



整理式(2-50),得

式(2-52)中的F代表一个繁琐的以电动机结构参数(m、Nr、θ2、Lmax、Lmin)及控制参数(θon、θoff)为自变量的函数式,对给定的电动机,F仅是控制参数的函数。
若Us、θon、θoff恒定,由式(2-52)可得SR电动机的固有机械特性及输出功率分别为

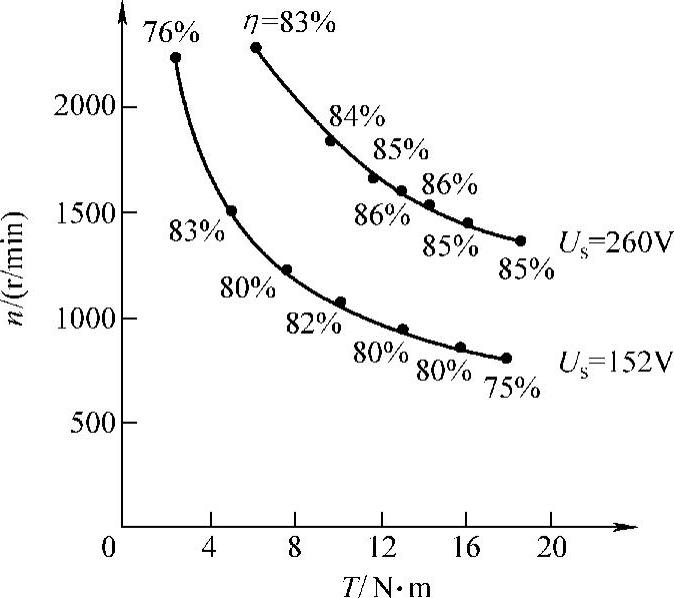
图2-18 SR电动机固有机械特性
可见,SR电动机具有类似于串励直流电动机的固有特性,对于不同的Us,将对应不同的Tav-ωr机械特性。作为示例,图2-18给出某四相(8/6极)2.2kW SR电动机在θon、θoff分别固定为3°、18°,对应于不同Us的机械特性(曲线上各点的数值为系统的效率),其形状类似于串励直流电动机的软机械特性。该特性曲线的上限对应于最高额定电压Usmax。对结构参数已确定的SR电动机,存在一个临界角速度ωb,其对应于Usmax下的最大磁链Ψmax和最大电流ip,ωb在参考文献[1]中被称为“基速(Base Speed)”,其是SR电动机能得到最大电磁转矩时的最高角速度,即能得到最大输出功率的最低角速度。
下面就多数传动装置所需的一种典型转矩-转速特性——从静止到基速具有恒转矩特性,在基速以上输出恒功率特性来研究SR电动机的两种基本控制策略。
1)基速ωb以下,电流斩波控制(Chopped Current Control,CCC),输出恒转矩特性。
由式(2-47)、式(2-48)可知,Ψmax及ip随角速度ωr的降低而增大,因此当SR电动机在基速以下运行时,应调节Us、θon、θoff这三个可控变量,使Ψmax及ip不超过允许值。若要在0~ωb内获得恒转矩特性,则可固定θon、θoff,通过斩波控制相绕组的励磁电压来达到。具体实现方法有两种。其一,如2.3.3节所述,用电流的限值来控制Us加在导通相上的有效时间,改变限流幅值的大小,即可控制输出转矩变化,此法即为通常意义上的电流斩波控制(CCC),亦称为电流PWM控制;其二,用控制信号(如速度给定和实际速度之差经调节器后的输出信号)调制Us加在导通相上的有效时间宽度来改变励磁电压的平均值,进而改变转矩,此法亦称为电压PWM控制。
