



1.产品信息
1)产品名称:电梯层门。
2)产品图示及规格:电梯层门工件,如图5-50所示。
工件数据及焊点:长为625mm,宽为40mm,高为2016mm,毛重为15.6kg,焊点数为8个。

图5-50 电梯层门
2.现场环境信息
使用温度:5~45℃;环境湿度:<95%;电源电压:380V/220V±10%,50Hz;压缩空气源:0.50~0.7MPa;冷却水:流量为12L/min,压力为0.2~0.4MPa,温度为5~20℃。
3.系统布局图
1)系统空间尺寸:长8000mm,宽5500mm,高3500mm。系统布局三维视图如图5-51所示。

图5-51 系统布局三维视图
2)系统主视图如图5-52所示。
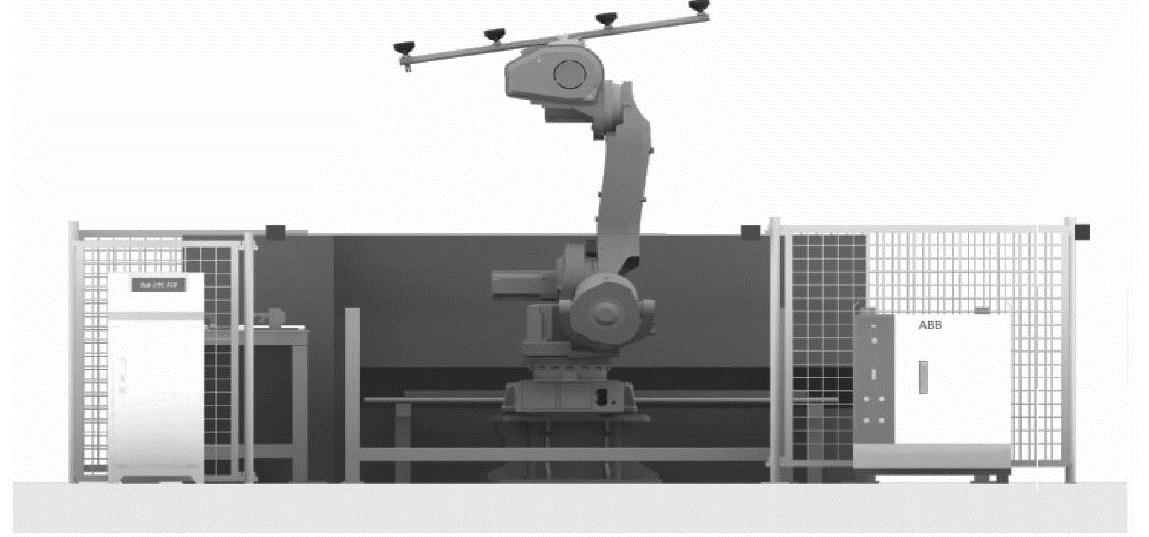
图5-52 系统主视图
3)系统俯视图,如图5-53所示(参见配套光盘视频-(29)单机器人配两种执行机构)。
4.系统构成
系统由一台工业机器人(一台机器人带两套执行机构)、一套C型气动点焊钳、一套真空吸盘抓件夹具、一套气动夹具、一套点焊变压器、一套点焊控制器、一套冷水机、一套点焊线缆包、一套机器人与PLC接口、一套敞开式围栏及电气控制系统构成。机器人系统在制作方案和设计时,先在计算机上进行三维仿真模拟,以保证焊点的可达位置及机器人的工作节拍分析。
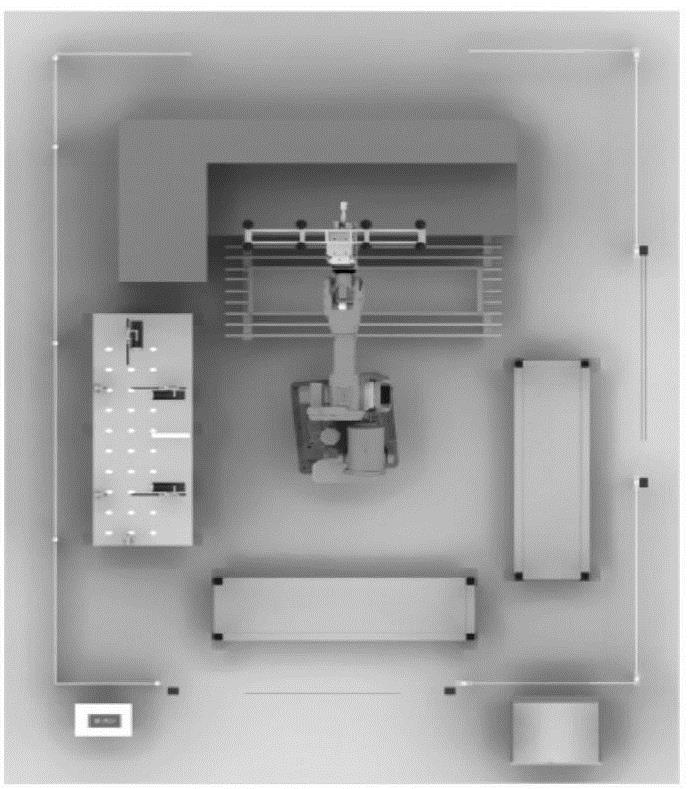
图5-53 系统俯视图
5.设计及模拟
