



光敏式转子位置传感器一般由透射式光电传感器(光电开关)和遮光盘组成。其中,遮光盘有与转子凸极、凹槽数相等的齿、槽,且齿、槽的弧度相等,在圆周均匀分布。遮光盘固定在转子轴上,光电传感器则固定在定子机壳上。
位置检测方案分为全数检测方案和半数检测方案两种。全数检测所用光电传感器的个数为SR电动机的相数m;半数检测方案所用光电传感器的个数为相数的一半,其对奇数相SR电动机不适用。无论采用哪一种检测方案,相邻光电传感器之间的夹角θg皆由下式决定:

式中,m为SR电动机的相数;τr为转子角周期;θstep为步距角。
以四相(8/6)SR电动机(m=4,θstep=15°,τr=60°)半数检测方案为例,如图4-1b所示,遮光盘的齿、槽数与转子的凸极、凹槽数一样,均为6,且均布,所占角度均为30°,遮光盘安装在转子轴上并同步旋转,夹角为75°的两只光电传感器S、P固定在定子上。当遮光盘的凸齿转到开槽的S、P位置时,其红外发射管的光被遮住而使其光敏晶体管截止,输出状态为0;而当遮光盘的槽转至S、P位置时,其红外发射管的光没有被遮住,光敏晶体管导通,输出状态为1,则在一个转子角周期(60°)内,S、P产生两个相位差为15°、占空比为50%的方波信号,其组合成四种不同的状态,分别对应四相绕组不同的参考位置。
