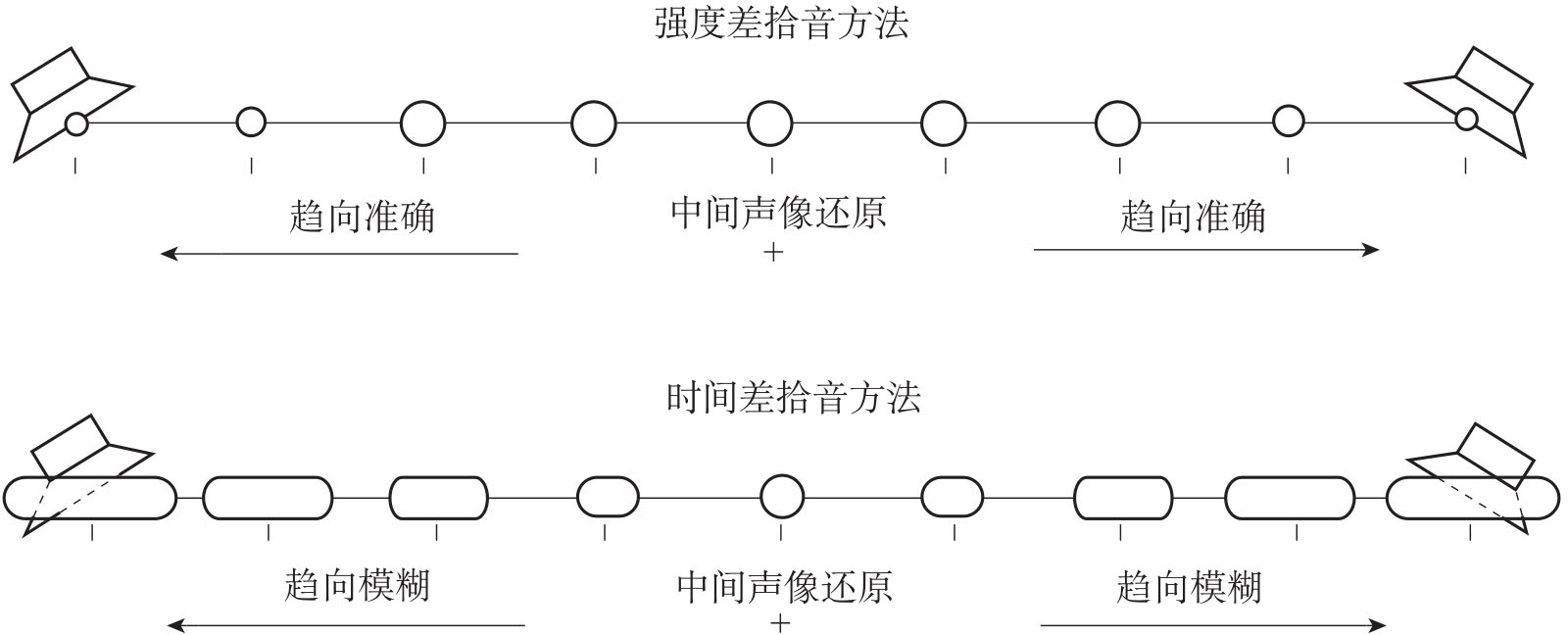
图9-6 强度差和时间差拾音方法声像还原准确性比较示意图
说明一点,本节讨论的“声像(点声源的体积)还原”畸变不仅表现在立体声重放的水平方向,也表现在纵深方向。但是,听音人对这种“畸变”在水平方向的感知比在纵深方向的感知明显得多,所以将这个问题在“水平方向的声像定位畸变”中讨论。
这里的“声像定位准确性” 就是指在本书中一直讨论的,在一般意义上理解的“声像定位”概念。
声像定位准确性是指在立体声重放系统中再现的声像与原声源相比较空间位置的还原程度,即“声音空间位置”的畸变程度。声像位置还原得准确,称为声像定位准确;反之,则称为声像定位不准确。
声像定位准确性揭示了某一个点声源(如一件乐器)的声像位置畸变情形,也揭示了整个乐队整体的声像位置畸变趋势。
声像定位准确性讨论因拾音制式本身特性而导致的声像位置畸变,这种畸变是相对稳定的、固定的。可以说,选定了某种立体声拾音系统的传声器设置,就决定了必须接受相应声像位置畸变的结果,它是不以录音师的主观愿望为转移的客观事实。(https://www.xing528.com)
在这个意义上,所谓的声像漂移现象不在此讨论之列。声像漂移现象似乎与声像定位畸变相似,但前者指某一点声源在立体声重放中的声像定位飘忽不定,所以称其为“漂移”。另外,声像漂移现象的产生与拾音制式并没有必然的联系,它产生的机理也比较复杂。
声像定位准确与否在声像定位畸变中是很好理解的问题,也是录音师们十分关注的问题。图9-7中介绍了一些常用的拾音制式因传声器设置不同导致的声像定位畸变的情况。图9-7列举了三种拾音方法,即强度差拾音方法、“混合”拾音方法和时间差拾音方法的13种不同传声器设置,以此直观地描述了某一点声源声像位置畸变情形,也使整个乐队整体的声像位置畸变趋势一目了然。
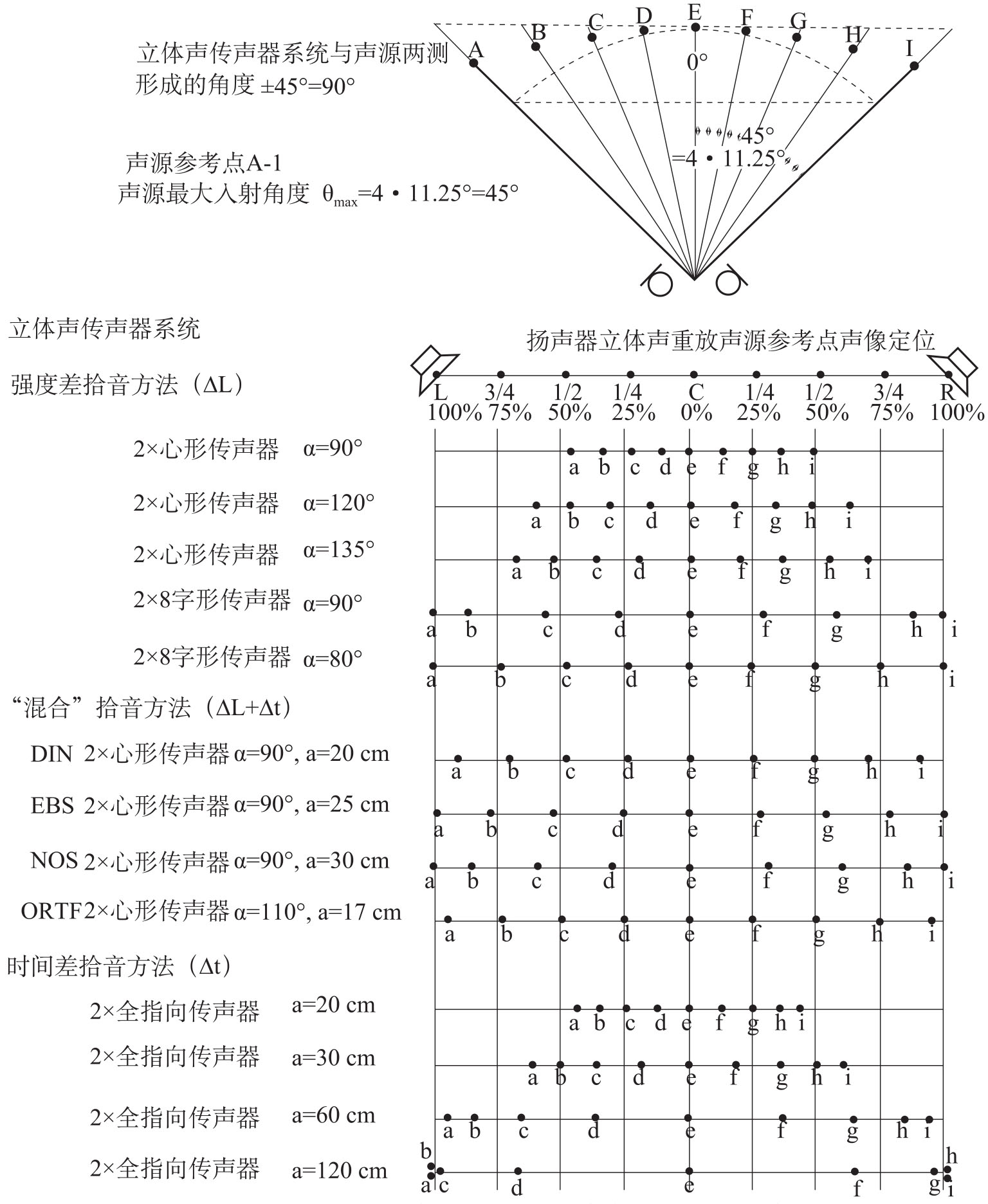
