



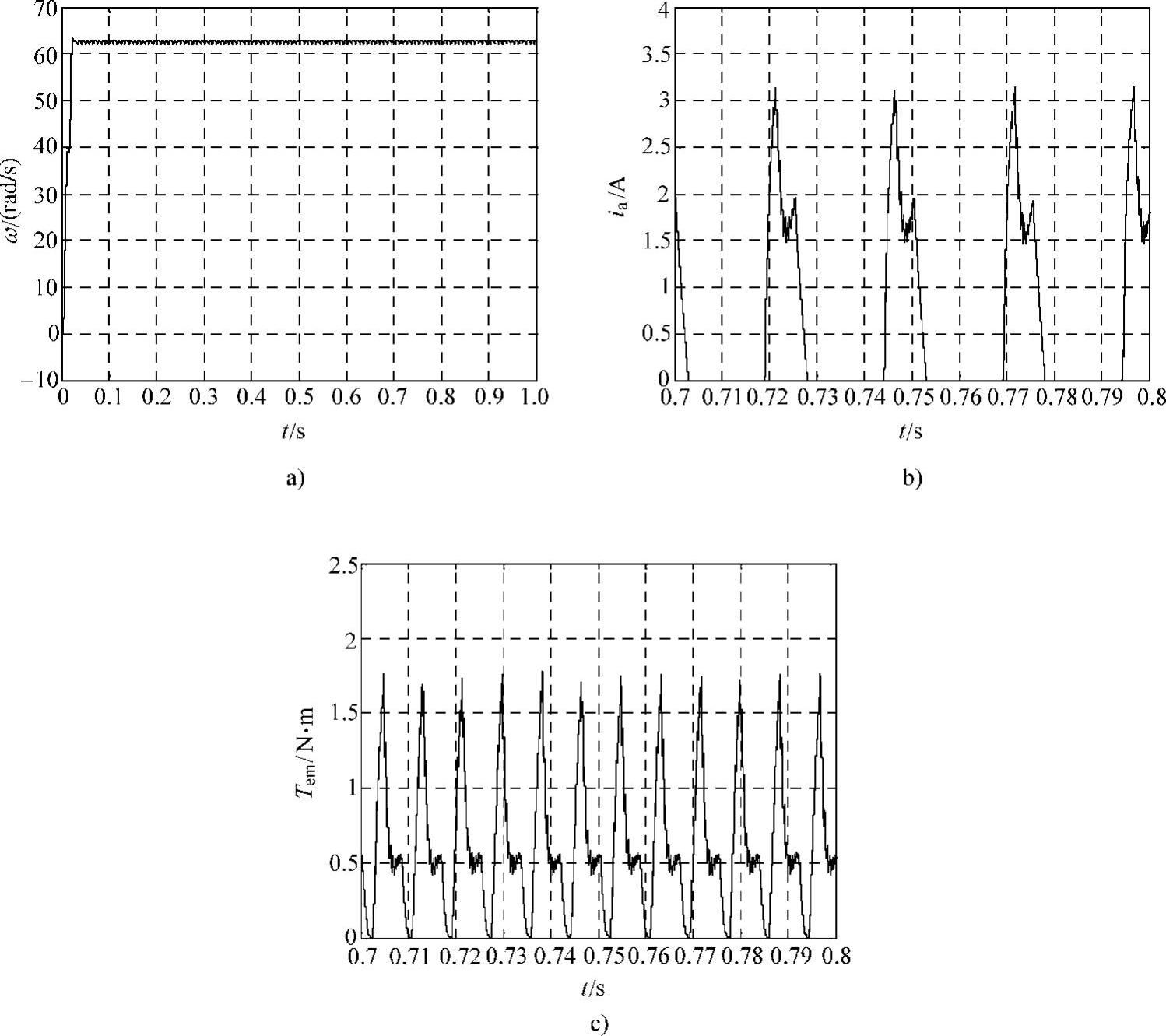
图2-50 样机2在电压PWM控制方式下运行仿真结果(给定角速度62.8rad/s、负载转矩0.1N·m、θon=16°、θoff=38.5°,斩波频率2kHz)
a)起动过程及稳态运行角速度 b)稳态相电流 c)稳态合成转矩
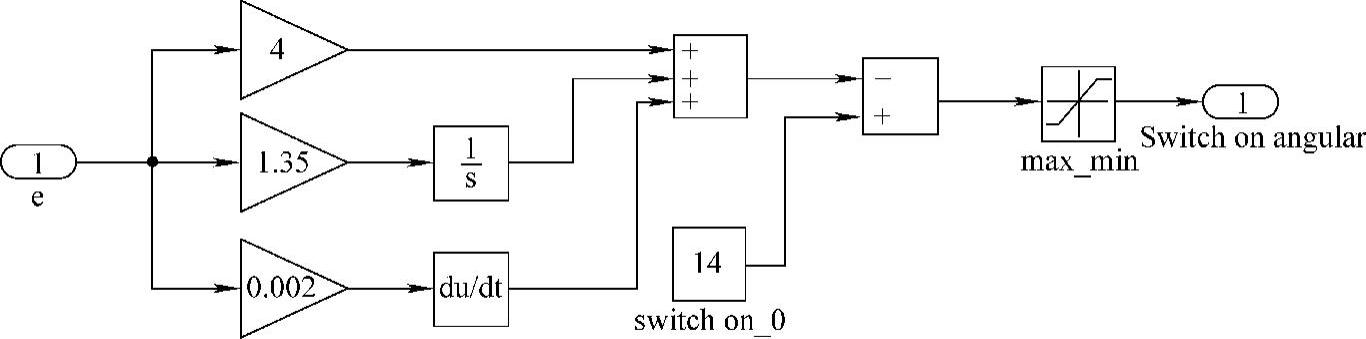