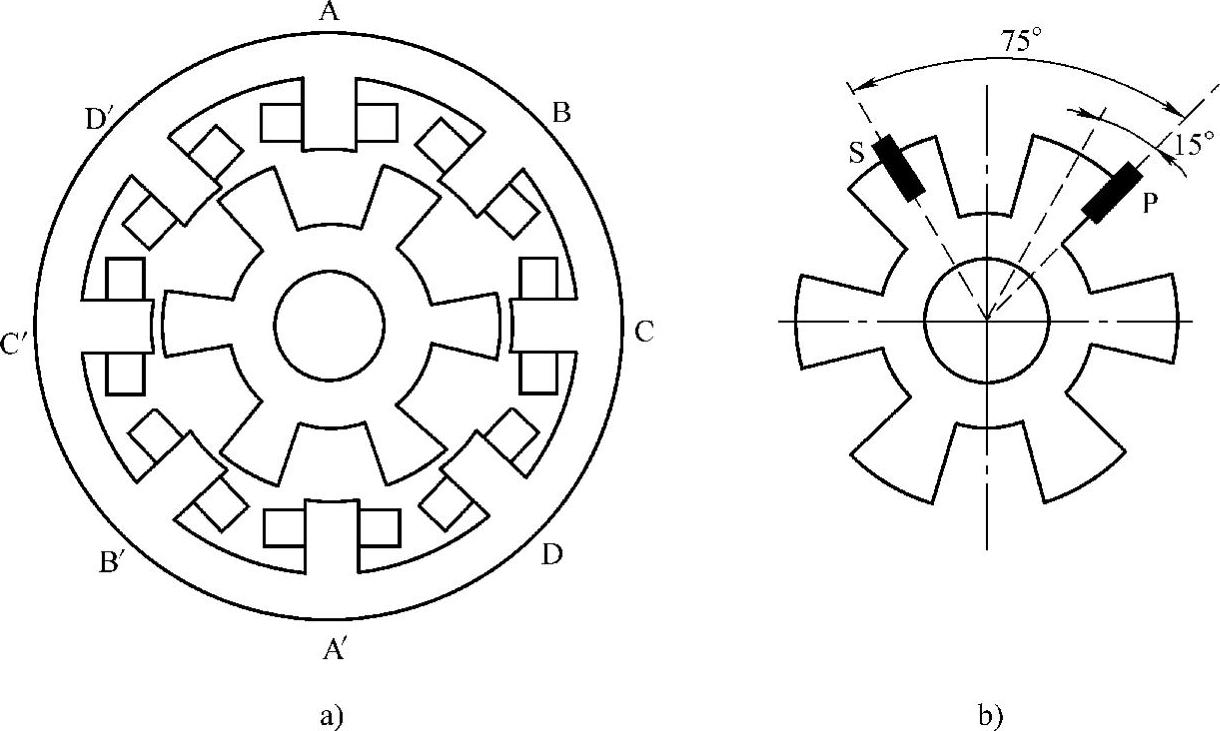
图4-1 四相(8/6)SR电动机用光敏式转子位置传感器检测转子位置
a)t=0,定转子相对位置 b)t=0,遮光盘与光电传感器S、P相对位置
设转子逆时针方向转动,以图4-1a所示的定、转子相对位置为计时零点,有S=0、P=1;逆时针转过15°,状态变为S=1、P=1;再转过15°,则S=1、P=0;再转过一个步距角,则S=0、P=0;再转过15°,转子已转过一个转子角周期(τr=60°),状态复原为起始的S=0、P=1,如此往复循环,如图4-2a所示。可类似分析转子顺时针方向转动的情况,如图4-2b所示。
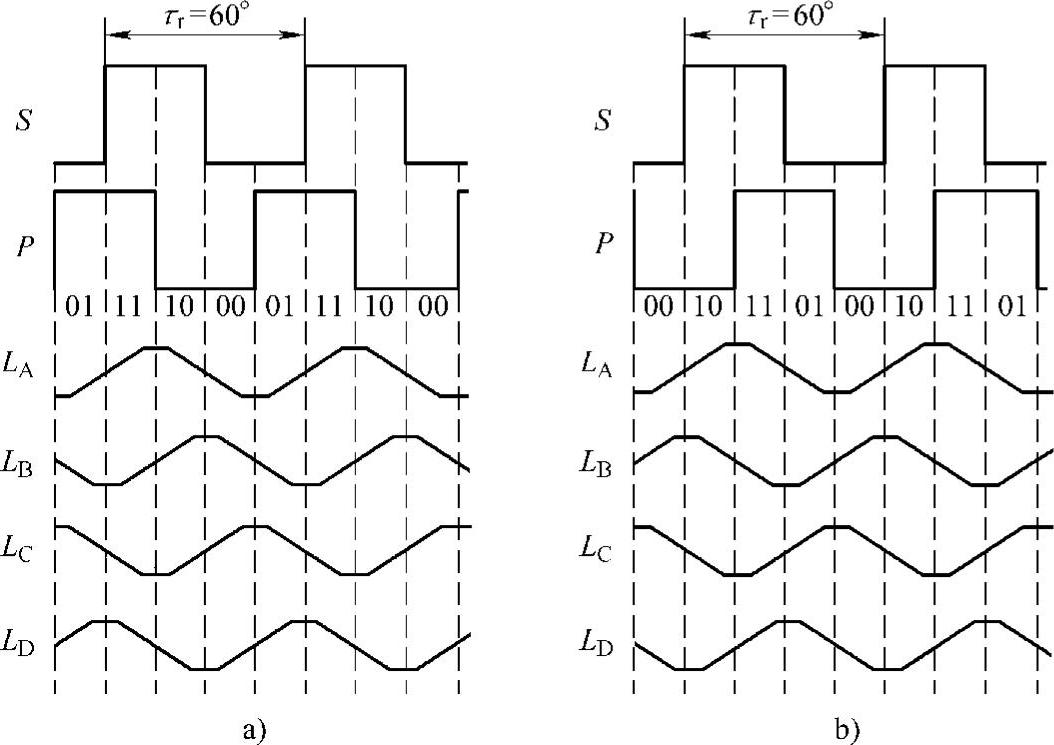
图4-2 与图4-1对应的四相(8/6)SR电动机转子位置信号及相电感变化(基于线性模型)
a)逆时针转动 b)顺时针转动
 (https://www.xing528.com)
(https://www.xing528.com)
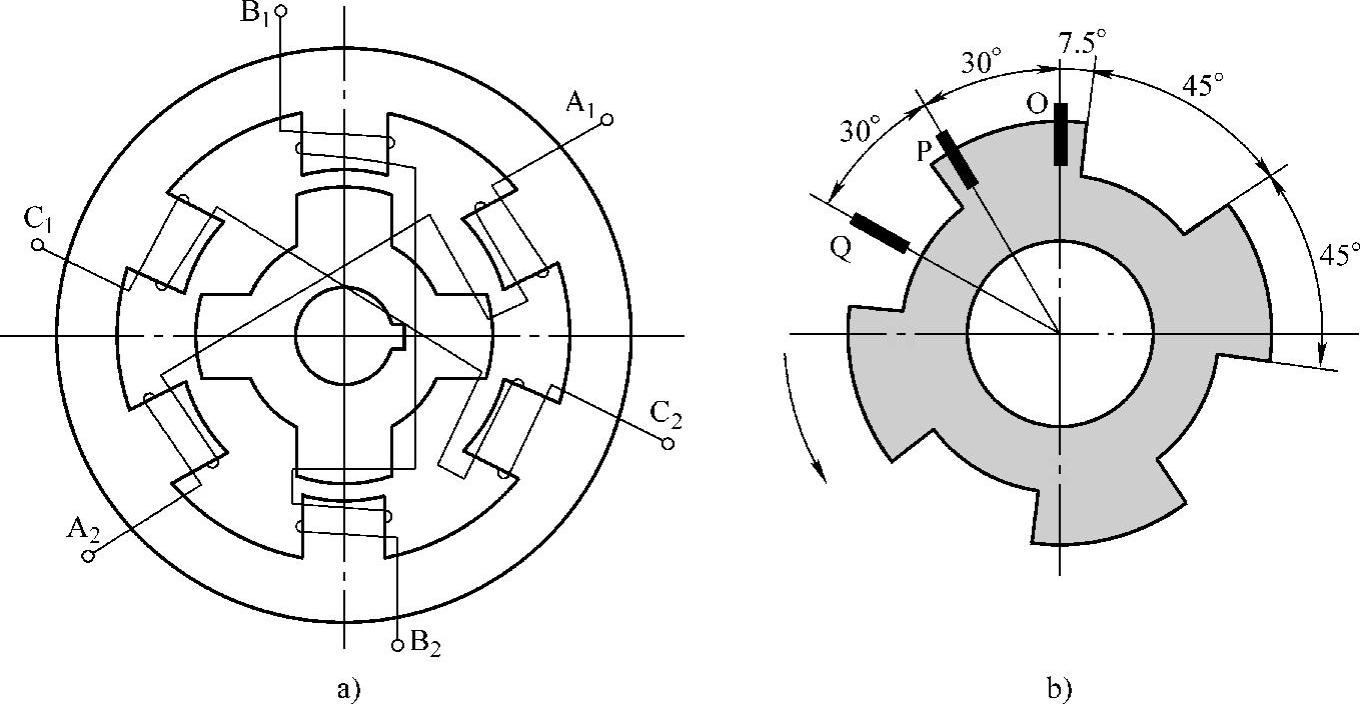