式(2-52)表明,ωr与励磁电压成正比,而式(2-17)、式(2-20)、式(2-34)表明,Ψ(θ)、i(θ)则正比于励磁电压与ωr之比,因此当θon、θoff固定,且负载转矩一定时,调节励磁电压,ωr将随之变化,而Ψ(θ)、i(θ)波形的形状基本保持不变,只是频率发生变化。由此可见,斩波调速控制可使SR电动机在基速以下运行时的输出转矩基本上为常数,同时磁通基本保持不变,属于“恒转矩调速”性质。
2)基速ωb以上,角度位置控制(Angular Position Control,APC),输出恒功率特性。
由式(2-17)、式(2-20)、式(2-34)及式(2-52)可知,在Us、θon、θoff一定时,随ωr增加,Ψ或i将以ωr-1下降,Tav则“自然”地以ωr-2下降,但这种自然降落可通过按比例地增大导通角θc=θoff-θon来补偿,这样可控制导通时间不以ωr-1下降,若做到使磁通以ωr-1/2下降,则转矩将受控制地随ωr-1下降,即可在一个较宽的速度范围内得到恒功率输出特性。(https://www.xing528.com)
图2-19为不同运行方式下实测的SR电动机相电流典型波形。
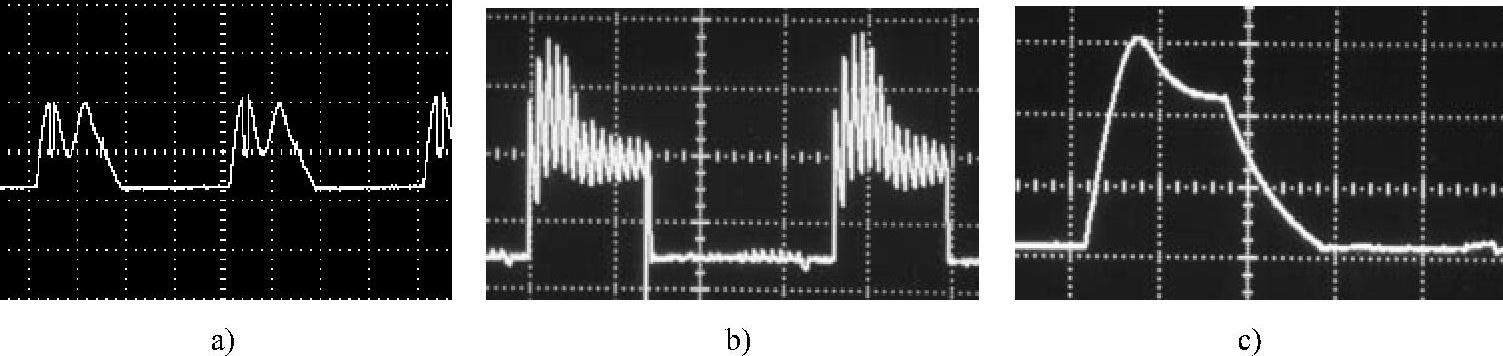
图2-19 不同控制方式下,实测的相电流波形
a)CCC方式 b)电压PWM方式 c)APC方式
由式(2-52)可知,采用APC调速方式时,对于给定的负载特性,其转速取决于θon、θoff。θon、θoff无解析解,但可用图解法确定,如图2-20所示。
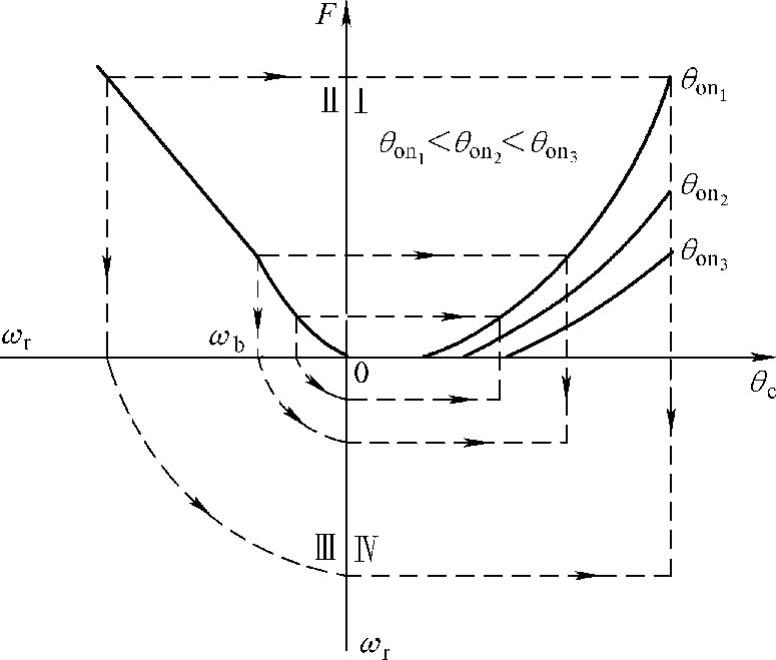
图2-20 APC方式图解[63]