图2-51 APC方式下的转速环PID(关断角固定,调节开通角)
可参照三相(6/4极)SRD仿真建模的思路及方法研究四相(8/6极)SRD仿真建模。图2-54为样机1在CCC方式下闭环调速系统仿真模型。与图2-40相比,图2-54中的主电路及SRM本体模型增加了一相(D相),此外,因四相(8/6极)SR电动机的步进角为15°,转子角周期为60°,故其转子位置检测仿真模型(见图2-55)及换相逻辑控制仿真模型(见图2-56)与三相(6/4极)SRD(其步进角为30°,转子角周期为90°)亦有差异,读者可参照前面对图2-45、图2-46建模思路的分析,自行分析图2-55、图2-56的仿真模型。同样,类似于2.8.1节的分析,可建立四相(8/6极)SRD在电压PWM、APC方式下的仿真模型,限于篇幅,不赘述。图2-57~图2-59为样机1在不同控制方式下运行的仿真结果。
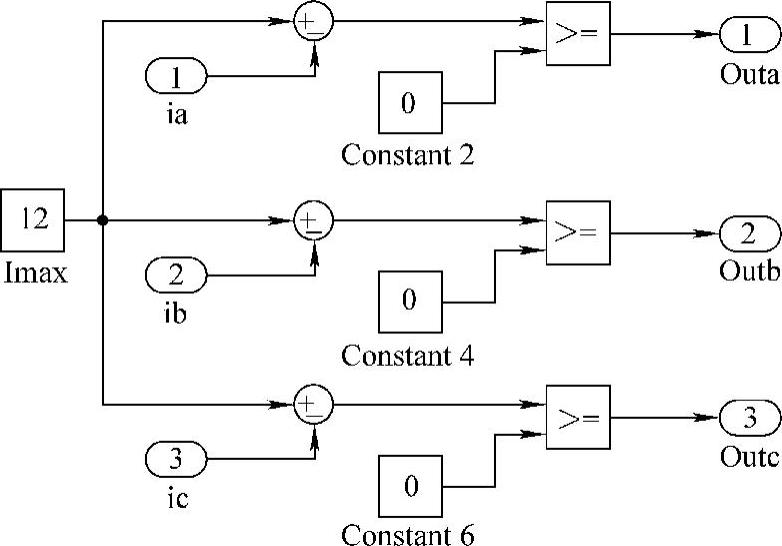
图2-52 APC方式下的限流模块
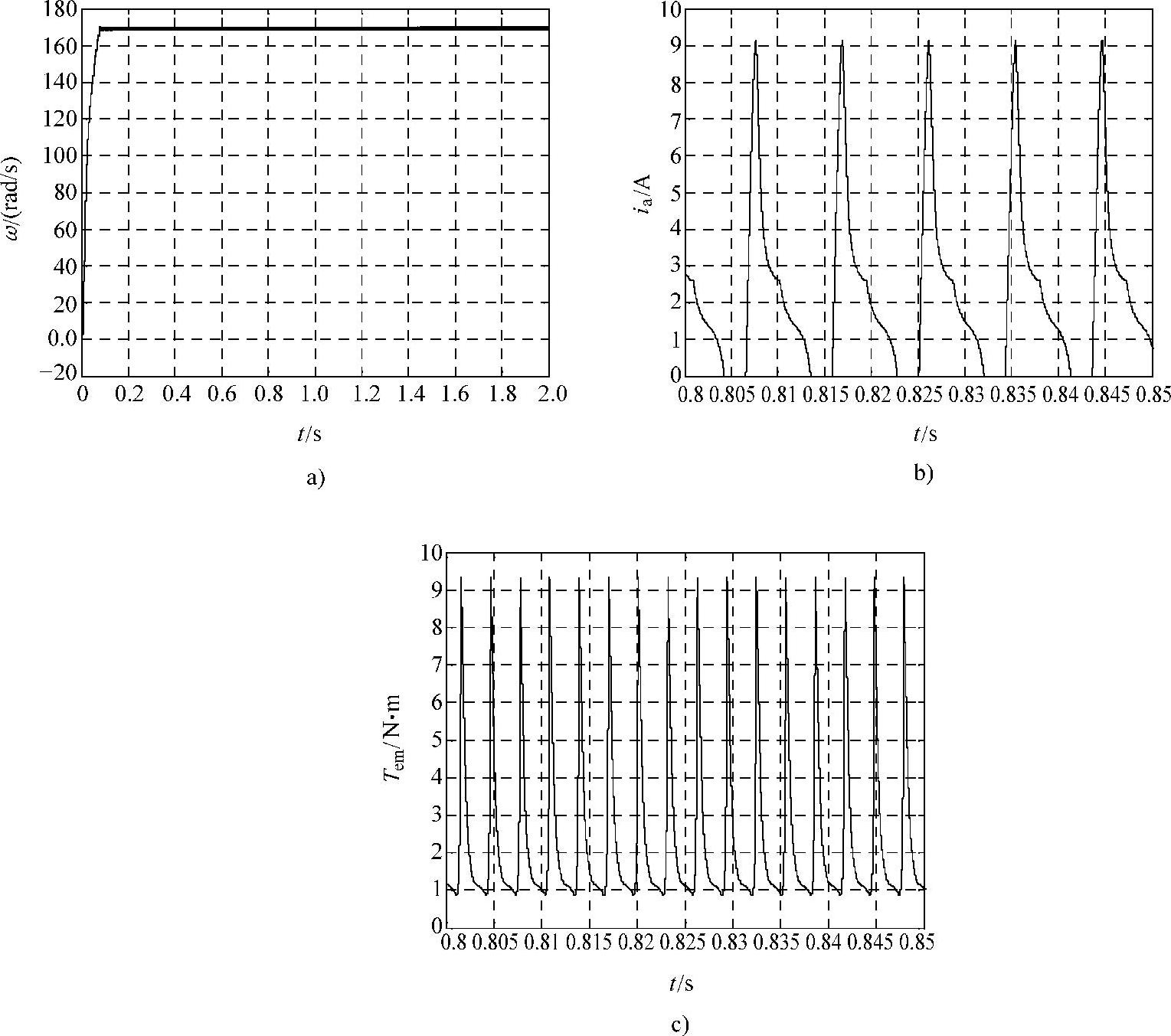
图2-53 样机2在APC方式下运行仿真结果(给定角速度170rad/s、负载转矩1N·m、θoff固定为38°)
a)起动过程及稳态运行角速度 b)稳态相电流 c)稳态合成转矩