(1)设计 需方(生产使用方)提供工件的3D模型和2D图样,由供方(设备制造方)负责机器人工位的模拟设计工作。
(2)模拟
1)机器人选型及安装位置确定。
2)机器人焊钳选型。
3)抓具模拟仿真。(https://www.xing528.com)
4)机器人焊点可达性和工作路径验证,模拟确认机器人运动过程中是否有碰撞产生,是否需要修改夹具的设计。
5)虚拟编制机器人工作程序。
6)机器人节拍验证。
6.工作现场及水、电、气要求
1)需方负责提供设备必需的水、电、气。
2)车间工作温度:0~40℃。
3)湿度:≤90%(不结露)。
4)电源:AC 380V±10%,50Hz。
5)压缩空气压力:0.4~0.6MPa。
6)循环冷却水压力:(3.0±0.5)MPa。
7.气源工作界面
气源工作界面中,连接机器人设备的气源过滤减压部分由制造商负责,气源及管道部分由用户负责,如图5-54所示。
8.水源工作界面
焊接设备所需冷却水(净化水或蒸馏水),由需方(用户)负责。
9.电源工作界面
动力电部分(通常为交流380V,50Hz)由需方负责,如图5-55所示。
10.与机器人安装有关的土建参数
地基要求达到的机器人正常运行负载和机器人急停最大负载要求见表5-14。
表5-14 机器人正常运行负载和机器人急停最大负载要求
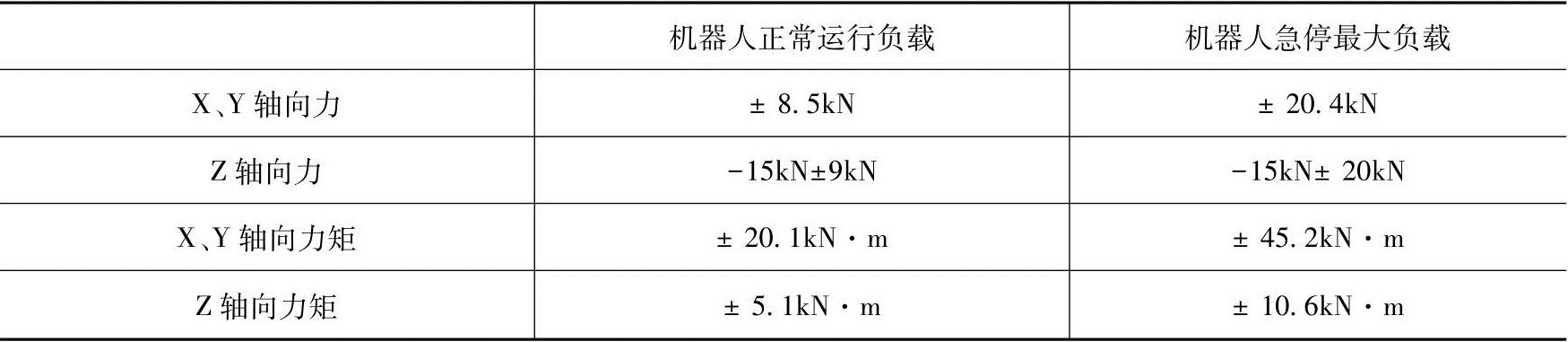

图5-54 气源工作界面

图5-55 电源工作界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。