



这是在不对称半桥拓扑基础上开发的一类少开关器件功率变换器主电路,它不仅保留了不对称半桥功率变换器的优点,而且每相所用主开关器件少于两个,克服了不对称半桥电路中每相需要两个主开关器件的缺点。如图3-6a所示,改进电路通过将每个主开关器件接至一个以上的相绕组来实现开关器件总数的减少。例如,主开关器件Sb接至两个相绕组,而不是像不对称半桥电路那样只接至一个相绕组,但各相绕组仍应接在一个上主开关器件和一个下主开关器件之间。按此接法,若有nU个上主开关器件和nL个下主开关器件,则可接到功率变换器的绕组最多相数为
mmax=nUnL (3-1)
只要每个上主开关器件和每个下主开关器件之间接有一相绕组,则所能接的最大相数便可由式(3-1)给出。例如,采用三个上、下主开关器件时,接至功率变换器的绕组相数可达到9,这时每相分摊的平均主开关器件数小于1。无疑,这种结构使得增加SR电动机相数、减小转矩脉动,又不增加功率变换器成本成为可能。但是,此类功率变换器中任一个主开关器件的工作状态必须根据与其连接的所有相绕组的电流要求来确定,故需要设计保持对所有相电流进行独立控制的主开关器件通断控制策略,同时需合理安排各相绕组接至功率变换器的接线位置。
参考文献[50]定义电感重叠系数为

式中,βs为定子极弧角;θstep为步距角。若KL<0,相邻两相的电感上升区无重叠,合成电磁转矩将不连续;若KL=0,为了使合成转矩不间断,前、后相邻相电流的下降沿、上升沿将重叠,这是该类功率变换器必须避免的情况;若KL>0.5,电感上升区有一半以上存在重叠,将出现三相电流需同时控制的区域,这时对该类功率变换器而言,实现不了相电流的独立控制。有鉴于此,参考文献[50]指出,电感重叠系数在0.2~0.5间的SR电动机最适合采用该类功率变换器,因为这样既可使某相电流在其相邻前相电流下降之前就得以充分建立,避免了相邻相电流下降沿、上升沿发生重叠,又使得只有两相电流需同时控制,可实现相电流的独立控制。
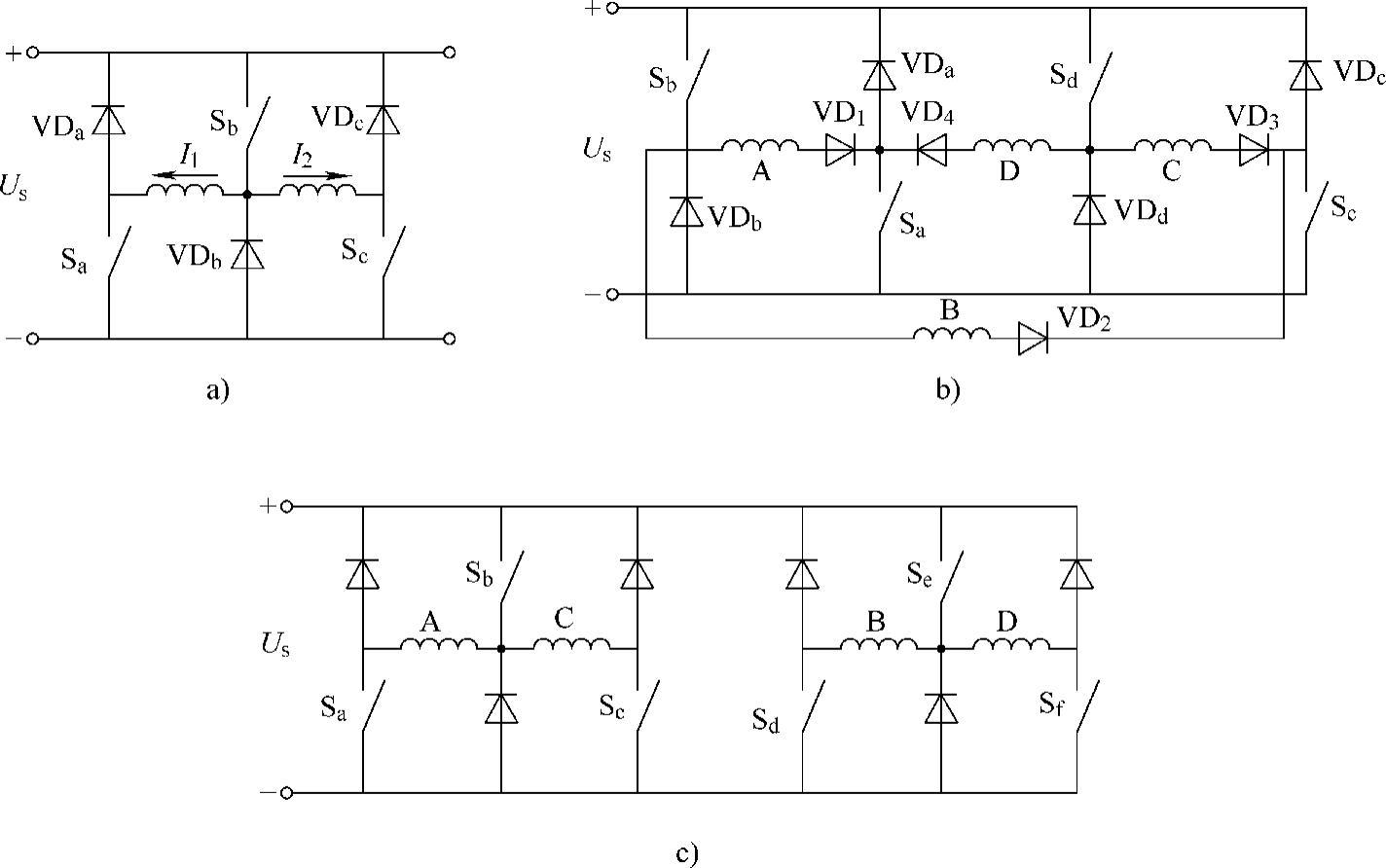
图3-6 少主开关器件的功率变换器电路(https://www.xing528.com)
a)基本电路 b)采用四个主开关器件的四相功率变换器 c)采用六个主开关器件的四相功率变换器
