



1820年,丹麦物理学家奥斯特(H.C.Oersted)发现电流的磁效应,率先揭示了电与磁的联系。法国数学家、化学家、物理学家安培(A.M.Ampere)在19世纪20年代建立了载流导体在磁场中受力的安培定律,英国物理学家、化学家法拉第(Michael Faraday)在1831年建立了揭示“变磁生电”的电磁感应定律。安培公式指出电流元Idl在磁感应强度为B的外磁场中所受到的电磁力df为
df=Idl×B (1-1)
法拉第电磁感应定律指出,导体回路中感应电动势E与穿过回路的磁通量Φ对时间的变化率成正比,即

安培定律和法拉第定律为电机制造奠定了理论基础。与电场比较,磁场较易获得高的储能密度,故电机一般应用磁场为媒介实现机电能量转换,通常“电机”只是“电磁机”的简称。事实上,电机正是通过与电机绕组交链的磁通发生变化产生感应电动势实现对电系统的作用(发电机)或反作用(电动机),通过载流电枢导体在磁场中受电磁力实现对机械系统的作用(电动机)或反作用(发电机),气隙磁场是联系电机机械系统和电系统实现电能和机械能相互转换的纽带,如图1-1所示。
图1-1中,导体ab处于磁感应强度为B的磁场中,磁力线垂直纸面向里,U为导体端电压,I为导体的电流,E为导体感应电动势,v为导体运动速度,Fem、FJ分别为导体所受的电磁力、机械力。图1-1a中,在外施电压U作用下,导体流过电流I,在磁场中产生Fem(动力)与FJ(阻力)平衡,导体以v匀速电动运行,切割磁力线产生反作用于电系统的反电动势E,输入的电功率(UI)扣除导体损耗后即为转换为机械功率(Femv)的电磁功率(EI)。图1-1b中,在外施机械力FJ(动力)作用下,导体切割磁力线而产生作用于电系统的电动势E并流过感应电流I,在磁场中产生反作用于机械系统的电磁力Fem(制动力)与FJ平衡,导体以v匀速发电运行,输入的机械功率(FJv)近似为转换为电功率的电磁功率(EI)。
从1884、1885年直流电动机、笼型异步电动机分别问世起,电机学科的发展已有一百多年的历史。按传统的分类方法,常用旋转电机分为直流电机和交流电机两大类,而交流电机又分为异步电机和同步电机。
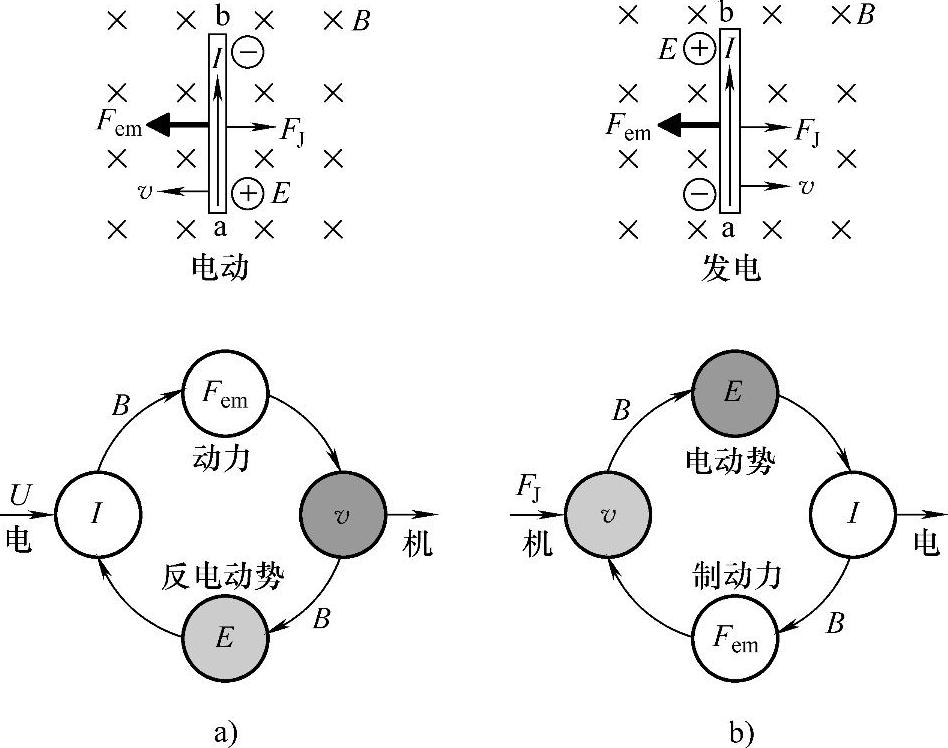
图1-1 电动运行与发电运行
a)导体电动 b)导体发电
众所周知,交流电动机的定子磁场是旋转磁场,异步电动机的转子转速与旋转磁场的同步转速之间总存在转差,而同步电动机的转子转速则是与定子电源频率(旋转磁场)严格同步的转速。
直流电动机的定子磁场是静止的,为了使转子受到方向不变的电磁转矩以连续旋转,其借助电刷与换向器的配合将外加直流电源提供的直流电流“逆变”成方向交变的交流电通入转子绕组,以使在同一磁极下转子绕组有效导体边流过同一方向的电流,定、转子磁场保持相对静止,从而转子所受定子磁场的平均转矩不为零;另一方面,转子绕组在旋转中,其任一有效导体边交替切割不同极性的磁极,产生的动生电动势方向本是交变的,借助电刷与换向器的配合才将转子绕组的交流电动势“整流”成了电刷两端的直流电动势。因此,直流电动机本质上是装有机械换向装置的交流电动机,而从其电枢绕组可等效为与静止定子磁场无相对运动的“伪静止绕组”这一特点看,直流电动机也可视为一种特殊的同步电动机。(https://www.xing528.com)
虽然,笼型异步电动机只较直流电动机晚一年问世,但直到20世纪70年代,在需要宽范围、高要求的电气调速传动领域中,大多用直流电动机,19世纪90年代开发并使用的Ward-Leonard系统[即直流发电机-电动机系统,如今已演变为晶闸管-直流电动机(SCR[1]-M)系统、PWM直流调速系统]长期以来主导了调速传动领域。这是因为直流电动机为“双边励磁”,电枢绕组的电流Ia是由外接电源提供的,加上一定补偿后,可忽略电枢反应对主磁场的去磁作用,则气隙磁通Φ可近似认为由定子励磁电流If决定,而直流电动机的电磁转矩为
T=CTΦIa (1-3)
由于直流电动机的电枢电流Ia和定子励磁电流If对电磁转矩控制具有天然的“解耦性”,因此直流电动机的电磁转矩具有优良的控制特性,只要独立调节电枢电流Ia或定子励磁电流If,即可准确调节其电磁转矩,从而在宽广的范围内实现高性能调速。但异步电动机为“单边励磁”,转子电流I2为感应电流,其电磁转矩与气隙磁通Φm和转子归算电流的有功分量I′2cosφ2成正比,即