图9-7 常用拾音制式的传声器设置导致的声像定位准确性比较示意图
对照分析图9-5和图9-4可以进一步理解声像还原准确度和声像定位准确性的区别。二者从两个不同侧面揭示了在扬声器立体声重放系统中声音在水平方向的声像定位畸变。可以这样理解:声像还原准确度是在“点”上的声像畸变,其表现形式是声像体积的“膨胀”;声像定位准确性是在“面”上、在空间上的声像畸变,其表现形式是声像位置的“迁移”。二者之间具有一定的相关性,也有条件的相互作用,但是,切不可以将二者混为一谈。
图9-7似乎表明:强度差拾音方法具有声像向中间“靠拢”的趋势,且两个传声器形成的主轴张开角度α越小越明显;时间差拾音方法具有声像向两侧“分离”,即所谓的“中间空洞现象”的趋势,且两个传声器形成的传声器间距a越大越明显;而“混合”拾音方法这两个方面的声像畸变都不明显,且各个拾音制式的差别也不大。
必须承认,上述情况在某种程度上揭示了不同拾音方法的声像定位畸变规律。但是,如果以此得出哪种拾音方法(或者拾音制式)声像定位更准确的结论则是错误的。因为,在图9-7中,声源宽度是固定不变的,立体声传声器系统距声源的距离是不变的,乐队扩展范围也固定不变。在立体声传声器系统的拾音范围角度并没有根据外侧距传声器系统的角度进行相应的调整前提下评价声像定位准确性的优劣显然是不公正的。如果根据拾音范围理论调整立体声传声器系统的传声器设置以使拾音范围角度θmax与乐队宽度重合,图9-4中的声像定位则大不一样。从这一点的讨论中,可以进一步理解“拾音范围”理论的意义和在立体声录音中的重要性。
与单声道录音相比,双声道立体声录音在纵深方向的声像定位改善不大。二者在纵深方向的声像定位都比较好,也就是常说的“层次感”好。在双声道立体声中,纵深方向的声像定位准确与否并不重要,即使希望得到在纵深方向的准确声像定位,只要调整立体声传声器系统与被录音声源的距离(在不顾及直达声/混响声比例的情况下)就会得到满意的纵深声像定位。在这个意义上,笔者认为:研究“真正”纵深方向声像定位畸变的意义不大。