图3-6b所示为采用四个主开关器件的四相功率变换器主电路,其中每个主开关器件均与电动机的两相绕组相接,而该两相绕组的电流则同时受这一主开关器件的运行状态制约。注意,图中将有重叠电流区间的相邻相绕组(如A相与B相、D相与A相等)接至同一个主开关器件,由于电感重叠系数不超过0.5,故在前相绕组需退磁释放磁能时,与之相邻的后相电流已到达其斩波阈值,采用图中接法可实现两相电流独立控制。另外,图3-6b所示的电路中,有四个整流二极管VD1~VD4分别与各相绕组串联,以保证电路中其他主开关器件导通时,反向电流不能流过该绕组。
图3-6b所示的主电路的各相绕组分别接至相应的上、下主开关器件,每相平均只用一个主开关器件,其与图3-3b所示的双极性电源四相功率变换器相比,所用主开关器件数相同,但其电源不仅是单极性的,而且可利用全部电源电压Us对相绕组进行励磁和退磁控制,此外还可提供零电压续流回路。但是图3-6b所示的电路中的每个主开关器件均为两相绕组共用,这导致相电流下降时间增加,退磁不够迅速。图3-6c所示的电路通过增加两个主开关器件来克服这一局限。对四相(8/6)SR电动机而言,在其电感重叠系数<0.5的条件下,A相和C相、B相和D相的电流一般不会重叠,因此可保证任一时刻流过图3-6c中各主开关器件的电流仅是一相绕组的电流,通过主开关器件的电流峰值即为相电流峰值,各主开关器件的热损耗不再相等。显然,与单独接至各相绕组的主开关器件Sa、Sd、Se、Sf相比,接至两相绕组的主开关器件Sb、Sc的热损耗较大,但显著增加了控制的灵活性。
表3-2给出了图3-6c所示的主电路与其他两种传统主电路在器件额定值及kVA容量方面的比较。其中,UN表示SR电动机的额定电压;I表示相电流有效值;ip表示相电流峰值。
表3-2 三种四相功率变换器主电路比较
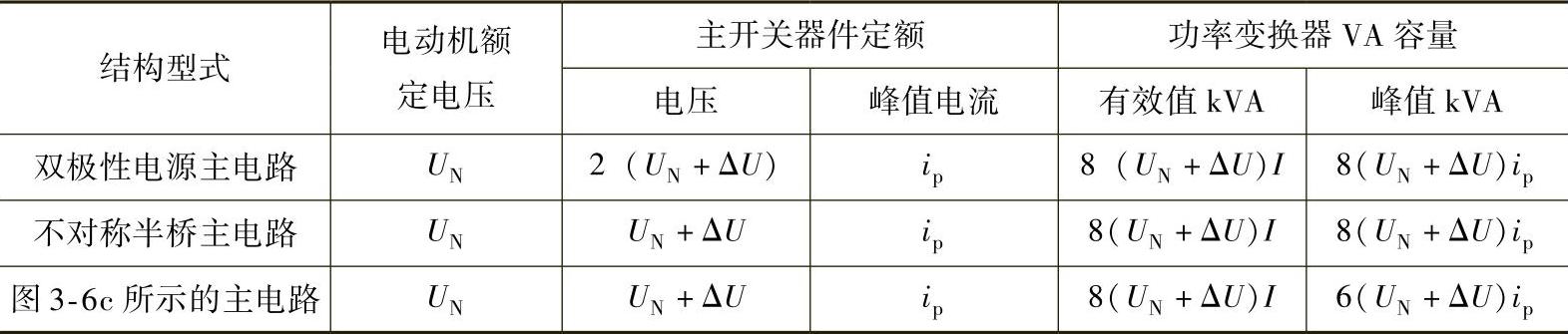
由表3-2可见,图3-6c所示的主电路虽然较传统的双极性电源电路多用了两个主开关器件,但两者有效值kVA容量是一样的,而且前者峰值kVA容量比后者还小,因此若选用GTR、IGBT、MOSFET这类以峰值电流定额为主要选型依据的器件作为主开关器件,再加上考虑到双极性电源主电路需要两个高压大电容,图3-6c所示的主电路在性能/价格比上具有一定优势。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。