



为推导简单起见,忽略所有功率损耗,假设主开关器件的切换是瞬时的,角速度ωr恒定,且忽略互感磁链,这样各相绕组的作用可分别讨论。
SR电动机每转一圈,每相导通的单向电流脉冲数与转子极数Nr相同,故m相电动机每转对应mNr个脉冲,即运动mNr步。实际电流脉冲的形状随转矩、转速而变,为进一步简化分析,假设相电流为理想的平顶波电流,如图2-15所示。基于图2-13b所示的准线性模型的分段线性化磁化曲线,随图2-15所示的平顶波相电流变化,一相绕组对应磁链变化轨迹如图2-16所示。
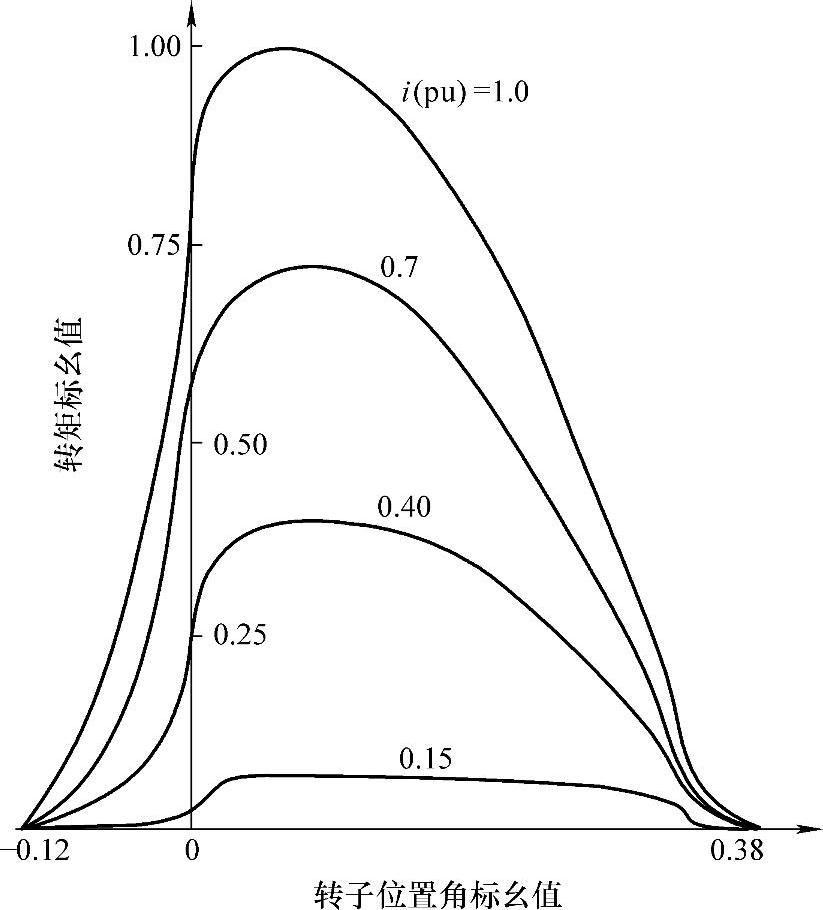
图2-14 瞬时转矩随转子位置角、相电流变化曲线[1]
图2-16是基于如下假设作出的:
1)设当定子极与转子槽重叠时具有最小电感Lmin,且为常数,所以对应电流由O点线性上升至A点,磁链Ψ由O点沿斜率Lmin的直线线性上升至A点;
2)设当定、转子凸极中心线重合处的起始磁化曲线以Lmax的斜率线性上升至D′点,当i>i1后,则以Lmin的斜率变化,即 平行于
平行于 ;
;
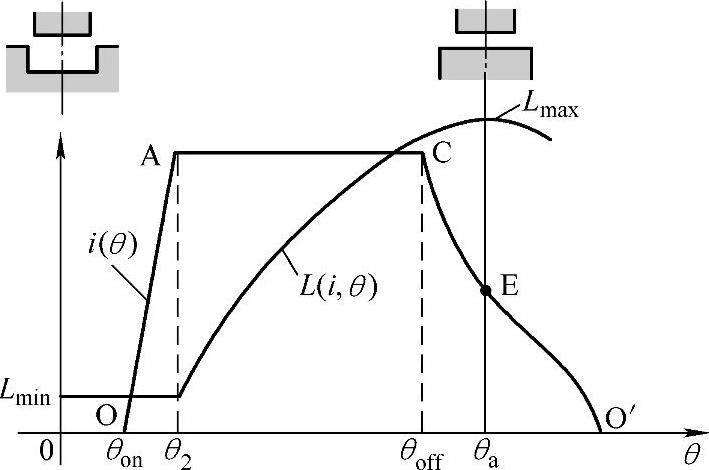
图2-15 SR电动机平顶波相电流(OACEO′)及电感曲线