图4-3 三相(6/4)SR电动机用光敏式转子位置传感器检测转子位置
a)t=0,定转子相对位置 b)t=0,遮光盘与光电传感器O、P、Q相对位置
图4-3给出了三相(6/4)SR电动机(m=3,θstep=30°,τr=90°)全数检测方案。设转子逆时针转动,以图4-3a所示的定、转子相对位置为计时零点,可画出随着转子转动,各相电感及光电传感器O、P、Q的输出信号变化波形如图4-4所示。由图4-4可见,在一个转子角周期(90°)内,O、P、Q产生三个相位差为30°、占空比为50%的方波信号,其组合成六种不同的状态(每转过一半步距角,光电传感器O、P、Q的输出组合信号变化一次),分别对应三相绕组六种不同的参考位置。
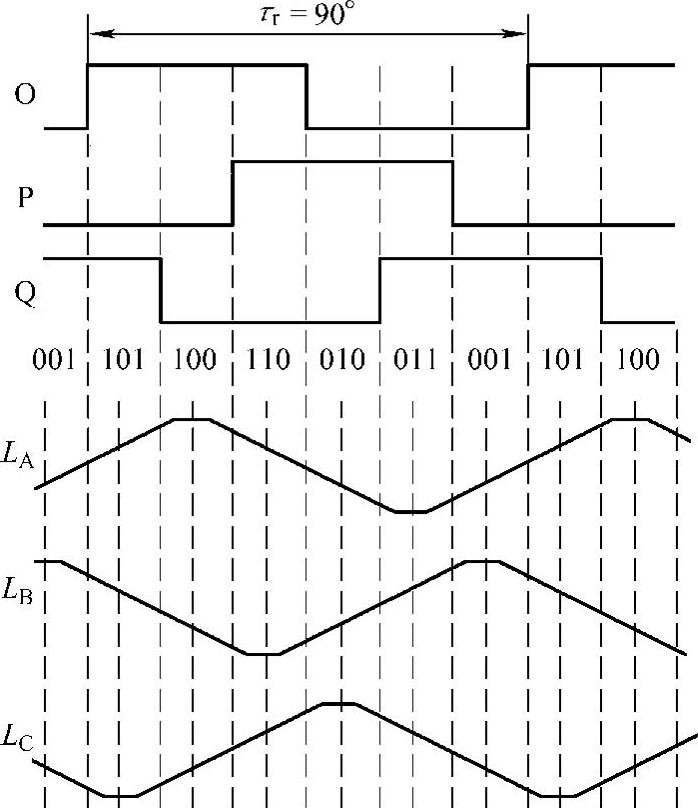
图4-4 与图4-3对应的三相(6/4)SR电动机转子位置信号及相电感变化(基于线性模型)
一路光敏式位置检测电路如图4-5所示。图中,SL为光电开关(其中,光敏晶体管为NPN型),R1为光电开关红外发射管的限流电阻,R2为光敏晶体管的负载电阻,C为高频滤波电容。