



根据上述所求系统参数,可确定式(6-2)调节对象的传递函数。

则调节对象的传递函数为

由式(5-32)、式(5-33),按三阶设计的速度调节器为

式中,τ1=4T∑;
将已知数据代入,得τ1=11.64ms,Ti=4.47ms,则调节器传递函数为

因KP较大、τ1较小,若按图5-5所示基本PI调节器电路结构确定元件参数,积分电容C必选得很小,易受干扰,导致不稳定。为此,初步确定采用图6-7所示的PI调节器,其传递函数为

且有
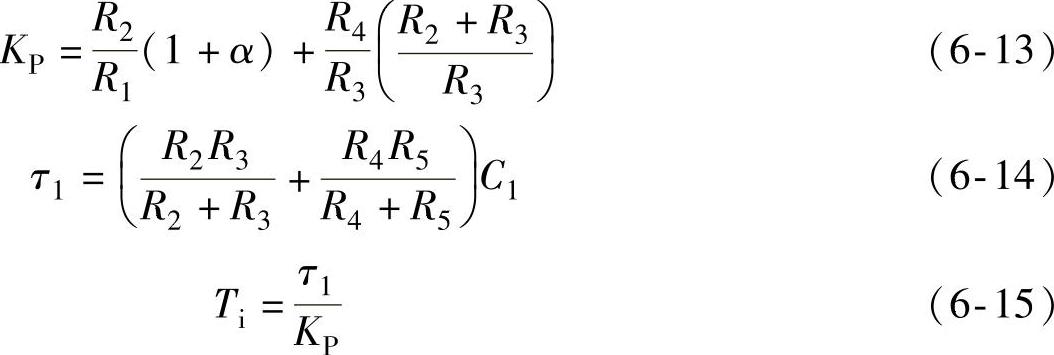
式中,α=R4/R5,取决于电位器位置。因此,图6-7调节器除了适合于KP较大、τ1较小的情况外,而且其α可调,便于对象变化时进行现场整定,这种结构的调节器对按三阶设计的SRD是较合适的。设计时,可令α=1,且当R2>>R3和R2>>(R4+R5)时,式(6-13)、式(6-14)分别简化成以下两式:
 (https://www.xing528.com)
(https://www.xing528.com)

图6-7 初步确定的PI调节器
若R1取20kΩ,现KP=2.6、α=1,则由式(6-16)得R2=26kΩ,则由式(6-17)可求得
τ1=R2R3C1/(R2+R3)=11.64ms
取C1=2μF,解得R3≈7.5kΩ。R4、R5之和即为放大倍数调节电位器值,可取用4.7kΩ电位器,其可满足R2>>(R4+R5)。
由于调节对象为两个惯性环节TM、T∑,按三阶设计,为减少超调,需加速度给定滤波器,其时间常数Tg的计算与TM/T∑比值有关[200]。当TM/T∑>>30时,Tg=4T∑;若TM/T∑<30则Tg=qT∑,其中q≤4。今TM/T∑≈21,可取q=3,故,Tg=qT∑=8.73ms。
如图6-8所示,若以R1/2和R1/2串联,中间接Cg,则给定时间常数为
则 Cg=4Tg/R1=1.75μF
Cg取为2μF。
上述初步设计出的调节器需在系统实验运行中结合稳、快、准的要求进行参数整定。调整时,应先将系统安排得具有较大稳定裕量,即将调节器的反馈电位器调整到α=1,积分电容C1可先短路,然后再加入电容C1,并将α调至合适的大小。图6-8所示为整定后的速度调节器。图中,VD为调节器输出限幅钳位二极管;而并联在反馈支路上的场效应晶体VF是为防止带有积分作用的调节器,在零输入条件下,出现漂移输出引起电动机“爬行”而设置的,其工作原理是:在停车状态下,栅极G加正信号而使VF导通,封锁调节器输出为零,在工作状态下,栅极G取负信号,VF被关断,使调节器投入工作。
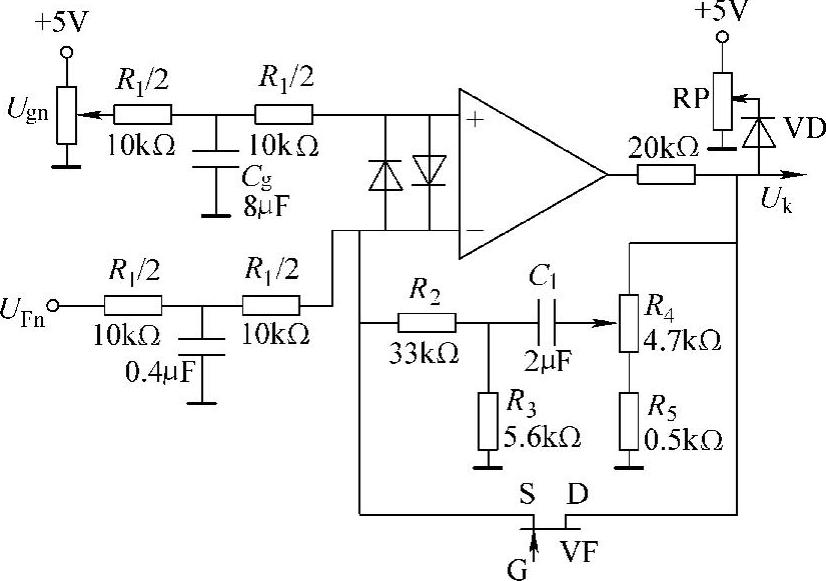
图6-8 整定后的速度调节器
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。