



采用MATLAB Simulink/SimPower System建立的样机2在CCC方式下的闭环调速系统仿真模型如图2-40所示。
图2-40中,SRM为样机2的本体模型;Power Converter为功率变换器模型;Us为输入直流电源(120V),因为MATLAB不允许将纯电容与电压源并联,故将功率变换器直流母线并联电容Cs(1000μF)与一小电阻(0.1Ω)串联后再与Us并联;Position Detection为位置检测环节;Commutation Control为换相逻辑控制;CCC为电流滞环控制,其输出信号和换相逻辑控制信号相与后作为功率变换器主开关器件门极的控制信号;给定角速度(angular speed command)与SR电动机转子实际角速度(Wr)相减,得到速度偏差(e),经PID调节后,输出CCC方式下电流限幅指令值Imax;根据式(2-5),SRM输出的电磁转矩Tem减去负载转矩TL和摩擦转矩(D为粘性摩擦系数,取0.00813 N·m(rad/s)-1)得加速转矩Jdω/dt(J为转动惯量,取0.0017kg·m2),角速度经积分器输出角位移信息(rotor angle)至Position Detection模块。图中四个输入常数信号TL、angular speed com-mand、on、off分别为负载转矩、角速度给定、开通角、关断角,仿真前可设置。下面对封装的各子模块详细说明。
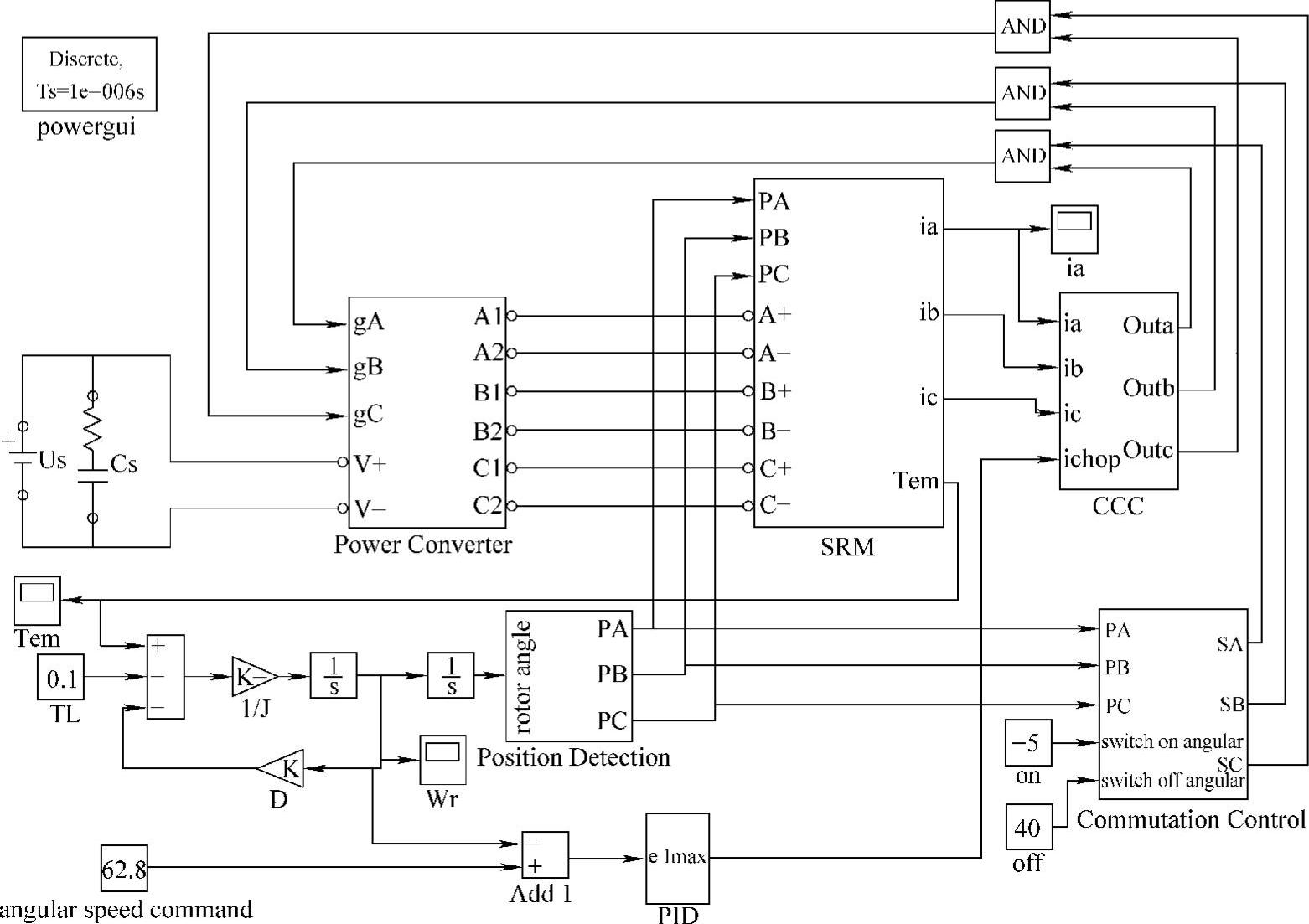
图2-40 三相(6/4极)SRD仿真模型(CCC方式)
图2-41为主开关器件选用IGBT的三相不对称半桥功率变换器主电路仿真模型,图2-41b给出了A相主电路详情,其余相与此相同。
图2-42为样机2的本体仿真模型,假设各相参数对称且忽略相间互感耦合,则各相具有相同的电磁特性,相邻相之间只是彼此错开30°机械角。由式(2-4),得任一相(k相)电流满足式(2-88),即

根据式(2-88)搭建的A相子系统仿真模型如图2-42b所示,A+、A-两端为图2-41b所示不对称半桥功率变换器施加给A相绕组的电压Ua,Voltage Meas-urement(电压测量)输出端v输出的信号为Ua-iaRa,采用受控电流源(Con-trolled