



与步进电动机不同,SR电动机始终工作在有位置反馈的自同步状态,因此不存在步进电动机起动过程中因起动频率过高而引起失步导致起动失败的问题。
SR电动机的起动比较简单,无需辅助设备,研究表明[1,97]:三相或三相以上的SR电动机可在任意转子位置正、反方向起动。SR电动机的优点之一是具有良好的起动性能:起动转矩大,起动电流小,起动时间短。
在起动瞬间,因角速度为零,故无旋转反电动势,若相绕组上加额定电压直接起动,相电流将过大,不仅危及功率变换器的安全,且产生的过大冲击转矩可能损坏传动机构,因此必须在起动期间采用2.5节所述的CCC方式限制起动电流的幅值或采用类似直流PWM调速系统中的软起动技术进行限流。
本节以四相(8/6)SR电动机为例定性分析起动运行的特点。对四相(8/6)SR电动机,有一相绕组通电起动和两相绕组同时通电起动两种起动方式。
1)任一瞬时,只有一相通电起动,每相通电1/4转子角周期。
显然,转子处于不同位置,并且给不同的相通电,起动转矩的大小及方向均不同。为进一步说明这一问题,将各相转子位置角的参考坐标统一取在A相最小电感处,将四相绕组通电的矩角特性画在一起,如图2-30所示。
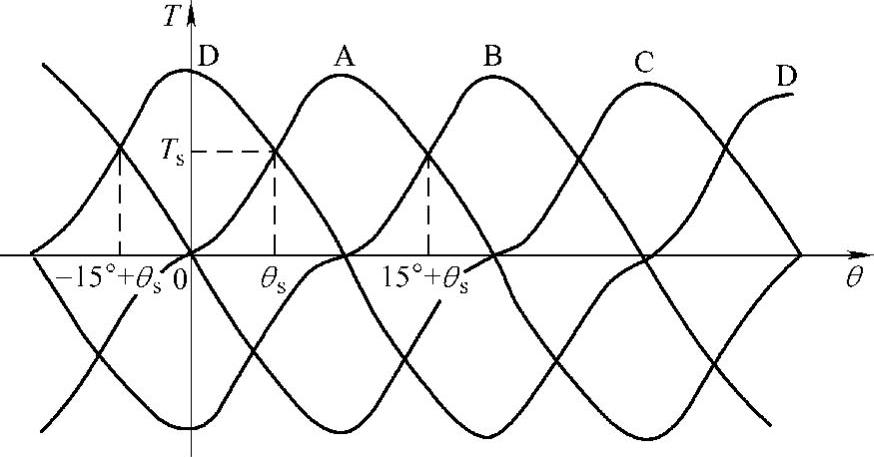
图2-30 四相SR电动机矩角特性
图2-30中,θs为D、A两相转矩曲线的交点位置。显然,为获得尽可能大的起动转矩,当转子位置θ位于-15°+θs这一区域时,应当D相通电起动;而当转子转到θs时,应由D相切换到A相通电起动;当转子又转过一个步进角而位于15°+θs时,则应由A相切换到B相通电;再经一步进角,则切换到C相通电,如此往复循环。即在转子位置由-15°+θs~45°+θs的一个转子角周期(τr=60°)内,SR电动机各相通电起动次序为D→A→B→C,这类似于四相步进电动机单四拍起动运行方式。(https://www.xing528.com)
这种单相起动方式的最小起动转矩为相邻两相矩角曲线交点(θs)处的转矩Ts。只有当Ts大于转轴上的总负载转矩时,才可能在任意位置起动,否则将出现“起动死区”。因此,Ts值的大小代表了单相起动方式带负载起动能力的极限。由图2-30可见,Ts值不仅与起动电流、相邻相绕组矩角特性重叠有关,而且与矩角特性的波形有关。若矩角特性为尖顶,前沿或后沿较平坦,尽管最大静转矩较大,但相邻两相矩角曲线交点处的转矩却不大,故带载起动能力较弱;若为平顶矩角特性,相邻两相矩角曲线交点处的转矩较大,故带负载起动能力较强。
2)任一瞬时,有两相同时通电起动,每相通电1/2转子角周期。
这时,在转子位置0°~60°的一个转子角周期内,SR电动机各相通电次序为DA→AB→BC→CD,类似于步进电动机双四拍起动运行方式。
若不计相绕组间的磁耦合,这种两相同时通电起动方式的合成起动转矩可近似由同时通电相的各矩角特性线性相加求得,如图2-31所示。
显然,两相起动方式的合成转矩最小值为一相转矩的最大值,与单相起动方式相比,带负载起动能力明显较强;而且,两相起动方式的最大起动转矩与最小起动转矩比值减小,故起动过程较平稳;另外,若负载转矩一定,两相起动所需起动电流幅值亦明显较小。
综上所述,两相起动性能优于单相起动性能,所以实用中均采用两相起动方式。
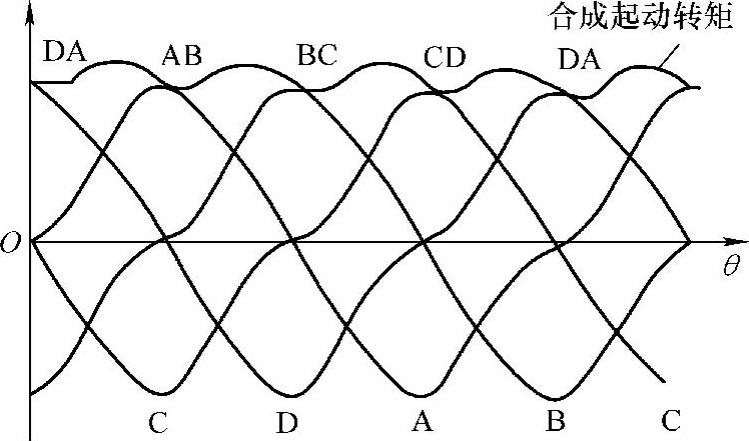
图2-31 两相起动方式的合成起动转矩波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。