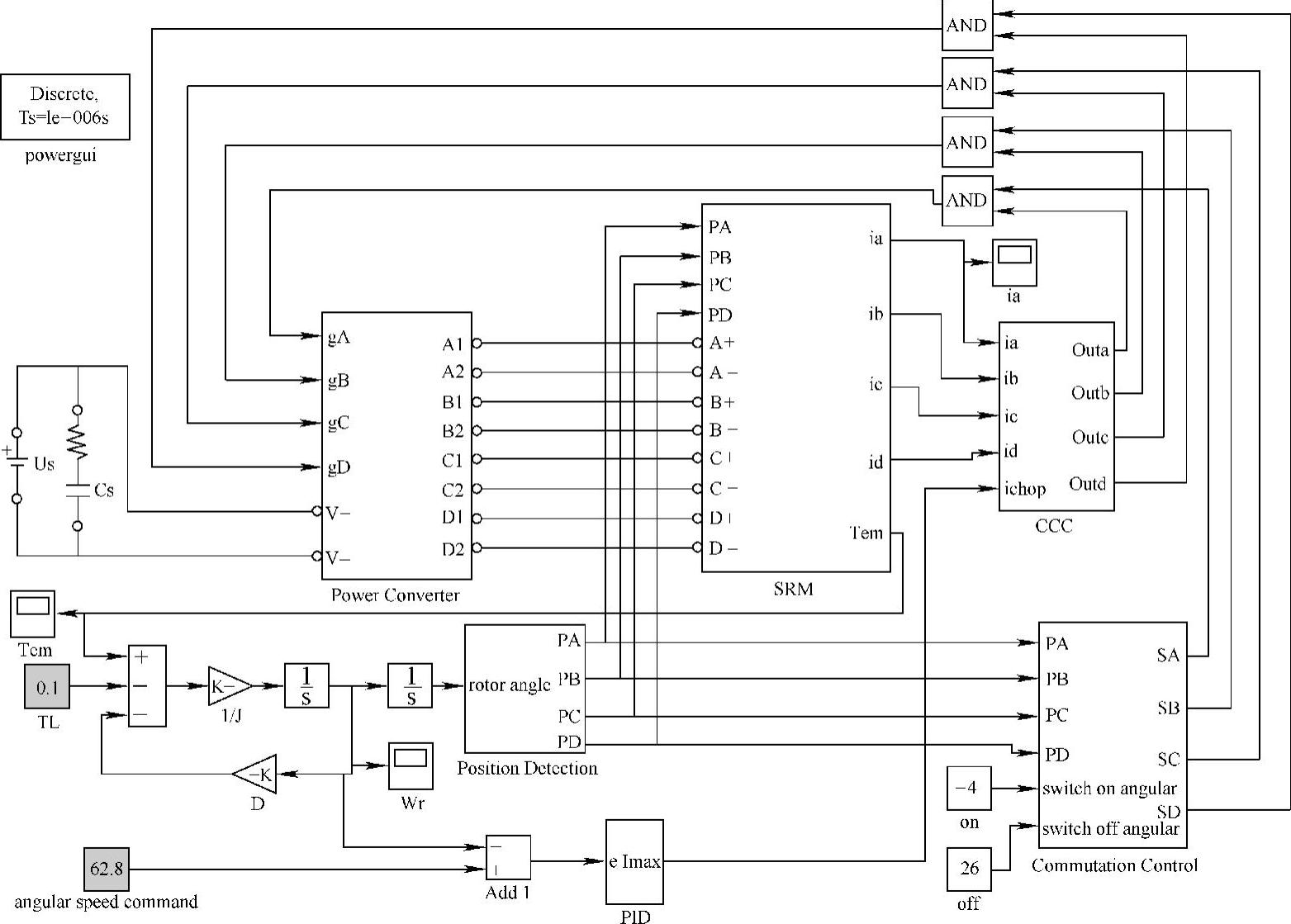
图2-54 四相(8/6极)SRD仿真模型(CCC方式)
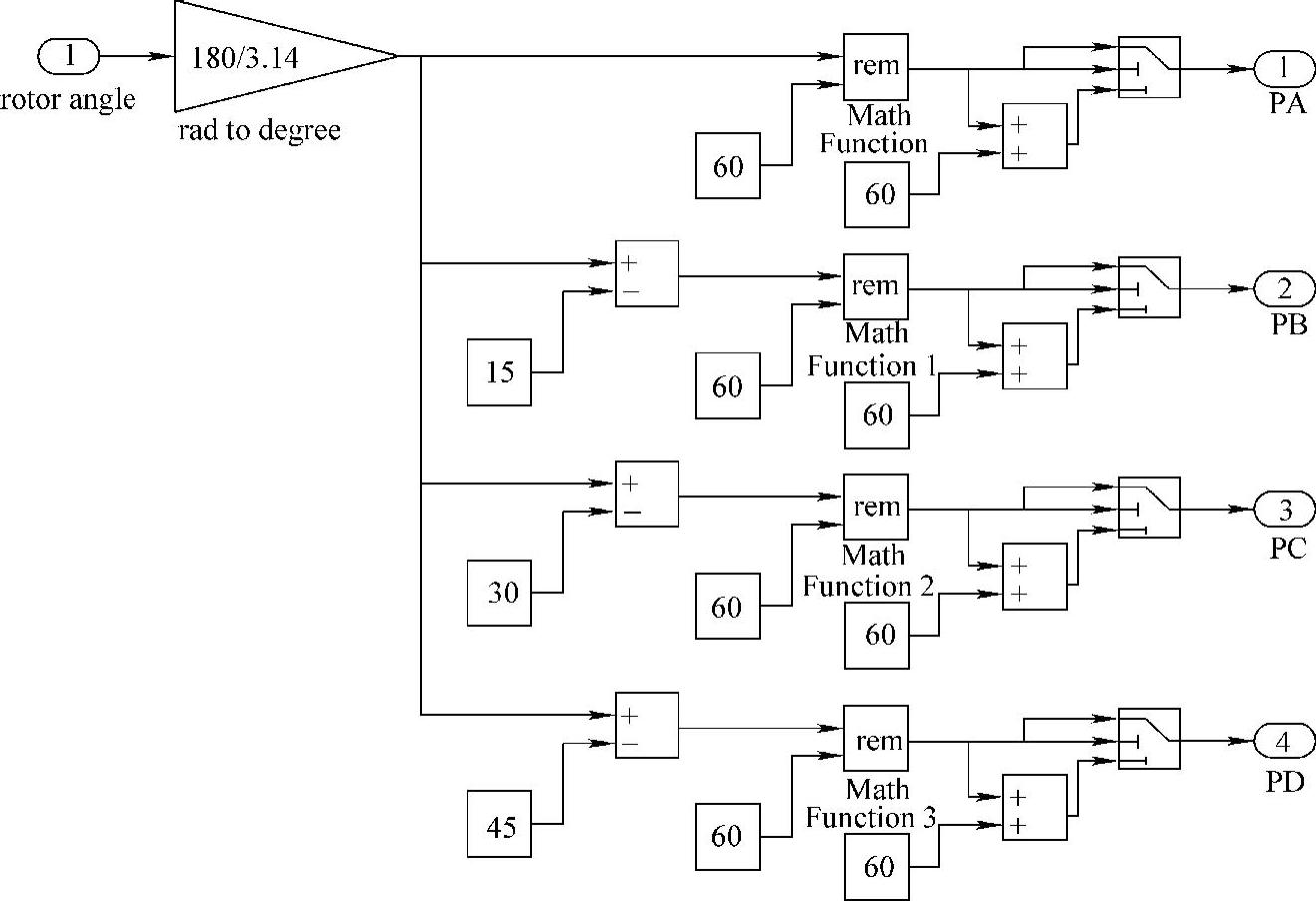
图2-55 样机1转子位置检测仿真模型(https://www.xing528.com)
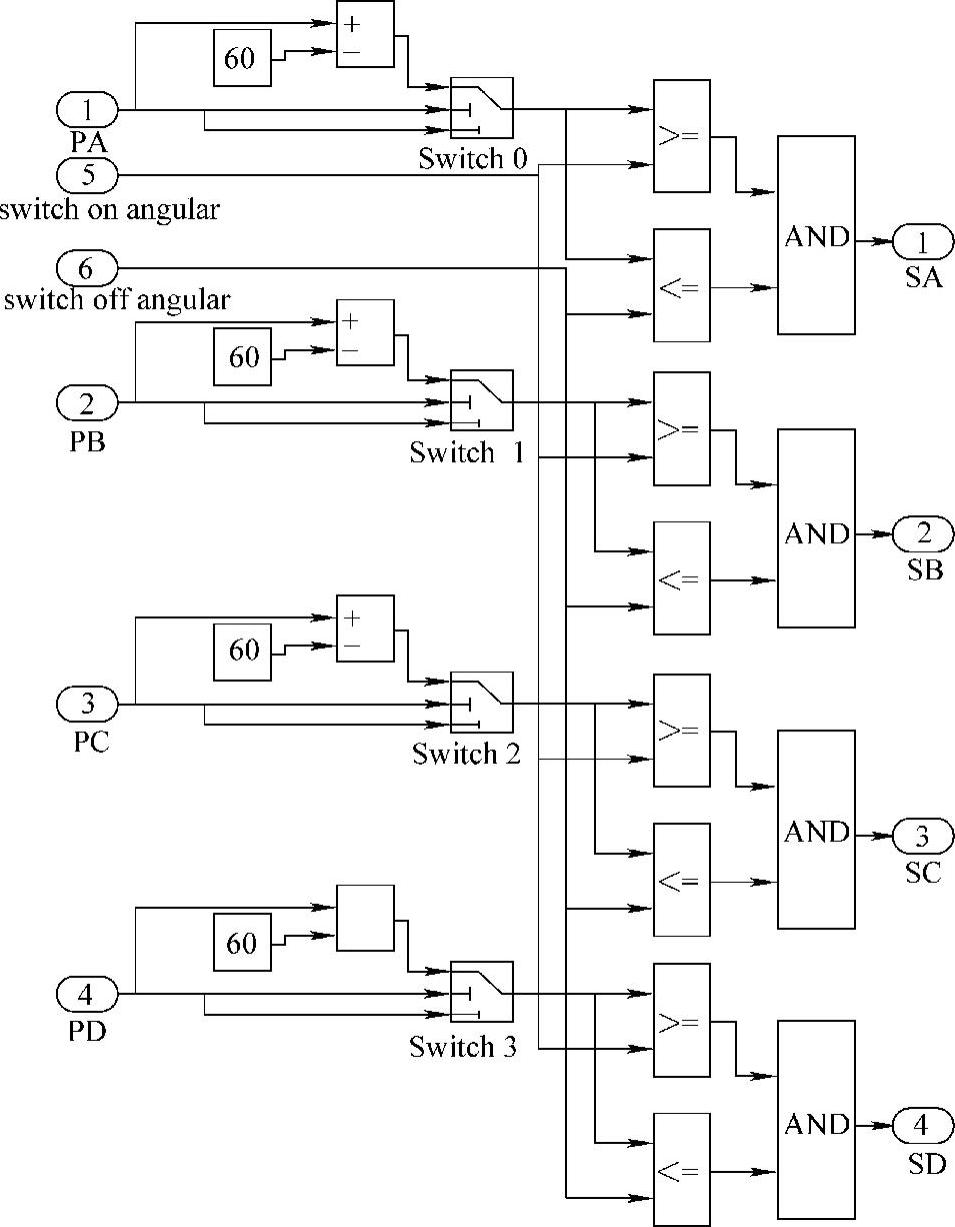
图2-56 样机1换相逻辑控制仿真模型