Current Source)与Ra串联作为A相绕组的仿真模型,受控电流源的输入控制信号为根据式(2-88)右边构建的A相电流ia,而A相的非线性电感L(θ,i)采用91×12(行×列)的2D表格模块Look-Up Table(2-D)_L建模,其第1行、第91行分别对应θ=0°、θ=90°,行与行之间的角度增量为1°;第1列、第12列分别对应i=1A、12A,列与列之间的电流增量为1A。MATLAB提供了几种可选的查表方法(样机2建模选取外推插值方法),Look-Up Table(2-D)_L模块中的数据采用基于特殊位置磁化曲线的磁链分区解析拟合(见2.6.1节)方法获得,如图2-43所示。A相的电磁转矩T(θ,i)采用91×13的2D表格模块Look-Up Table(2-D)_T建模,其第1行~第91行仍分别对应θ=0°~90°;第1列~第13列则对应i=0~12A,列间间隔仍为1A,表格中的数据基于电磁转矩分区解析表达式(见2.6.3节)计算获得,如图2-44所示。三相瞬时转矩torque_a、torque_b、torque_c依次错开30°机械角,将其相加即为三相合成转矩Tem。
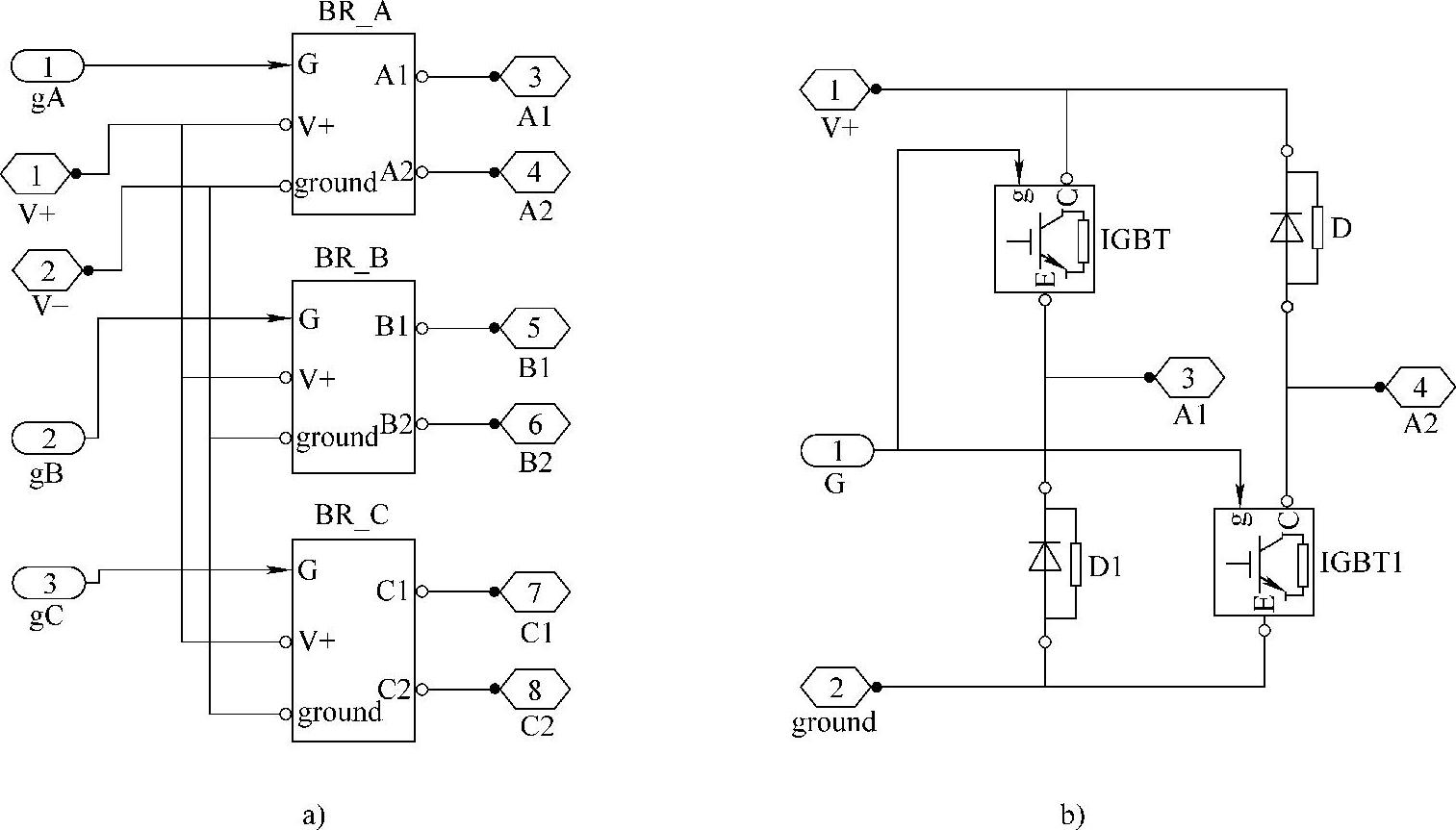
图2-41 三相不对称半桥功率变换器主电路仿真模型
a)三相主电路整体 b)A相

图2-42 三相SR电动机本体仿真模型
a)三相整体
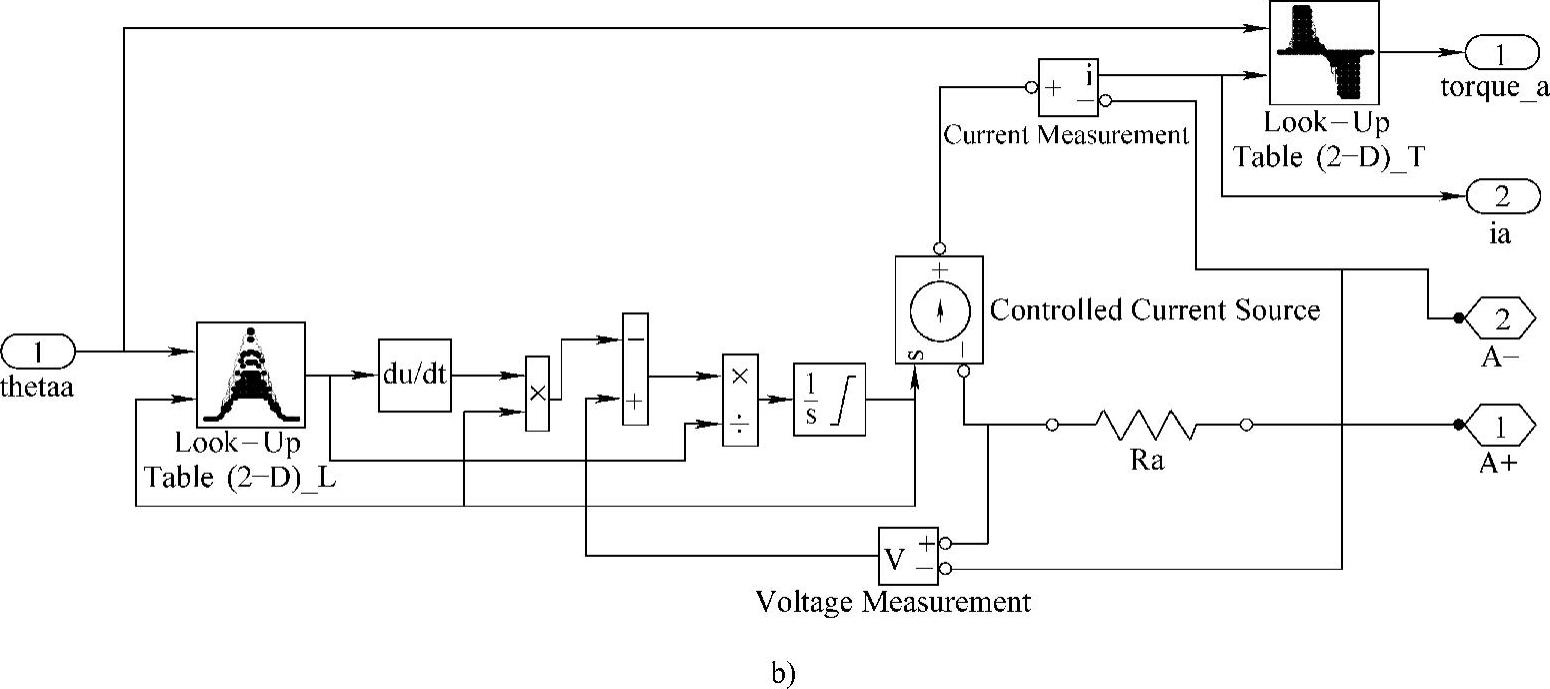
图2-42 三相SR电动机本体仿真模型(续)
b)A相
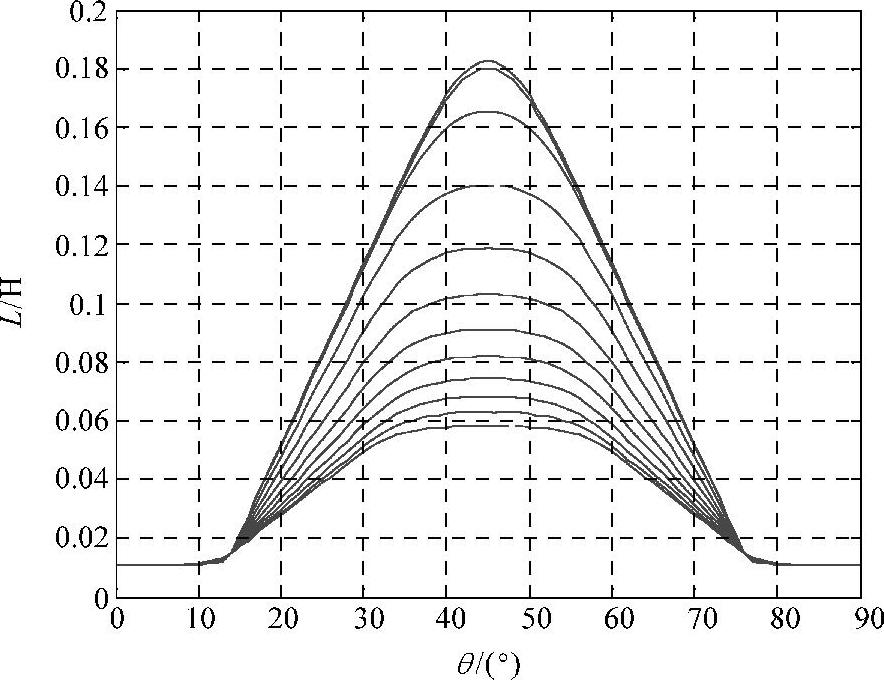
图2-43 样机2的相绕组非线性电感L(θ,i)特性(i从1A至12A,间隔1A)
 (https://www.xing528.com)
(https://www.xing528.com)
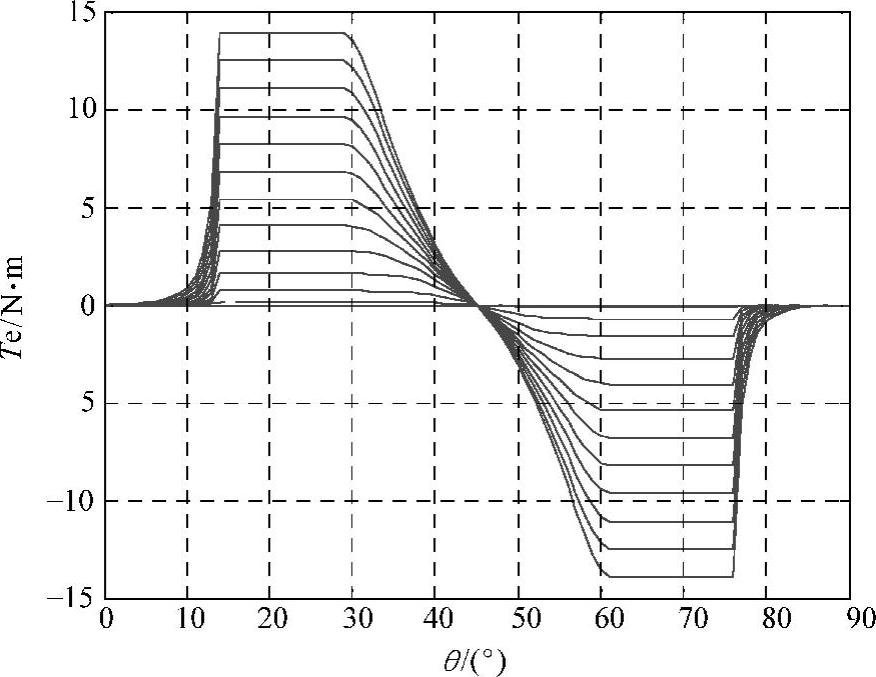
图2-44 样机2的一相电磁转矩T(θ,i)特性(i从1A至12A,间隔1A)
图2-45为位置检测环节的仿真模型。图中,比例环节r2d的作用是将以弧度为单位的输入角位移转换为以度为单位;rem函数实现被除数除以除数(90°)取余数的功能;Switch1~Switch3的功能均为:若2号输入端信号≥0,输出即为2号输入端信号,否则,输出为2号输入端信号与90°之和。