



为进一步改善系统的动态性能,采用5.4节设计的比例因子自调整二维模糊控制器取替图8-2所示的以8098单片机为核心运行在电压PWM方式下的0.75kW SR电动机DDC系统中PI调节器。
将5.4.1节设计的模糊控制决策表(见表5-3)存放在EPROM内。速度环程序中,将实测的速度偏差e(给定速度-实际转速)、偏差变化 分别乘上量化因子αE、αEC转换成模糊论域中的元素,然后查表5-3得对应的控制输出U,再据式(5-76)得控制占空比的参数HTIME(kT)。
分别乘上量化因子αE、αEC转换成模糊论域中的元素,然后查表5-3得对应的控制输出U,再据式(5-76)得控制占空比的参数HTIME(kT)。
查表5-3的方法较简单,将偏差变化 模糊量转换成表格的列序号i,偏差e模糊量转换成行号j,则可确定输出控制量在表中的相应位置为:i+15j,再加上表格的首地址,用8098数据传送指令即可实现模糊控制算法,其流程如图8-8所示。
模糊量转换成表格的列序号i,偏差e模糊量转换成行号j,则可确定输出控制量在表中的相应位置为:i+15j,再加上表格的首地址,用8098数据传送指令即可实现模糊控制算法,其流程如图8-8所示。
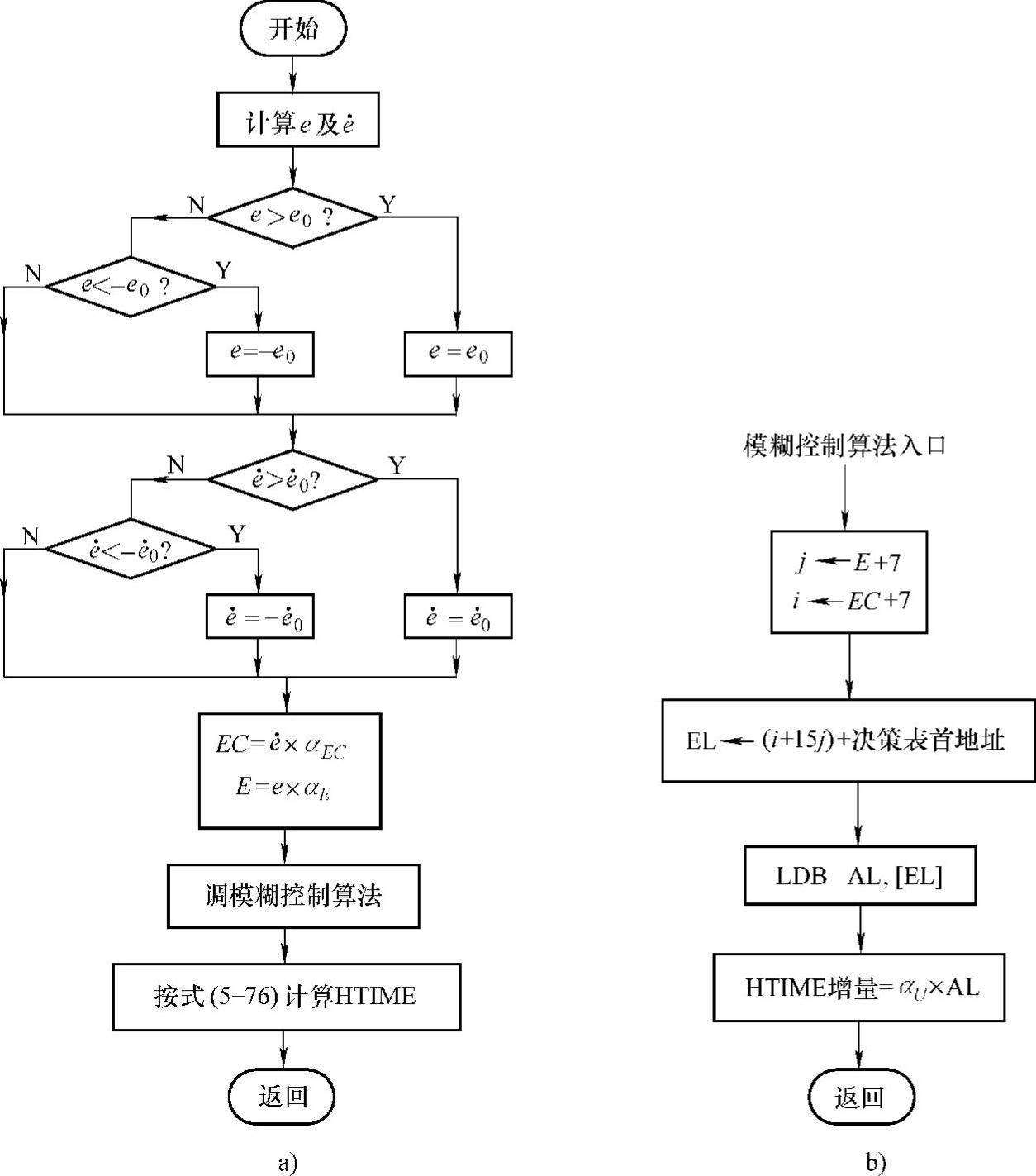
图8-8 基于模糊控制的速度环流程图
a)速度环流程 b)模糊控制算法流程(固定参数)
从图8-8a可以看出,速度环首先计算实际的e及 ,然后判断其是否在约束区间[-e0,e0]及
,然后判断其是否在约束区间[-e0,e0]及 内,若越出约束区间,则令其为相应的区间边界值。这是必要的,因为系统运行实验表明,若按实际可能出现的e及
内,若越出约束区间,则令其为相应的区间边界值。这是必要的,因为系统运行实验表明,若按实际可能出现的e及 最大变化范围[-e1,e1]及
