



有位置传感器的SRD中,电动机每转一圈,位置传感器均发出一定数量的位置脉冲信号,无论采用全数检测还是采用半数检测方案,将若干位置传感器的输出信号经组合逻辑电路,可得到一步进角脉冲。与传统电动机采用光电式旋转编码器和微机组成数字测速装置相类似,亦有三种常用的方法,分述如下。
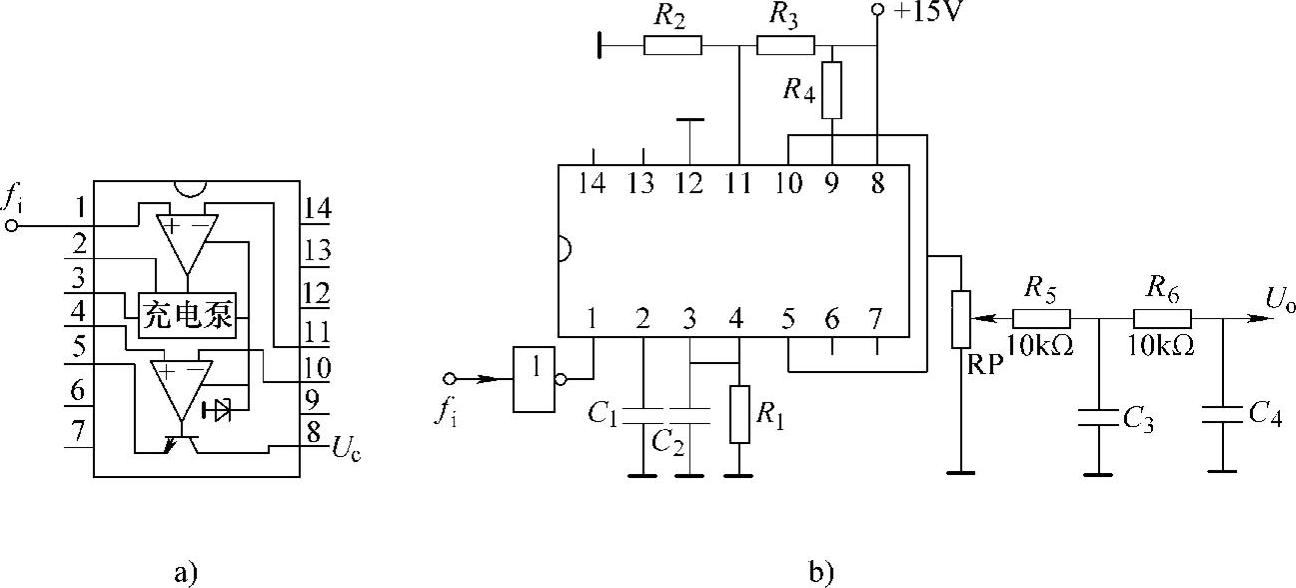
图4-23 F/V集成电路测速
a)CS2917引脚排列 b)CS2917测速电路
4.4.2.1 M法测速
M法测速采用在相等的时间间隔Tc内测取步进角脉冲个数M1来计算出转速。
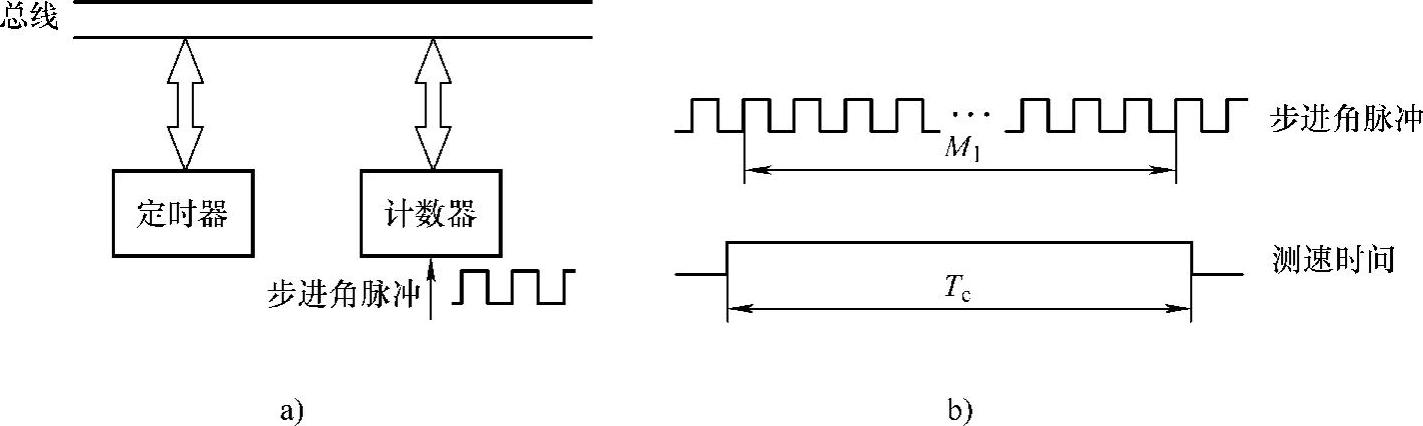
图4-24 M法测速
a)原理图 b)时序图
图4-24所示为M法测速的原理图。步进角脉冲信号由计数器计数,定时器每隔时间Tc向CPU发出一次中断请求,CPU响应中断后,从计数器读出计数值M1,并将计数器清零。由M1和Tc即可求出步进角脉冲信号的频率f1,即

