



SRD作为一种高性能的调速系统,可方便地实现四象限运行,即正、反向电动、制动运行。其中,制动运行有两种用途:一是利用电磁制动转矩实现降速和快速停车;二是将转轴上输入的机械能转变为电能,即发电工作,作开关磁阻发电机(Switched Reluctance Generator,SRG)用。SR电动机回馈制动(再生制动)的实现十分方便,只要加大相绕组的开通角θon,使相电流主要在∂L/∂θ<0区间内出现即可,如图2-60所示。
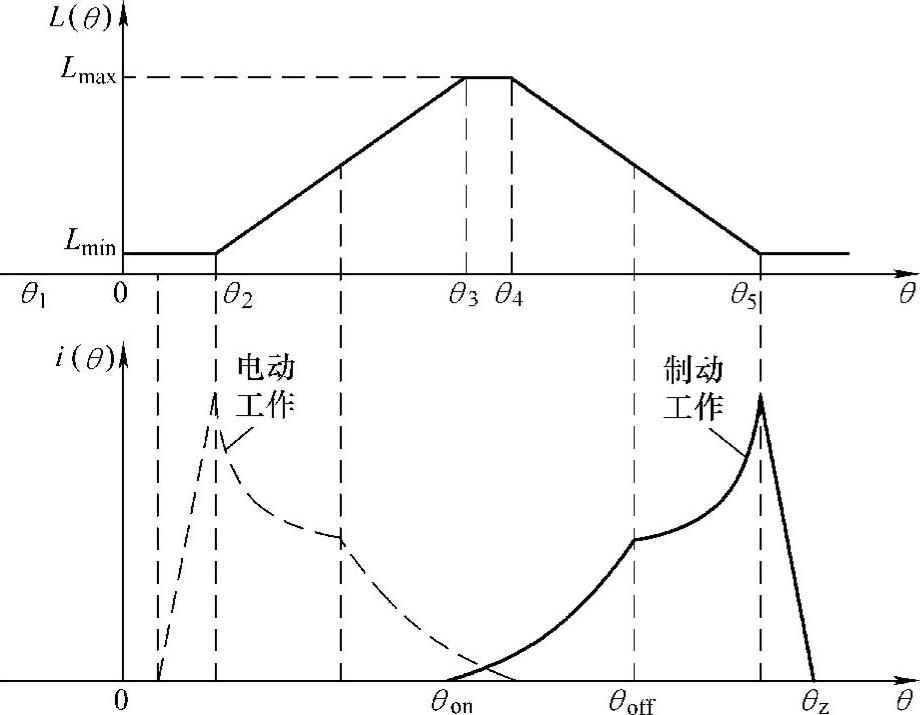
图2-60 电动、制动工作典型相电流与转子位置角的关系(基于线性模型)
由图2-60可见,制动工作的相电流波形与电动工作的相电流波形对i轴是对称的,这表明了开关磁阻电机的可逆性。制动工作的相电流主要建立在∂L/∂θ<0区间,且在电感下降区关断,关断时旋转电动势与相电流方向一致,若忽略绕组电阻压降,当旋转电动势高于外电源电压时,续流电流将继续上升,直至在最小电感区域,旋转电动势消失,续流电流快速下降,如图2-60所示。
由开关磁阻电机的可逆性,与电动运行调速控制方法相对应,对制动运行的控制亦主要是调控励磁阶段的电流,且有CCC、电压PWM、APC三种调节电磁制动转矩的方法。