图2-45模型的主要功能是将任一瞬时位置映射为转子相对A、B、C三相绕组的位置角PA、PB、PC。因为电动机本体各相绕组建模的表格数据均按0~90°一个转子角周期给出,且考虑到L(θ,i)和T(θ,i)关于角度位置分布的对称性,PA、PB、PC均归算为在[0°,90°]内的值。如当前角位移为40°,则PA=40°,PB=10°,PC=70°(70°处的L(θ,i)、T(θ,i)与-20°处相同)。
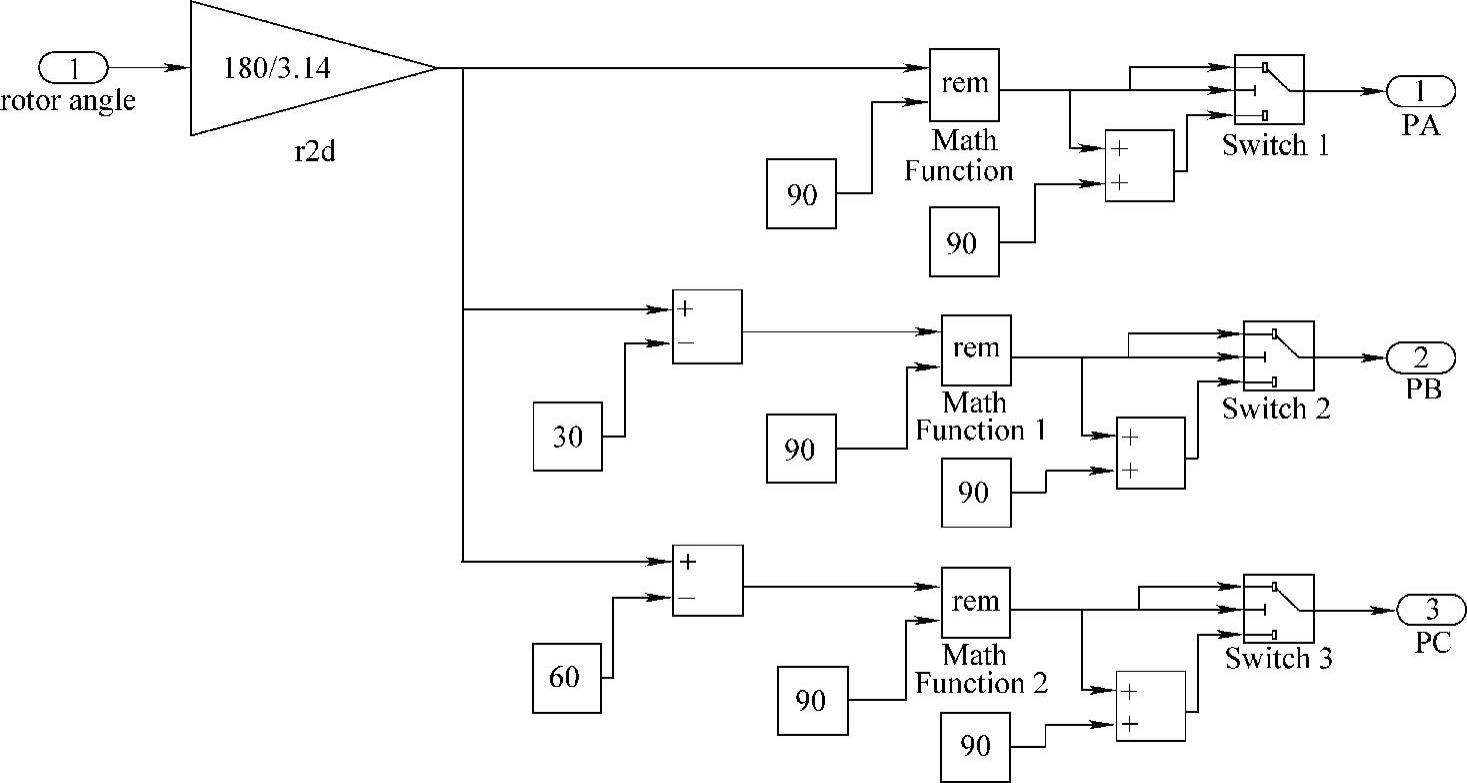
图2-45 样机2转子位置检测仿真模型
图2-46为换相逻辑控制模块的仿真模型,若转子相对于某一相的位置在≥开通角(Switch on Angular)且≤关断角(Switch off Angular)的区间中,该相的导通逻辑控制信号Sk=1(k=A,B,C),否则,Sk=0。