式(1-4)从形式上虽与式(1-3)相似,但建立气隙磁通Φm所需的励磁电流I0和转子电流I2均来源于定子电流I1,I0和I2不具备“解耦性”,其受如下相量方程约束:

异步电动机实际运行中能直接控制的只是定子电压(电流)、定子频率,但电磁转矩与其并不存在简洁的函数关系,故在动态过程中,异步电动机电磁转矩的准确、有效控制较直流电动机困难得多。
然而,直流电动机的机械换向装置导致固有的换向问题,使其功率、速度及应用环境受限,因此采用无换向器的交流电动机实现电气传动向高电压、高速、大功率方向发展是电气传动界不懈的追求。自20世纪50年代硅晶闸管(SCR)问世以来,随着电力电子技术的进步,基于电力电子变换器(也常称为功率变换器)的交流调速系统发展迅速,形成了“电子控制电机”这一电机学科新兴的发展方向。事实上,基于日新月异的电力电子技术、微机技术、自动控制理论,电气传动界开展了大量卓有成效的交流调速系统的研究和开发工作,如异步电动机的变压变频(VVVF)控制、矢量控制、直接转矩控制;同步电动机他控式、自控式变频调速系统。目前,交流调速系统已取代了直流调速系统在调速领域的主导地位。
起源于20世纪60年代的永磁无刷电动机开创了电子控制电机的先河。永磁无刷电动机是将传统永磁直流电动机反装构成永磁同步电动机本体,并采用电力电子逆变器、位置检测器取代直流电动机机械换向片、电刷,但工作原理、机械特性、转矩特性均与直流电动机相仿的一类“自控变频同步电动机”。根据驱动电流波形、反电动势波形、控制方式不同,永磁无刷电动机分为方波电流驱动的无刷直流电动机(BLDCM)、正弦波电流驱动的“正弦波永磁同步电动机(PMSM)”。在大、中功率的应用中,同步电动机的转子通常采用独立直流励磁,这时由电力电子逆变器取代机械式换向装置构成的同步电动机调速系统一般称为“无换向器电动机”。目前,学术界趋于将“无换向器电动机”和永磁无刷电动机统称为“自控变频同步电动机”,以揭示其逆变器频率并非独立控制,而是受控于转子位置信息,使其频率和同步电动机的转速能始终保持同步的共同本质。
正是在交流调速技术蓬勃发展的20世纪80年代,一种起源于英国Leeds大学和Nottingham大学的新型交流调速电动机——开关磁阻电动机(Switched Reluc-tance Motor,简称SR电动机)正式得到国际承认[1]。因SR电动机结构简单、坚固,工作可靠,效率高,由其构成的调速系统——开关磁阻电动机调速系统(Switched Reluctance Motor Drive,SRD)兼有传统交直流调速系统的优点,故在交流调速领域异军突起,成为当代电气传动领域的热门课题之一。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。