对得到广泛应用的GK102、GK112、GK122等透射式光电开关而言,其响应时间约为5μs,发射管最大允许正向电流约为50mA,正向压降随正向电流增加有所增加,正向电流10mA对应的正向压降约为1.4V,因此图4-5中的R1可取值470Ω,以使正向电流接近10mA;R2亦应合理选择,以保证光电开关输出信号与后级电路能够达到电压、电流适配,一般可在(5.1~15)kΩ范围内选取。电容C的作用是滤除高频干扰信号,取值不宜大,否则将影响检测电路的快速性,一般可在(0.001~0.01)μF范围内选取。
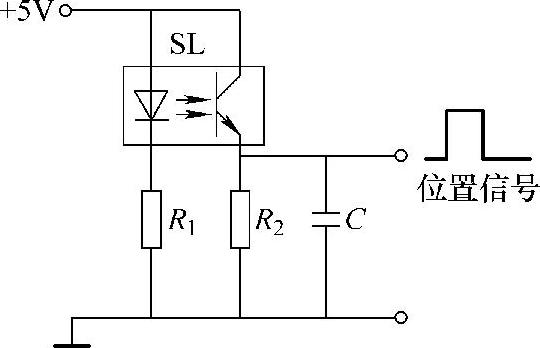
图4-5 光敏式位置检测电路
图4-5所示的检测电路输出的位置信号有一定的上升沿和下降沿,实际应用中,光敏晶体管输出信号可通过门电路整形后输出(见图4-6a)或通过一个迟滞比较器整形后输出(见图4-6b)以消除位置信号的“毛刺”和上升、下降沿。
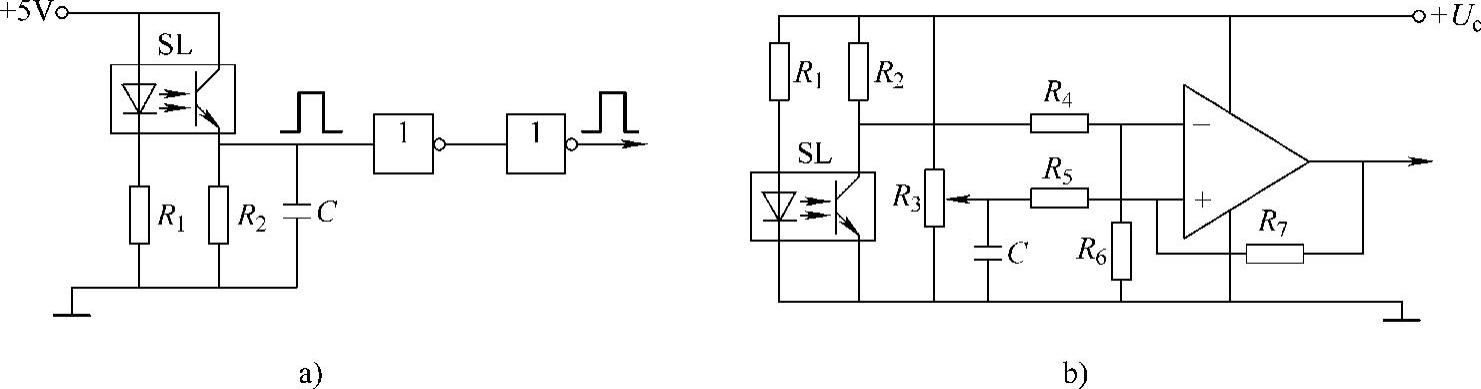
图4-6 带整形电路的光敏式位置检测电路
a)门电路整形 b)比较器整形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。