但是,因为双声道立体声有较强的水平方向声像定位能力,那么,在纵深方向的每一个层面,每一个梯度上的水平方向声像定位问题就必须考虑,并应该研究它们的变化规律。在9.3.1中,我们详细地讨论了声音在水平方向声像定位的畸变,本节拟讨论的“纵深方向的声像定位畸变”问题在一定意义上也是水平方向声像定位问题,其准确的定义是声源在纵深方向的不同层面、不同梯度上相对的水平方向声像定位的畸变。这一点有必要说明,让读者清楚。
理想的声音在纵深方向的声像定位应该是这样的:假如一听音人位于音乐厅最好的位置(一般情况下,在观众席6-10排的正中间)聆听音乐,位于听音人前方中轴线任意纵深的点声源的声音在扬声器立体声重放系统中都应该声像定位在两扬声器连线的中点C上,即声像定位0%,这一点,使用任何拾音制式都可以做到。
那么,偏离听音人中轴线某一角度任意纵深的点声源的声音在扬声器立体声重放系统中也都应该声像定位在一固定的声像定位百分数上,且随着声源偏离听音人中轴线角度的增加,在该角度任意纵深的点声源的声音都应该得到相同的声像定位百分数的增加。在任意角度上,即在某一声像定位百分数上,随着纵深距离的增加,声像定位百分数应该不改变,以保证在重放中的准确声像定位。如果在任意角度上,随着纵深距离的增加,声像定位百分数改变,即出现声音在纵深方向的声像定位畸变。
分析图9-8(见P124),我们可以得出结论:
1.强度差拾音方法纵深方向的声像定位准确。因为强度差拾音方法根据声道间的强度差∆L决定声像定位。∆L仅随声源入射角度的改变而改变,与纵深距离无关。图9-8①中使用的是8字形传声器,所以在90度轴的下方得到相同的“镜像”声像。