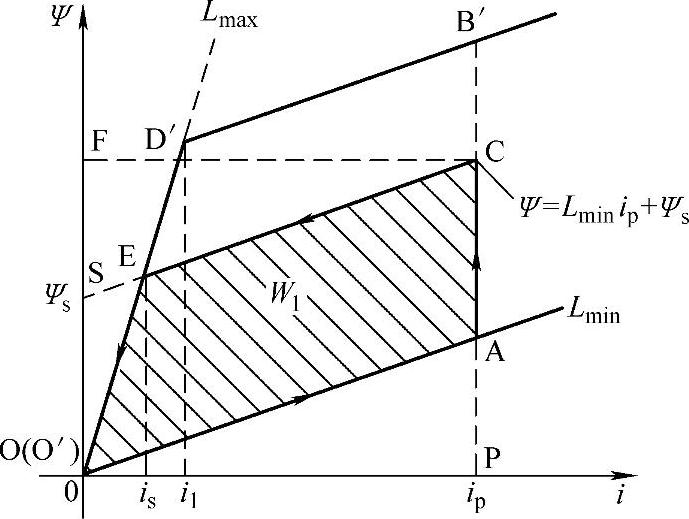
图2-16 SR电动机一相磁链-电流特性(OD′B′对应θa位置,OA对应定子极与转子槽重叠区域)
3)平顶电流结束时,工作点移至C点,该点即为换相点。换相开始后,电流逐渐下降,工作点沿斜率为Lmin的直线 下降至定、转子凸极中心线重合处的E点,E点的储能(三角形SEO面积)较C点(换相点)的储能小得多,且E点的电流is<i1,故可近似认为在进入电感下降区前电流已衰减至零,在E点后,随着续流电流的衰减,Ψ将沿着斜率为Lmax的直线
下降至定、转子凸极中心线重合处的E点,E点的储能(三角形SEO面积)较C点(换相点)的储能小得多,且E点的电流is<i1,故可近似认为在进入电感下降区前电流已衰减至零,在E点后,随着续流电流的衰减,Ψ将沿着斜率为Lmax的直线 下降至零。
下降至零。
由机电能量转换原理可知,SR电动机每相在一个工作周期(转子角周期τr=2π/Nr)中的磁共能增量(即转变成机械功输出的有效电磁能量)W1为电流变化一个周期内,Ψ/i平面各工作点所围闭合曲线的面积,即图2-16中有斜线的面积SOACEO。若不计电阻损耗,则m相SR电动机的总平均电磁转矩为

