



位置逻辑控制电路的主要功能是根据输入的转子位置状态信息,输出控制对应相导通或关断的信号。
SR电动机产生电磁转矩的条件是通电一相绕组的电感随转角而变的变化率必须为正。样机采用图4-1所示的光敏式转子位置传感器检测转子位置,从图4-2转子位置信号及对应相电感变化的曲线中可见,在每一转子步进角内,都有两相的电感处在上升区域,因此,SR电动机的通电方式有如下两种:
(1)任一瞬时,只有一相通电,每相通电1/4转子角周期 以逆时针转动为例,对应转子位置状态信号SP从01→11→10→00→01,各相绕组通电的次序为A→B→C→D→A或为D→A→B→C→D,这与步进电动机的单四拍运行相似。
(2)任一瞬时,有两相同时通电,每相通电1/2转子角周期 仍以逆时针转动为例,对应转子位置状态信号SP从01→11→10→00→01,各相通电次序为:DA→AB→BC→CD→DA,这与步进电动机的双四拍运行相似。
由于系统功率变换器采用图3-3b所示的双极性直流电源功率变换器主电路,两个±Us/2的电压由电容分压形成,若上、下电路工作情况不对称,±Us/2便会有很大的波动,这在低速运行时,尤为严重。
为此采用双四拍运行方式,保证电路上、下两部分同时有一相绕组导通,以避免电压的波动和转子在平衡位置附近产生振荡。应该指出,双四拍运行方式下的相电流可能会在电感下降区域内续流,形成制动转矩,而且两相绕组同时通电,磁路饱和加剧,进一步降低了电流产生转矩的有效性,导致系统效率降低。(https://www.xing528.com)
图6-2所示为实现上述双四拍运行的逻辑控制电路。两路转子位置状态信号S、P经74LS138译码器输出与转子位置一一对应的状态信号,再经与非门电路(74LS00)提供对应两相的触发信号,另两相则提供关断信号。表6-1为图6-2的真值表。
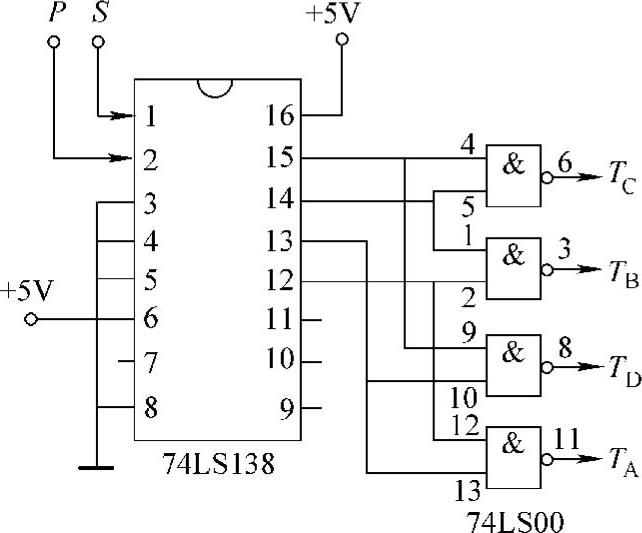
图6-2 位置逻辑电路(逆时针转动)
表6-1 真值表

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。