在2.3.3节中,基于SR电动机线性模型式(2-9),且忽略相绕组电阻,求解式(2-22),推导了APC方式下电动工作状态SR电动机相电流的分段解析式。类似2.3.3节的推导过程,不失一般性,设θ2<θon<θ3,可推出APC方式下制动工作状态相电流的分段解析式为
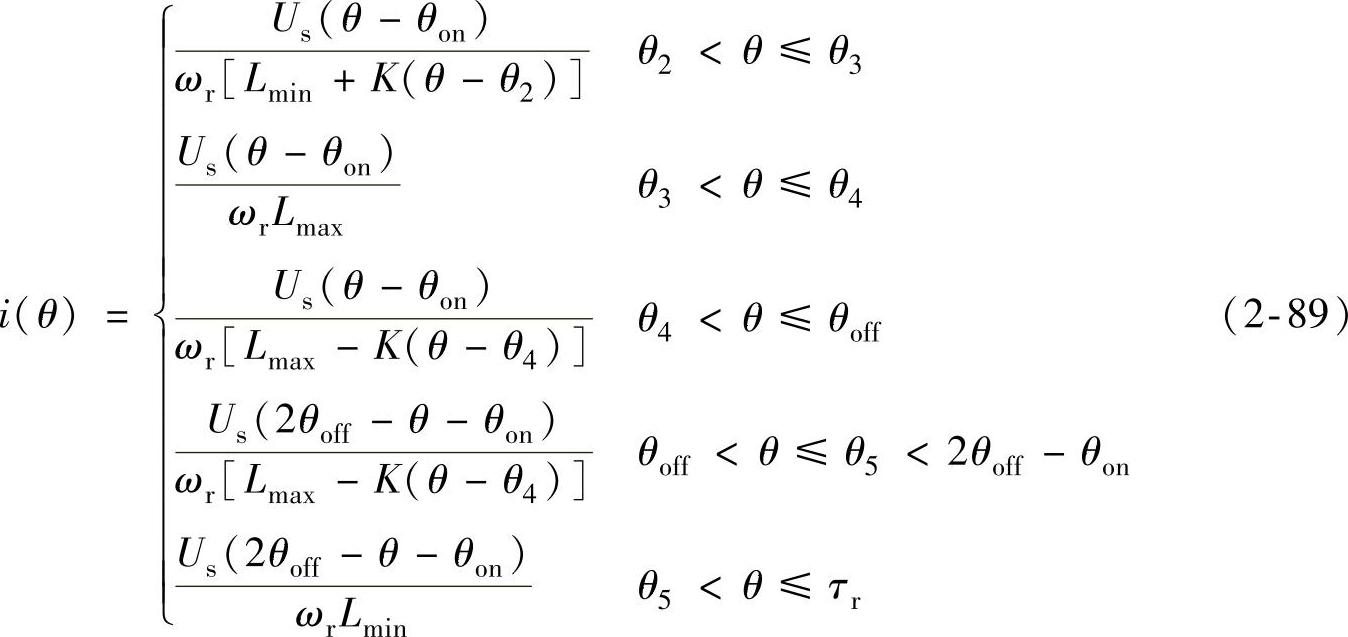
式中,K=(Lmax-Lmin)/(θ3-θ2)=(Lmax-Lmin)/(θ5-θ4)。
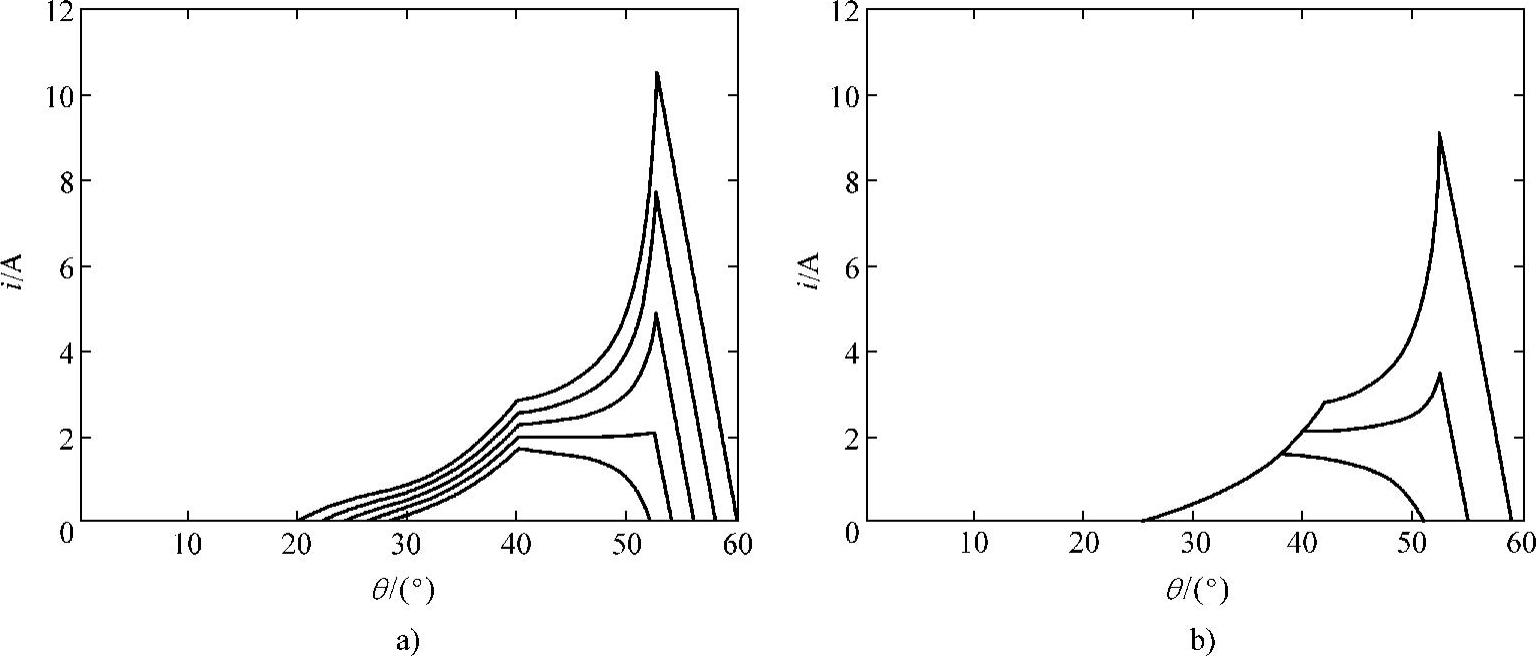
由式(2-89)可得到在不同θon、θoff组合下的制动工作状态相电流。图2-61是某四相(8/6极)SR电动机在Us、ωr恒定,制动工作状态下相电流随θon、θoff变化的仿真波形。
 (https://www.xing528.com)
(https://www.xing528.com)
图2-61 不同θon、θoff组合下的制动工作状态时相电流仿真波形(基于线性模型)
a)θoff=40°,θon=20°、22°、24°、26°、28° b)θon=25°,θoff=38°、40°、42°
由图2-61可见,当关断角θoff固定、开通角θon较小时,相电流(包括续流电流)较大,将形成较大的电磁制动转矩;而当开通角θon固定时,若关断角较小,励磁时间较短,则相电流(包括续流电流)较小,制动转矩亦较小。