



【摘要】:编写离线程序的最终目的是在线应用,在线使用离线程序面临的主要问题是安装误差对程序精度的影响。图5-70 离线程序的生成过程图5-70 离线程序的生成过程图5-71 运动时间显示综上所述,借助离线编程技术,可以在软件环境中合理分配工艺、模拟焊钳选型和站内布局、优化焊接顺序和干涉区设置、预测生产节拍等,通过离线编程技术将技术难题解决在现场调试之前,使整个项目的各个环节得以并行开展。
编写离线程序的最终目的是在线应用,在线使用离线程序面临的主要问题是安装误差对程序精度的影响。现场安装与图样一致时,离线程序可以直接使用。如果现场机器人与工具的相对位置和安装图样差距较大,离线程序不能直接使用,需要找出安装误差的数值,以此对点焊程序进行平移校准,对平移校准后的程序进行微调后即可使用。
在线使用离线程序最大的优点在于离线编程的整体规划性。在整体上把握点焊机器人的路径、姿态和干涉区之后,可以提高示教质量,节约现场示教时间,提高示教的工作效率。据统计,使用离线程序示教,与以往现场示教相比,平均节约80%的示教时间。
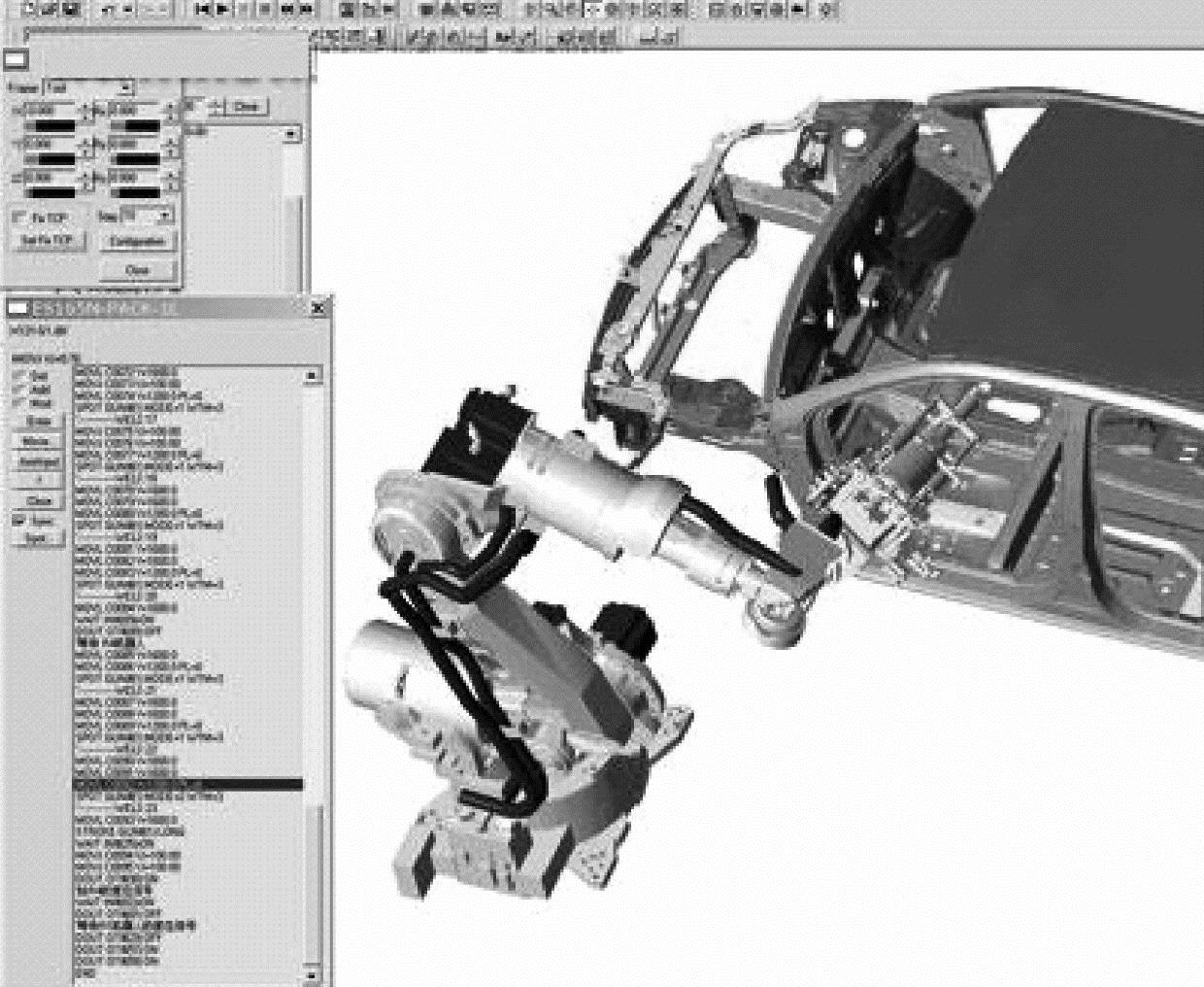
图5-70 离线程序的生成过程
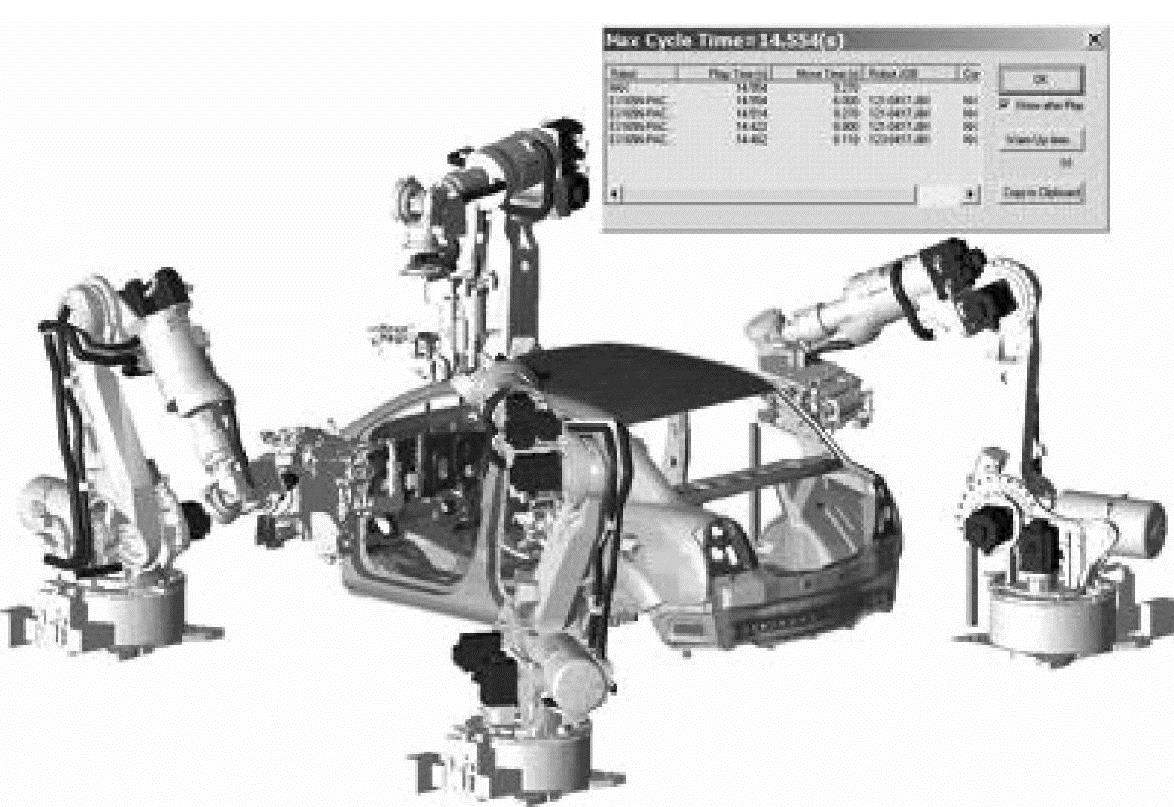
图5-71 运动时间显示
综上所述,借助离线编程技术,可以在软件环境中合理分配工艺、模拟焊钳选型和站内布局、优化焊接顺序和干涉区设置、预测生产节拍等,通过离线编程技术将技术难题解决在现场调试之前,使整个项目的各个环节得以并行开展。现场只需将离线程序进行微调和再现验证便可投入使用。克服了现场示教编程大量占用调试时间的不足,使程序得以规范化,提高了现场的调试速度和针对客户需求的响应速度,也提高了项目质量。(https://www.xing528.com)
思考题
1.举例说明焊接节拍与产能计算。
2.简述机器人柔性生产线的特点。
3.为什么要设定机器人干涉区域?
4.中频焊接相比较工频焊接有哪些特点和优势?
5.简述伺服点焊钳的特点和功能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。