



图8-7所示给出速度环程序框图。如前所述,起动阶段速度环每隔120ms被调用一次;起动后若运行在基速以下,每隔30ms被调用一次,若运行在基速以上,每隔12ms被调用一次。
速度环首先计算实际转速,然后判断电动机是否已经起动。将电动机转速低于50r/min作为起动阶段,这时旋转电动势小,斩波占空比不能一次加大。为加快起动过程,起动阶段速度偏差不作PI调节运算,而是采取软件定时器T1中断服务程序中逐步加大斩波占空比的方法实现软起动功能。
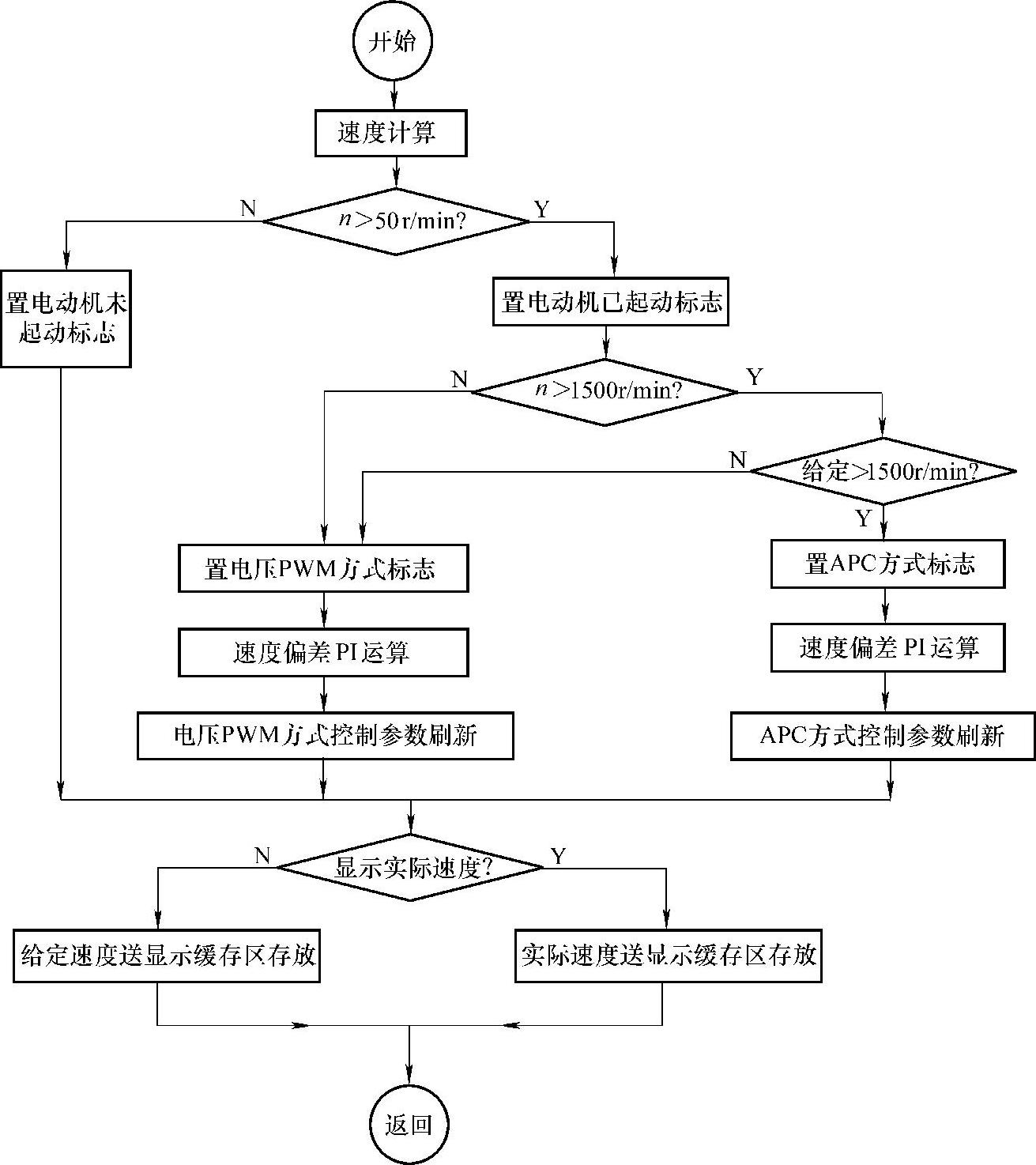
图8-7 速度环程序框图
电动机起动后,速度环每调用一次,都要进行一次速度偏差PI运算,然后刷新控制参数。由于电压PWM方式运行下的SRD和APC方式运行下的SRD结构不同,因此两种方式下的PI调节器参数亦不同,应分别整定。两种控制方式的平稳切换非常重要,但不易实现,因此需要合理设计并反复调试程序。当给定速度在基速以下但接近基速时,实际速度可能会因超调超出基速,这时若切换为APC方式,就会导致系统振荡。为此,当实际转速超出基速时,还要判断给定速度是否大于基速,若否,则不切换为APC方式。
电压PWM方式采取定频调宽方式。如图5-12所示,斩波周期TW是固定的,则占空比为

一般来说,斩波周期TW受电动机工作平稳性和GTR开关特性限制。TW越小,电流脉动越小,有利于提高系统的动态性能。但过小的TW对动态性能进一步的改善作用并不显著,但会增加系统输出处理时间,增加GTR的开关损耗;另外,对采用软件定时器T1、T2中断生成PWM信号而言,过小的TW难以保证程序正确运行,综合考虑并经系统运行调试,TW确定为1.6ms。这样,电压PWM方式下控制参数可按下式刷新:(https://www.xing528.com)
HTIMEk=HTIMEk-1+ΔUk (8-6)
式中,下标k表示与第k次速度环处理周期对应的控制参数,ΔUk(=Uk-Uk-1)为增量型PI控制算式在第k次处理周期的输出。
APC方式下的可控参数为起始开通角θon和关断角θoff。如前所述,为简化控制,采取θoff固定,调节θon的方法。若θoff过小,相电流过早为零,出力小;若θoff过大,续流大,持续时间长,易产生较大的制动转矩,加剧定子振动,所以θoff必有一最佳的角度,实验表明,20°~26°是θoff的优选范围,经调试,θoff的设计值确定为22°。
如图8-6所示,APC方式是在HSI中断服务程序中通过给HSO-TIME寄存器装载θon、θoff所对应的时间值ton、toff实现的。在速度环中,起始开通角对应的ton按下式刷新:

因每转过一步进角,HSI均要产生一次中断,因此,通过相邻两次HSI触发时间间隔Δt可求得θoff=22°所对应的时间为:toff=Δt×22/15。
速度环中偏差的PI算法是影响系统动、静态性能指标的关键,将在8.4.5节中论述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。