在转子位置检测环节,为了插值查表的需要,基于L(θ,i)和T(θ,i)分布的对称性,将PA、PB、PC均归算至[0°,90°]内,当设置的开通角θon<0°时,若直接根据PA、PB、PC决定相应相的导通逻辑,则会出现一段开通盲区。开通角一般至多可提前到θ1处,对样机2而言,θ1=-14°,而当Pk≥90°-θ1时(k=A,B,C),以转子凹槽与该相定子凸极中心线重合处作为参考位置零点,则转子相对该相的位置实际为Pk-90°,为实现这种角度转换,在图2-46中,将Switch1~Switch3切换条件设置为≥76°,且Switch1~Switch3的1号输入端信号为Pk-90°,这样即可根据所设置的开通角、关断角,进行正确的换相逻辑控制。
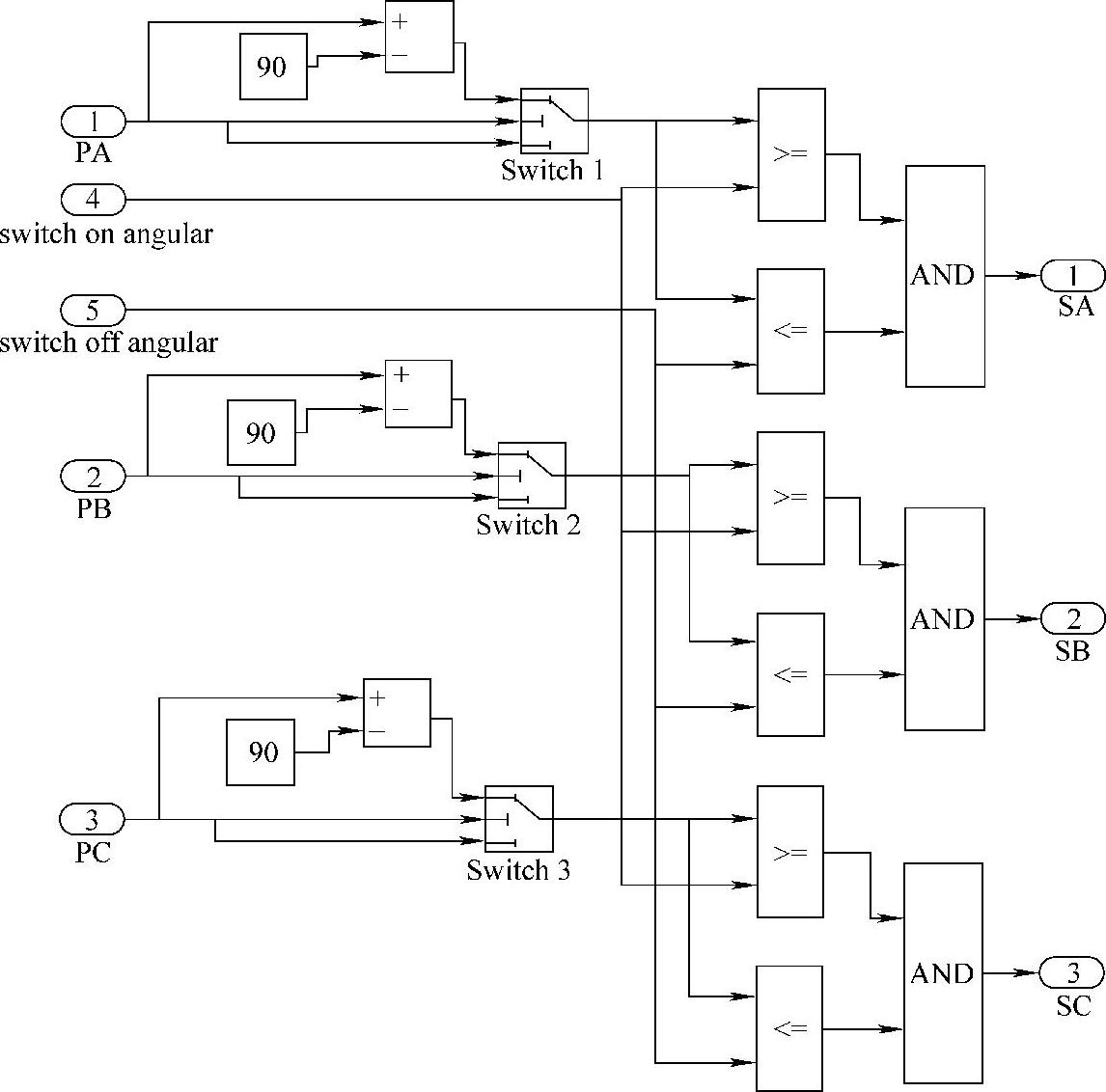
图2-46 样机2换相逻辑控制仿真模型
图2-47为电流斩波控制(CCC)的仿真模型,其根据来自速度调节器输出的电流限幅指令ichop,当某相电流超出ichop+ΔI时,输出关断该相主开关的控制信号(Out_k=0,k=a,b,c);而当相电流低于ichop-ΔI时,则Out_k=1。CCC模块的输出信号Out_k与换相逻辑控制信号Sk经逻辑与运算后,最终作为该相绕组通断的控制信号,并送至功率变换器k相主开关器件的控制极。