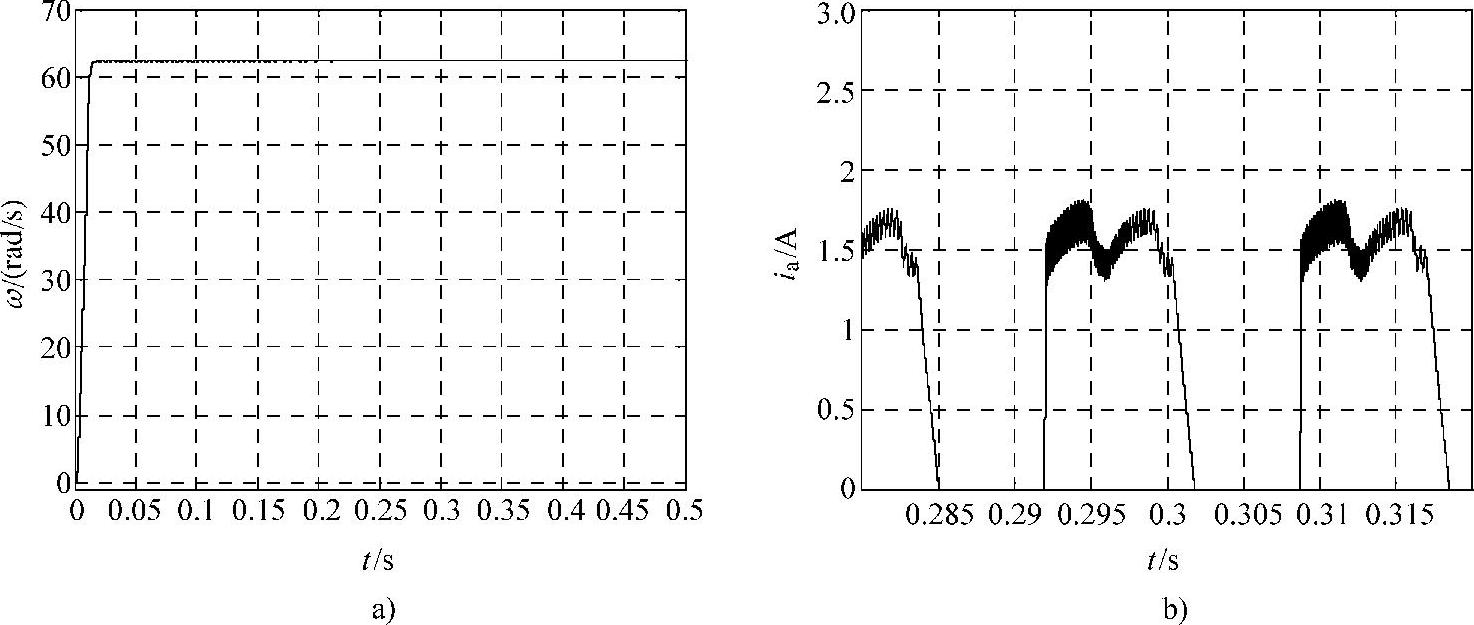
图2-57 样机1在CCC方式下运行仿真结果(给定角速度62.8rad/s、负载转矩0.1N·m、θon=-4°、θoff=26°)
a)起动过程及稳态运行角速度 b)稳态相电流
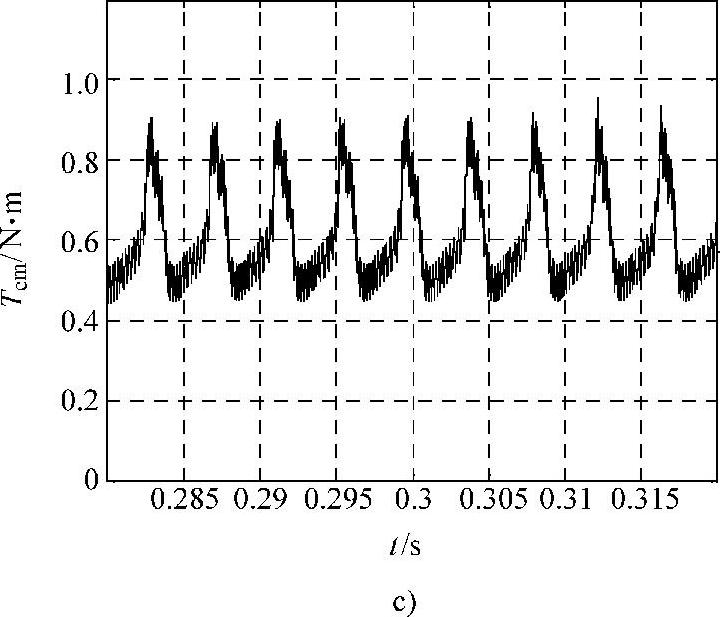