因为SR电动机每转一圈共产生pn个步进角脉冲,则每转一圈需要的时间为

则SR电动机在Tc时间内的平均转速为
式中,pn为每转的步进角脉冲数,pn=mNr(其中,m为SR电动机的相数;Nr为转子的极数)。

M法适用于SR电动机高速运行下的转速测量,低速时测速准确度较低。另外,式(4-31)表明,M法测速的分辨能力与pn、Tc成正比。但为了保证系统的动态性能和控制的实时性,Tc取值不可过大,而SR电动机每转的步进角脉冲数亦有限,因此实际应用M法测速时,通常需要将步进角脉冲信号经倍频电路倍频后再由计数器计数,以提高测速的分辨能力,这时式(4-31)中的pn为倍频系数与每转步进角脉冲数的乘积。
4.4.2.2 T法测速
T法测速通过测量相邻两个步进角脉冲信号之间的间隔时间来计算转速的一种测速方法,而时间的测量是借助计数器对已知频率的高频时钟脉冲计数实现的。(https://www.xing528.com)
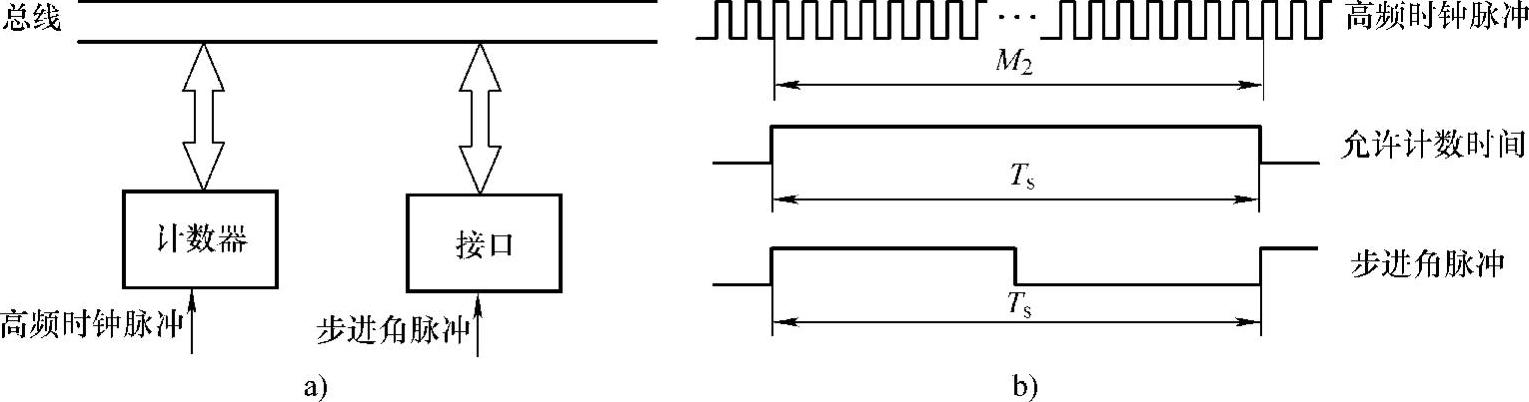
图4-25 T法测速
a)原理图 b)时序图
图4-25所示为T法测速原理图。每输出一步进脉冲,均通过微机接口向CPU发出一次中断请求,CPU响应中断后,从计数器读出高频脉冲计数值M2并清零,由M2值和高频时钟脉冲的频率f0,可得步进角脉冲信号的周期Ts为
Ts=M2/f0 (4-32)则每转一圈需要的时间为

因此SR电动机在一步进角内的平均转速(r/min)为

对比式(4-34)和式(4-31)可见,T法测速与M法测速刚好相反,转速越高,测量计数值M2越小,量化误差越大,因此T法适用于SR电动机低速运行下测速,在低速时,T法测速的分辨能力较强。实际应用T法测速时,有时需要将步进角脉冲信号经分频电路分频后再送至CPU接口,以提高测速准确度。
4.4.2.3 M/T法测速
M/T法既检测时间间隔Tc内步进角脉冲的个数M1,又检测Tc内高频时钟脉冲的个数M2,若高频时钟脉冲的频率为f0,则准确检测时间为

则在时间Tt内,SR电动机的转角为θt(rad),且有

由式(4-35)、式(4-36),得SR电动机转速(r/min)为

M/T法兼有M法和T法测速的优点,高速时相当于M法测速,分辨能力较高;最低速时,M1=1,即成为T法测速,分辨能力同样较高。因此,M/T法是一种满足具有宽范围调速能力的SRD数字测速所需的较佳方法。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。