已知电感参数、平顶波电流幅值ip及外施直流电压Us,即可解析计算面积W1,由图2-16,得

式中,SOACFO为换相点C前,相绕组所接受的电源供能;SOECFO为换相后续流阶段绕组回馈给电源的能量。

又 ∵SOECFO=S△CFS+S△SEO
由图中几何关系,有
 (https://www.xing528.com)
(https://www.xing528.com)
又 ∵Ψs=(Lmax-Lmin)is

由式(2-43)、式(2-44),得

将式(2-41)、式(2-42)和式(2-45)代入式(2-40),得

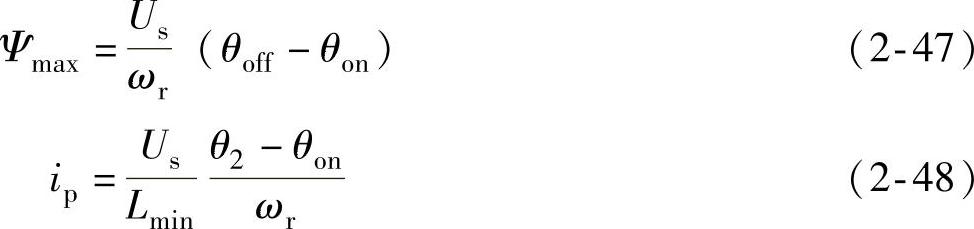
由式(2-17)、式(2-24)可分别求得Ψmax、ip,即有
将式(2-47)、式(2-48)代入式(2-46),得

将式(2-49)代入式(2-39),即得m相SR电动机的总平均电磁转矩解析式为

若不计空载损耗,m相SR电动机的输出功率为

由式(2-50)可定性说明SR电动机的基本转矩特性及其随各种参数而变的趋势:
1)Lmax/Lmin值越大,每一工作周期内所能获得的有效电磁能量W1的最大值亦越大,电磁转矩亦越大,这一点在第3章中将进一步讨论。应该指出,在式(2-50)中,是以Lmax和Lmin之差影响电磁转矩的,当Lmax/Lmin值已经较大时,再增大Lmax/Lmin,Tav的增大并不显著,而要进一步提高Lmax/Lmin值,在技术、经济上均要付出代价。因此,在SR电动机设计中,通常以选Lmax/Lmin=6较为合适。
2)在角速度ωr一定时,若开通角θon较小时,相电流在最小电感区域上升的时间(θ2-θon)/ωr较长,从而增大进入有效工作区的电流,提高输出转矩,因此θon是控制电磁转矩的重要参数。在θon一定时,增大关断角θoff,W1增大,则平均转矩相应增大。但关断角θoff有一最佳值,超过此值后,随θoff增大,Tav反而减小。实际上,θoff的增大,不仅使dL/dθ>0的有效工作区域内的平均电流增加,从而导致电动转矩增大,但同时亦有可能使流过dL/dθ<0区域的平均电流增加,从而引起制动转矩增加。因此,θoff必有一个最佳值,当关断角大于该值,制动转矩的增值超过电动转矩的增值,平均转矩开始下降。
图2-17给出SR电动机的平均电磁转矩Tav随 、
、 变化的实例,其中,
变化的实例,其中, 、
、 均用以转子角周期τr作为基值的标幺值表示。
均用以转子角周期τr作为基值的标幺值表示。
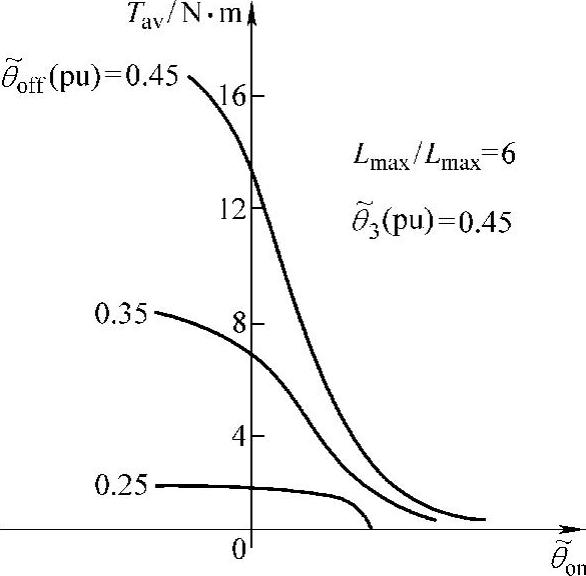
图2-17 平均电磁转矩随开通角、关断角变化
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。