图2-57 样机1在CCC方式下运行仿真结果(续)(给定角速度62.8rad/s、负载转矩0.1N·m、θon=-4°、θoff=26°)
c)稳态合成转矩
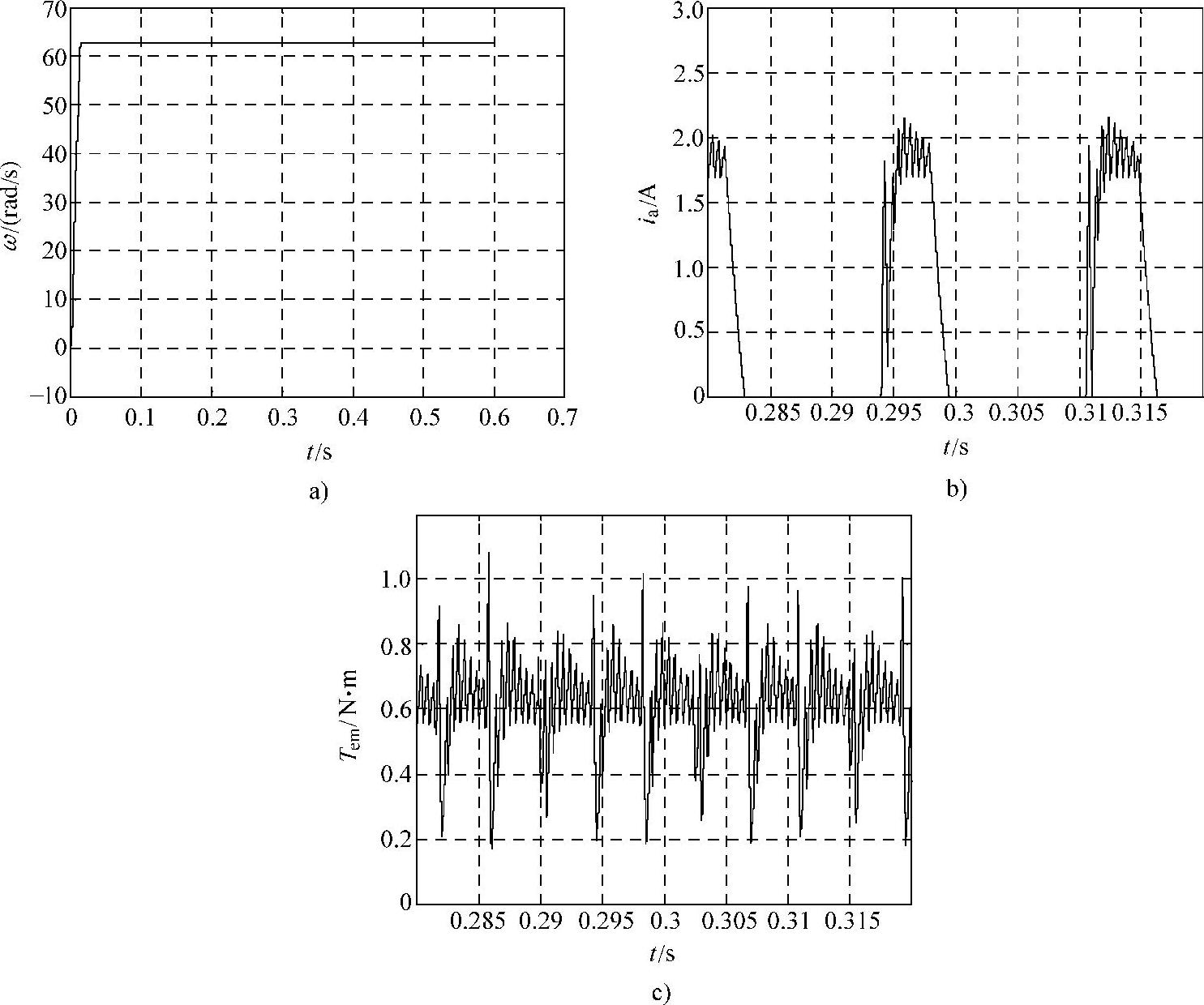
图2-58 样机1在电压PWM方式下运行仿真结果(给定角速度62.8rad/s、负载转矩0.1N·m、θon=7°、θoff=22°、斩波频率2kHz)
a)起动过程及稳态运行角速度 b)稳态相电流 c)稳态合成转矩
