



类似于式(5-23)的推导过程,在不同运行条件下,SRD速度调节器的调节对象传递函数皆可近似等效为下式所示的形式,即为时间常数不同的两个惯性环节:

式中,TM>Te。
本节主要讨论SRD速度调节器的工程设计方法。
5.2.2.1 “二阶最佳”工程设计方法
按“二阶最佳”工程设计方法,对式(5-26)所描述的调节对象,调节器应采用PI调节器,即

使(τ1s+1)与调节对象的大惯性环节对消,即
τ1=TM (5-28)
并选择Ti满足
Ti=2KOTe (5-29)
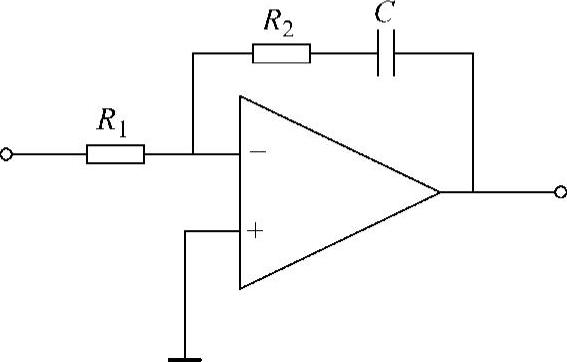
图5-5 PI调节器电路
“二阶最佳”设计中的PI调节器可用式(5-27)~式(5-29)作为依据,按图5-5设计具体的PI调节器电路。
图5-5中元件参数按下式选择:(https://www.xing528.com)

5.2.2.2 “三阶最佳”工程设计方法
SRD一般并不满足TM≥30Te的条件,但实践证明,当TM>Te时,一般仍可将TM惯性环节近似视为积分环节来计算“三阶最佳”设计的调节器,即对式(5-26)的被控对象采用式(5-31)所示的PI调节器,即

式中,τ1=4Te (5-32)
Ti=8KOTe2/TM (5-33)
“三阶最佳”设计中的PI调节器可用式(5-31)~式(5-33)作为依据,按图5-5设计具体的PI调节器电路。
5.2.2.3 调节器设计小结
对SRD,无论是按“二阶最佳”工程设计方法设计,还是按“三阶最佳”工程设计方法设计,都采用PI调节器,其结构相同,只是调节器参数的设计方法不同。
众所周知,二阶设计超调量小,系统稳定性好,在阶跃输入时的静差为零,斜坡输入时的静差为常数,系“Ⅰ”型系统;三阶设计的优点是当无给定滤波器时,阶跃输入静差及斜坡输入静差皆为零,属于“Ⅱ”型系统,但没有给定滤波器的三阶设计超调量一般达43%,稳定性较差。加了给定滤波器虽可减小超调量,但在斜坡输入时存在静差,而且过渡过程时间较长。
作者认为:SRD速度环调节器设计以选“三阶最佳”工程设计方法为宜,理由如下:
首先,在SRD中,TM>4Te的条件是满足的,而这时三阶克服阶跃扰动所需的恢复时间就远小于二阶;其次,同样的PI调节器,二阶的时间常数τ(=TM)和SR电动机的机电时间常数有关,这不但要临时进行测量、计算,而且不易准确测量、计算。而三阶的τ(=4Te)和小惯性群等效时间之和有关,这些参数是由SRD的功率变换器、斩波放大器、速度反馈环节等决定的,一般较易计算或预先实测出,不必在现场调试时进行测量,虽说调节对象放大倍数和大时间常数TM初始设计时同样难以准确预知,但其影响的只是PI调节器比例增益的确定,可以先粗略估算,然后现场仅需调整PI调节器的比例增益即可权衡系统稳、快、准的要求。
以上所讨论的基于“二阶最佳”和“三阶最佳”设计方法的调节器设计是针对式(5-26)的调节对象而言的。实际的SRD要较式(5-26)复杂得多。
首先,式(5-26)是从SRD小信号动态模型作若干近似处理后得到的;其次,SRD小信号模型本身亦是近似的,只有在“小信号”下才有足够的近似精度,因此实际SRD的调节器在PI调节的基础上通常还需要加上微分(D)调节器,即构成PID调节器,由二阶、三阶设计方法所得到的调节器参数往往需要在现场调试中加以修正。事实上,SRD之所以一般选PID调节器,正是因为SRD准确的动态模型难以建立,而PID调节器的优点在于即使在被控对象模型未知的情况下,其比例、积分、微分常数亦可通过系统的实际运行进行现场整定。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。