



【摘要】:对应于伺服焊钳的特点,机器人有很多辅助功能,对机器人的焊接质量、工作效率及示教工作的方便性都有很大的进步。图5-39 自动补偿焊钳电动机的转矩3.电极粘着检出功能目的 电极与工件发生粘着时,假如没有“电极粘着检出功能”,可能会造成焊钳电极或工件的损坏,如图5-40所示。
对应于伺服焊钳的特点,机器人有很多辅助功能,对机器人的焊接质量、工作效率及示教工作的方便性都有很大的进步。
1.间隙示教
(1)目的 分别设定上电极和下电极的间隙值,在打点位置进行示教并登录,上下电极分别按间隙值自动偏移并自动登录位置点,这样每示教一个焊点就可以少示教两个点,示教起来简单方便。
(2)功能 分别按设定的间隙偏移后自动登录位置,从而实现位置的登录,如图5-38所示。
2.根据焊钳姿态加压补偿功能
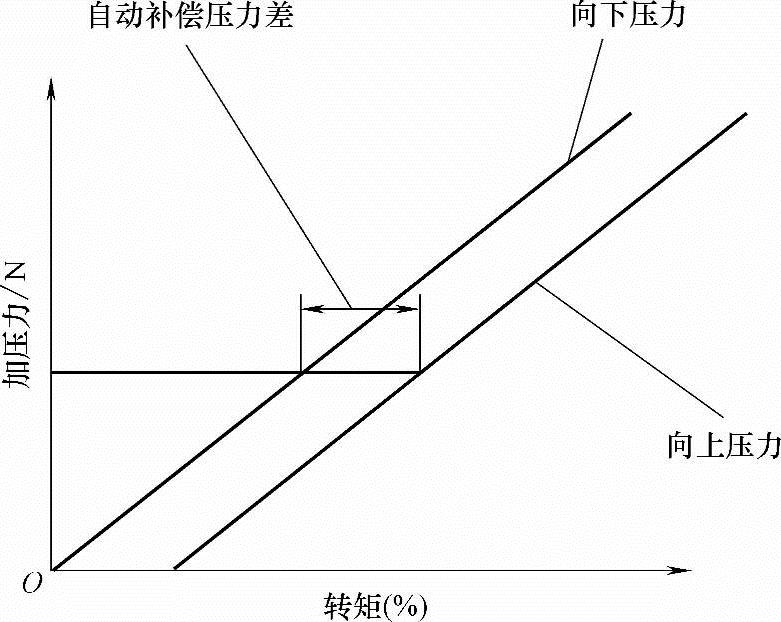
(1)目的 根据焊接时焊钳的姿态对加压力的变化实现补偿,可以在稳定的加压力条件下进行点焊。
(2)功能 先测定向上加压与向下加压时的压力差,再计算出与重力方向相反的焊钳焊接姿态时的加压力差,自动补偿焊钳电动机的转矩,如图5-39所示。

图5-38 自动登录位置
 (https://www.xing528.com)
(https://www.xing528.com)
图5-39 自动补偿焊钳电动机的转矩
3.电极粘着检出功能
(1)目的 电极与工件发生粘着时,假如没有“电极粘着检出功能”,可能会造成焊钳电极或工件的损坏,如图5-40所示。
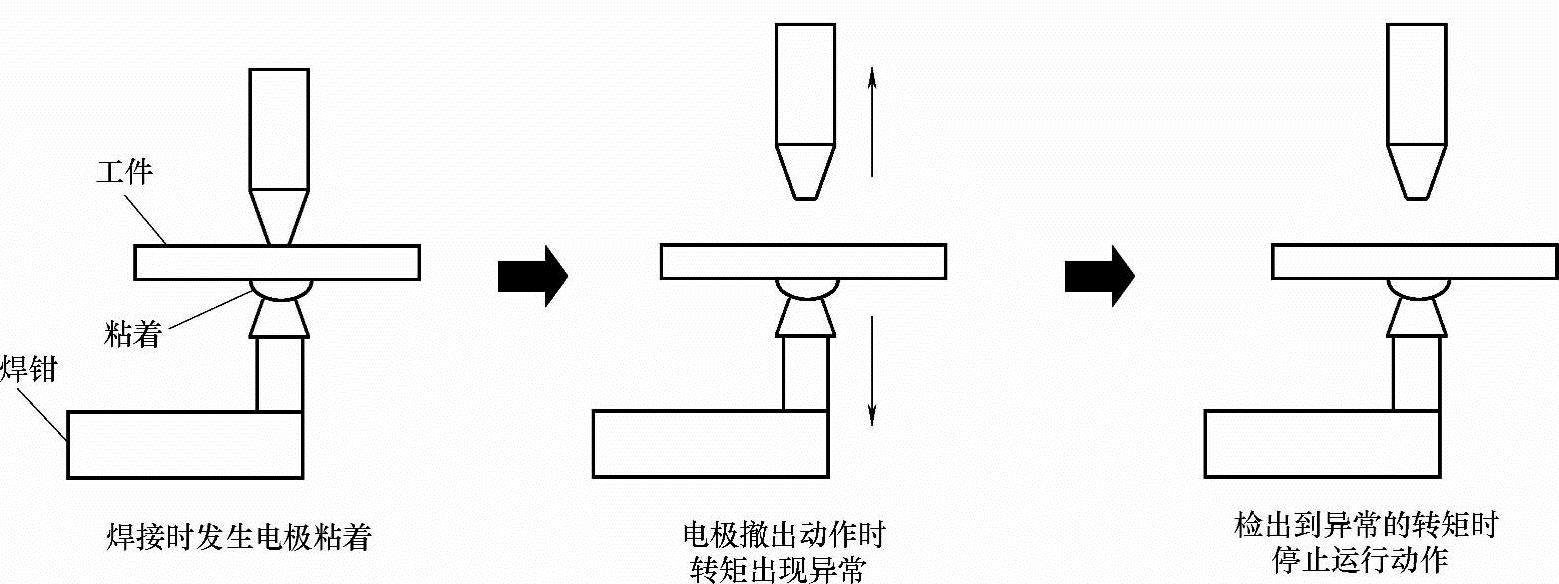
图5-40 电极粘着检出功能
(2)功能机器人或焊钳动作过程中出现电动机转矩异常时,就会立即停止。
4.接触动作控制功能(柔和接触)
(1)目的 降低焊钳与工件的接触噪声。
(2)功能 通过调整接触压力和接触速度,从而降低焊钳与工件接触时的噪声,如图5-41所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。