因此,和SR电动机电动运行一样,θon、θoff是制动运行时控制其电磁转矩、功率的主要参数。前面已指出,当外加电压Us及θon、θoff固定时,电动运行的SR电动机具有与串励直流电动机相同的外特性,由开关磁阻电机的可逆性,可推知若θon、θoff固定,其制动运行的外特性与串励直流发电机的外特性相同,即有
Us∝ILωr (2-90)
式中,Us为输出电压;IL为负载电流。
事实上,制动运行时,通过调节θon、θoff可实现期望的控制性能。例如,可通过θon、θoff的调节,使在不同的ILωr值下输出电压Us保持恒定。
以上分析基于线性模型且忽略了相绕组电阻,若要提高分析的精度,应计及绕组电阻及相电感的饱和非线性,即采用非线性模型进行数值仿真。只要对3.8节的电动工作状态仿真模型略作修改,即可建立开关磁阻电机制动工作状态下非线性动态仿真模型。图2-62为样机2在CCC方式下制动运行相电流及电磁转矩非线性仿真的结果。
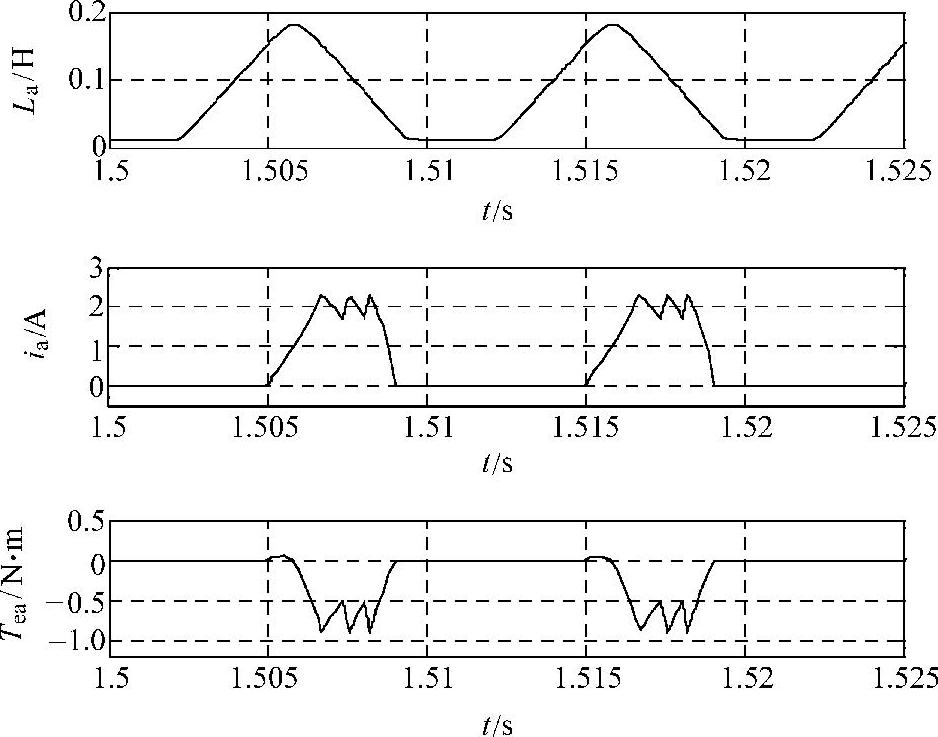
图2-62 样机2在制动运行时一相电流及其电磁转矩非线性仿真结果(CCC方式,θon=38°,θoff=67°,ωr=157rad/s)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。