滞环宽度2ΔI可在Relay1~Relay3中设置,其值越小,越有利于抑制转矩脉动,但开关频率越高,开关损耗越大,对样机2,初步设置ΔI=0.1A。
在建立图2-40所示仿真模型的基础上,可设置给定角速度、负载转矩等参数,进行CCC方式运行仿真,图2-48为在给定角速度62.8rad/s、负载转矩0.1N·m、θon=-4°、θoff=40°下的仿真结果。
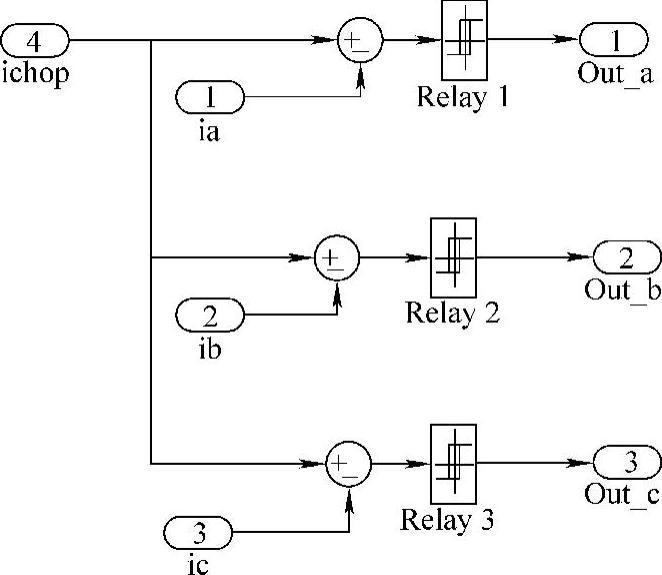
图2-47 CCC仿真模型
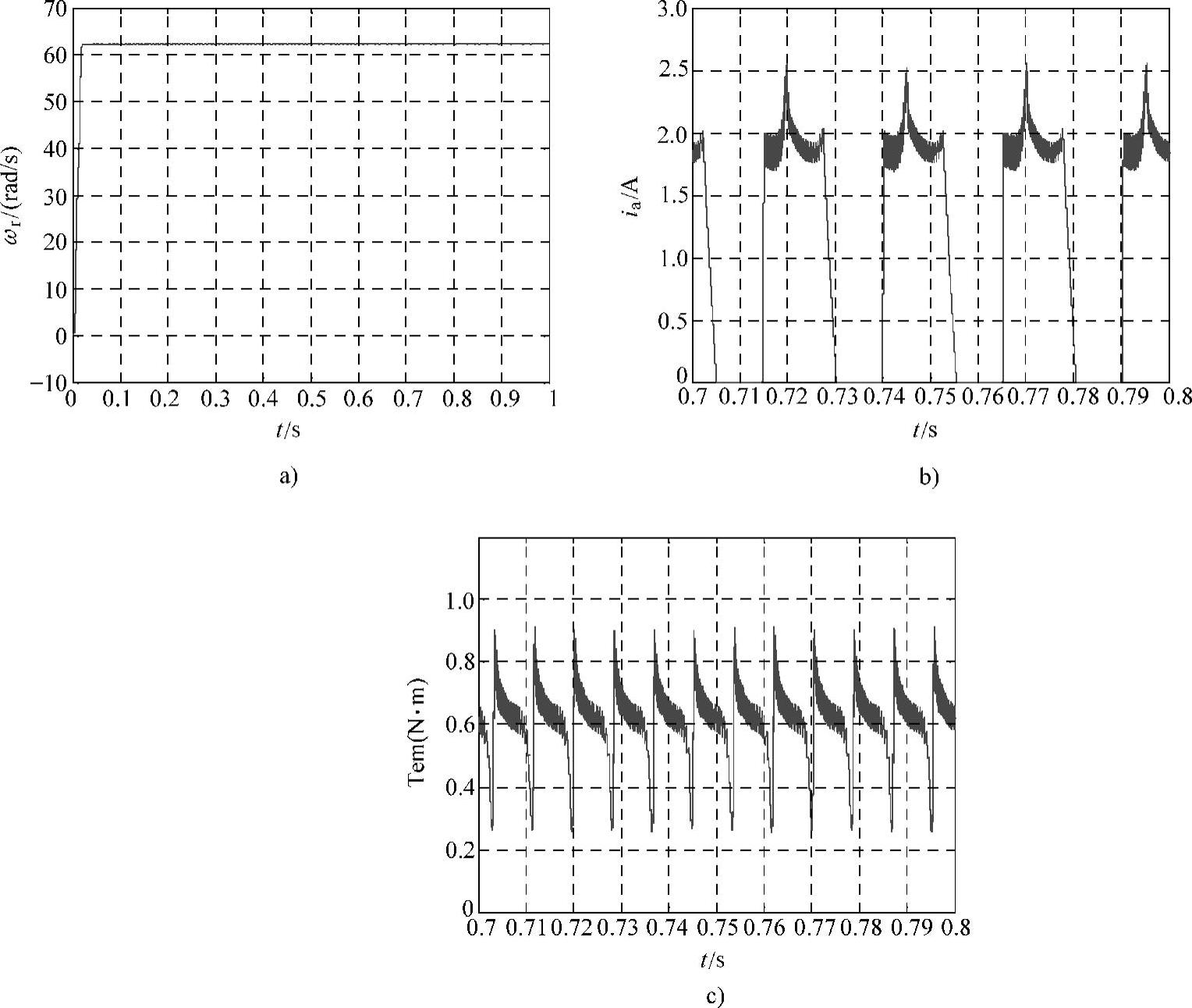
图2-48 样机2在CCC方式下运行仿真结果
a)起动过程及稳态运行角速度 b)稳态相电流 c)稳态合成转矩
将图2-40中的CCC模块用图2-49所示的PWM控制模块取代,并对PID模块略作修改,即得样机2在电压PWM控制方式下的动态仿真模型,这时PID模块输出的是PWM占空比控制参数duty cycle。图2-49中,还包含了限流保护环节,当某相瞬时电流超过Imax(12A)时,则封锁该相的PWM信号。图2-50为样机2在电压PWM控制方式下运行的仿真结果。