图2-20中,象限Ⅰ中的F(已知一定几何尺寸的SR电动机)是在不同的开通角θon下相对于导通角θc(=θoff-θon)画出的;象限Ⅱ中是针对ωb以下恒转矩、ωb以上恒功率的负载转矩/转速特性依式(2-52)画出的F相对ωr的曲线。在象限Ⅳ中,纵轴为ωr,横轴为θc,由式(2-18)可知,Ψmax正比于θc/ωr,因此在象限Ⅳ中,任一点的横坐标与纵坐标之比正比于Ψmax。
在象限Ⅱ中,选择曲线上一点(即给定负载的某一运行转速点),由该点至象限Ⅰ作水平线,由该水平线与象限Ⅰ中F曲线的交点即可确定可能的θon、θoff组合,进而确定象限Ⅳ中与这一开关角组合及运行速度相对应的Ψmax。由图2-20可见,在基速ωb(恒转矩区的最高转速)以下,Ψmax随着ωr的下降而上升;而在ωb以上的恒功率区,Ψmax则随ωr的上升而下降,因此SR电动机的APC方式类似于直流电动机中减弱磁场的控制,基本上属于“恒功率调速”。
然而,导通角的增大是有限制的,一般不能超过τr/2,即Us=Usmax、θc=θcmax=τr/2=π/Nr所对应的运行角速度ωsc是APC方式的上限,若SR电动机超过ωsc运行时,由于θon、θoff已调到极限值,没有进一步调节的余地,这时SR电动机将回复到对应于θc=τr/2时的固有机械特性上运行,转矩不再随转速的一次方下降,而是与转速的二次方成反比,即呈串励特性运行,如图2-21所示。
在参考文献[11]中,将ωb(最大功率下的最低转速)和ωsc(最大功率下的最高转速)分别冠以“第一临界转速”和“第二临界转速”。显然,控制变量(Us、θon、θoff)的不同组合,两个临界点在速度轴上将对应不同的分布,并且在上述两个区域内分别采用不同的控制方法,便能得到满足不同需求的机械特性,这充分说明SR电动机具有十分优良的调速控制性能。
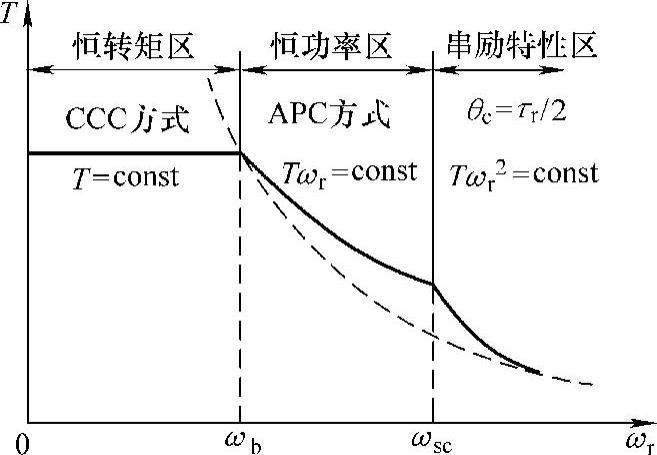
图2-21 SR电动机调速的控制特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。