最大变化范围[-e1,e1]及 确定量化因子[αE=14/(2e1),αEC=14/
确定量化因子[αE=14/(2e1),αEC=14/ ],因量化因子小,在接近暂稳态时,分辨率差,系统性能不佳。因此,在参数固定的模糊控制系统程序设计中,应以一合适的小于实际变化范围的区间[-e0,e0]及
],因量化因子小,在接近暂稳态时,分辨率差,系统性能不佳。因此,在参数固定的模糊控制系统程序设计中,应以一合适的小于实际变化范围的区间[-e0,e0]及 来确定量化因子,即αE=14/(2e0),
来确定量化因子,即αE=14/(2e0), ,这样,为了使与实际的e及
,这样,为了使与实际的e及 对应的模糊量不超出论域的范围,需对实际的e及
对应的模糊量不超出论域的范围,需对实际的e及 用约束条件加以判断、限幅。(https://www.xing528.com)
用约束条件加以判断、限幅。(https://www.xing528.com)
从图8-8b所示可见,模糊控制算法是通过查表的方法实现的。
如5.4.2节所述,为了改善模糊控制器的性能且兼顾实时性,将偏差量化因子离线整定为αE=0.0175,e的约束区间取[-400,+400];偏差变化量化因子离线整定为αEC=0.035, 的约束区间取[-200,+200];在线查询表5-4,获得自调整的比例因子αU。
的约束区间取[-200,+200];在线查询表5-4,获得自调整的比例因子αU。
比例因子自调整模糊控制算法流程如图8-9所示,图中,字节寄存器AH存放查询到的比例因子αU,字节寄存器AL存放查询到的控制量。
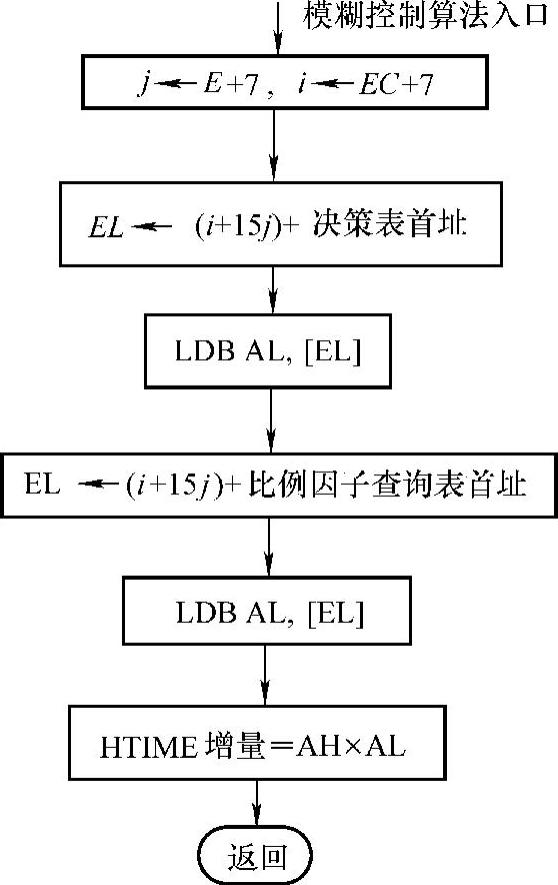
图8-9 比例因子自调整模糊控制算法流程
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。