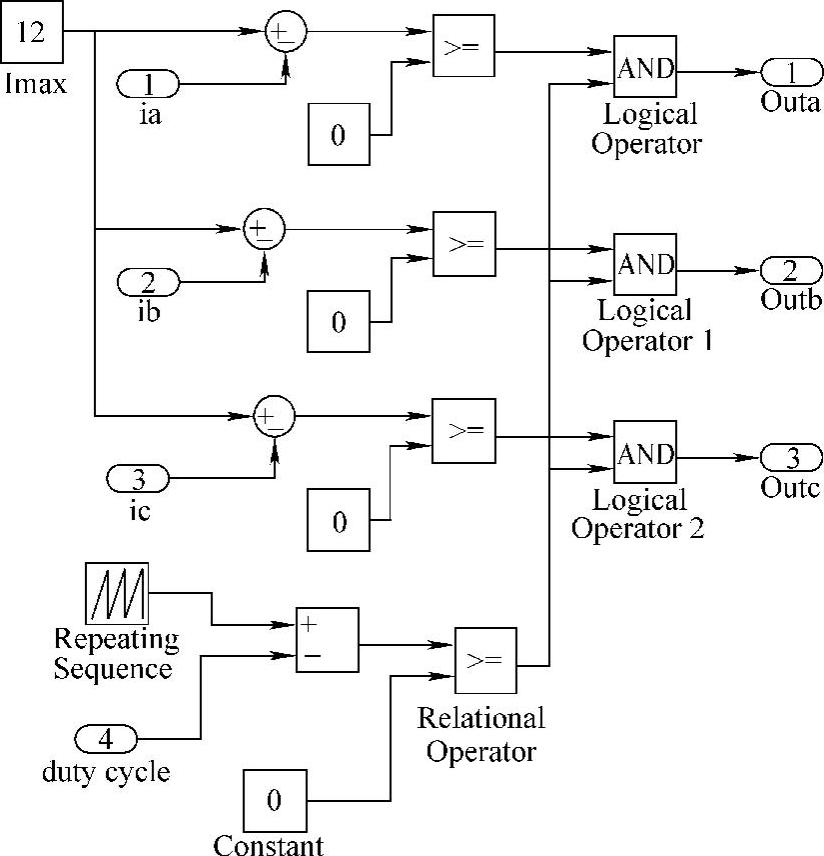
图2-49 PWM控制及限流保护仿真模型
将图2-40中的开通角(Switch on Angular)设置常数改由图2-51所示的PID控制算法产生的Switch on angular取代,并将CCC模块改用图2-52所示的限流模块取代,即得样机2在APC方式(关断角固定,调节开通角)下的动态仿真模型。图2-51中的e为给定角速度与实际角速度之差,PID调节器输出与固定偏置Switch on_0(对样机2设置为14°)之和为饱和环节max_min的输入,饱和环节将Switch on angular(开通角)限制在-14°~30°范围内输出。如图2-52所示,当某相瞬时电流超过Imax(12A)时,则发出关断该相主开关的控制,从而实现过电流保护。图2-53为样机2在APC方式下运行的仿真结果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。