2.“混合”拾音方法纵深方向的声像定位发生了畸变,原因是“混合”拾音方法中部分声道间时间差信号,但纵深方向的声像定位畸变并不严重。图9-8②中使用的是背面灵敏度较低的心形传声器,所以在90度轴的下方因声道间∆L不充分(远小于18dB),导致声像定位很窄,且总电平很低,一般情况下,这个信号(混响声除外)无法使用。
3.时间差拾音方法纵深方向的声像定位畸变比较严重。其原因是由时间差拾音方法中的“放大镜效应”(参照4.1.5一节)引起的。图9-5③中使用的是全方向传声器,所以在90度轴的下方得到相同的声像,但不是“镜像”声像,即立体声传声器系统的0度轴左侧拾取的声音信号定位在左扬声器上,反之,则定位在右扬声器上。
在9.3节中我们讨论了“不同拾音制式扬声器立体声重放声音信号的畸变” 问题。“声音信号的畸变”远比上述讨论要复杂得多。例如,某点声源由于“声像还原准确度”不好,势必影响“声像定位准确性”,其结果是“水平方向的声像定位畸变”,由于这个畸变的原始特征是声源声像变得模糊,声源的体积被“放大”,必然导致该声源的声像“后退”,又造成声音“纵深方向的声像定位畸变”(注意:人们已经十分习惯在视觉世界中物体“近大远小”的透视规律。但是,在声音世界中,声像的“透视”规律为“近小远大”)。因此我们可以得出结论:声音信号在立体声重放系统中的“声像畸变”各种表象是一个问题的诸多方面,无法将它们清楚界定,在考虑“声像定位畸变”问题时更不应该将诸多方面割裂开来。
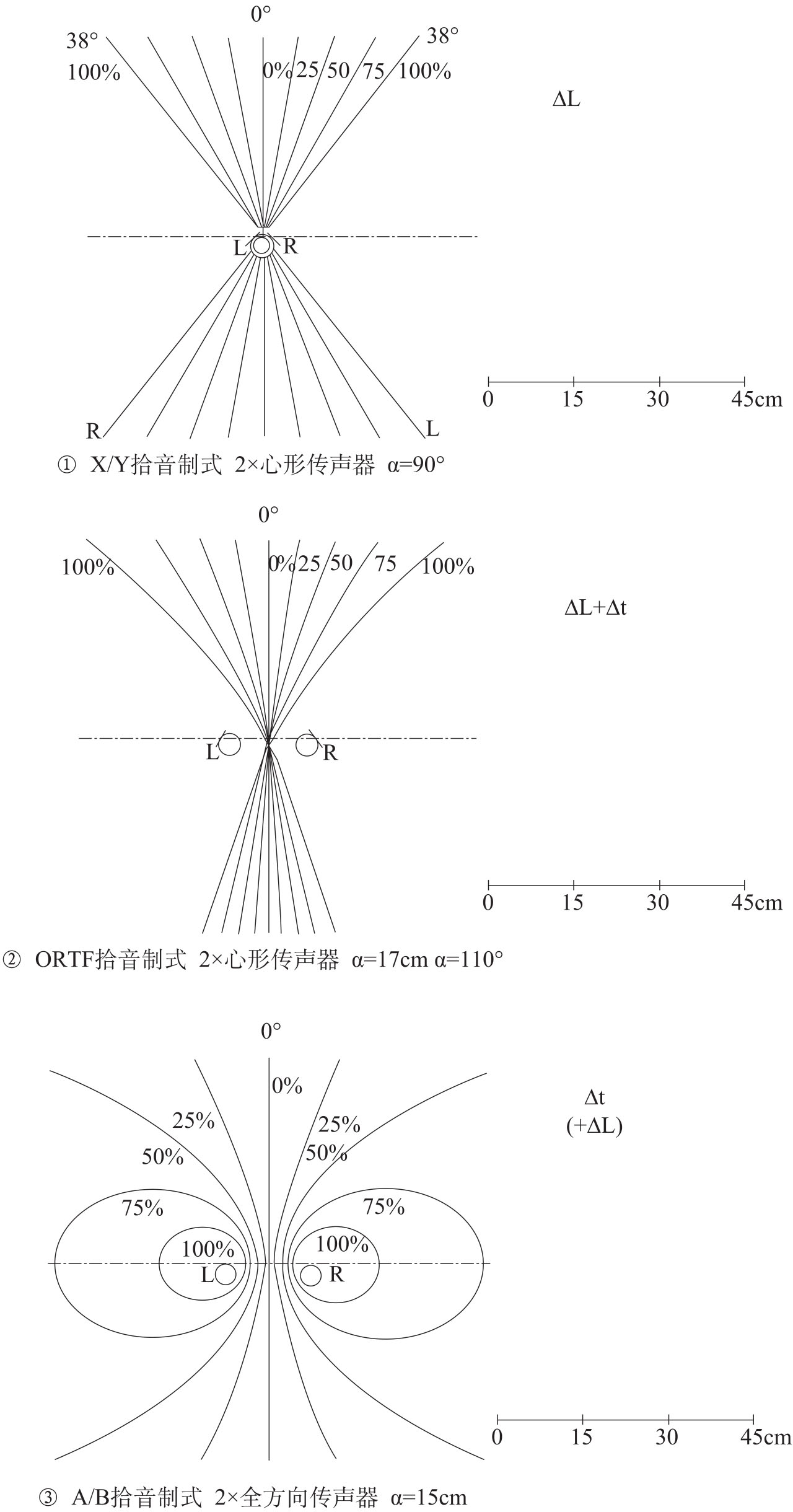
图9-8 三种拾音方法的纵深方向的声像定位畸变比较示意图
①强度差拾音方法的X/Y拾音制式:2×8字形传声器,α= 90°。
②“混合”拾音方法中的ORTF拾音制式2×心形传声器,a=17cm,α= 110°。
③时间差拾音方法中的A/B拾音制式:2×全方向传声器,a=15cm。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。