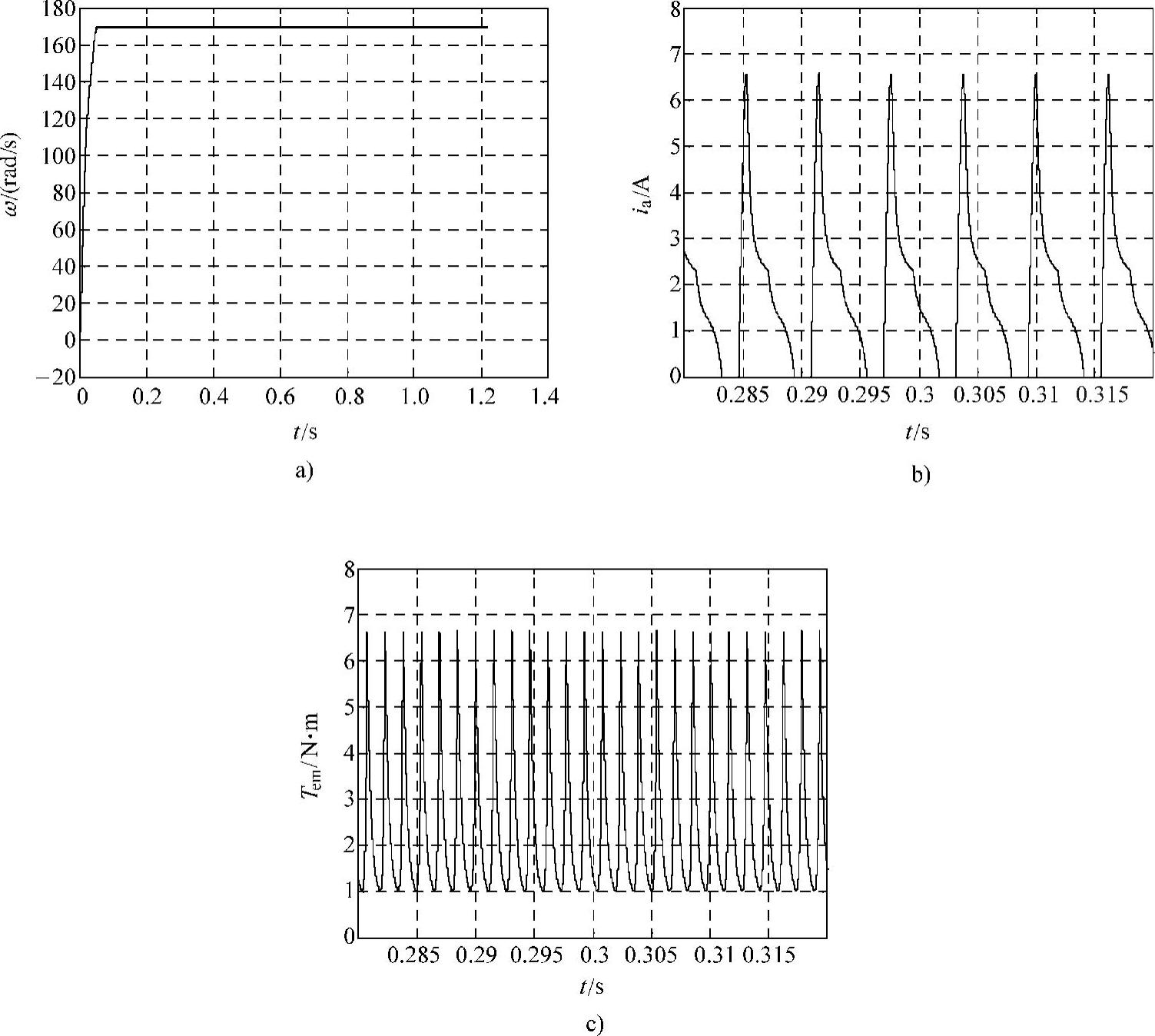
图2-59 样机1在APC方式下运行仿真结果(给定角速度170rad/s、负载转矩1N·m、θoff固定为25°)
a)起动过程及稳态运行角速度 b)稳态相电流 c)稳态合成转矩
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。