



【摘要】:夹具系统通常采用的接近开关和气缸的工作原理如下:1.电感式接近开关的工作原理电感式接近开关由三大部分组成,即振荡器、开关电路和放大输出电路。振荡器振荡及停振的变化被后级放大电路处理并转换成开关信号,传输到PLC,作为夹具关闭的必要条件。当活塞前进到位时,接近开关感应到活塞右边的金属面而接通,向阀岛反馈夹具夹紧到位信号,阀岛收到信号后,关闭相应气路。
夹具系统通常采用的接近开关和气缸的工作原理如下:
1.电感式接近开关的工作原理
电感式接近开关由三大部分组成,即振荡器、开关电路和放大输出电路。振荡器产生一个交变磁场,当金属板件接近这一磁场,并达到感应距离时,在金属板件内产生涡流,从而导致振荡衰减,以至停振。振荡器振荡及停振的变化被后级放大电路处理并转换成开关信号,传输到PLC,作为夹具关闭的必要条件。此时,接近开关的工作指示灯会点亮。如果指示灯没有点亮,则说明板件位置没有放好,夹具则不会关闭,否则会将板件压变形,如图4-37所示。
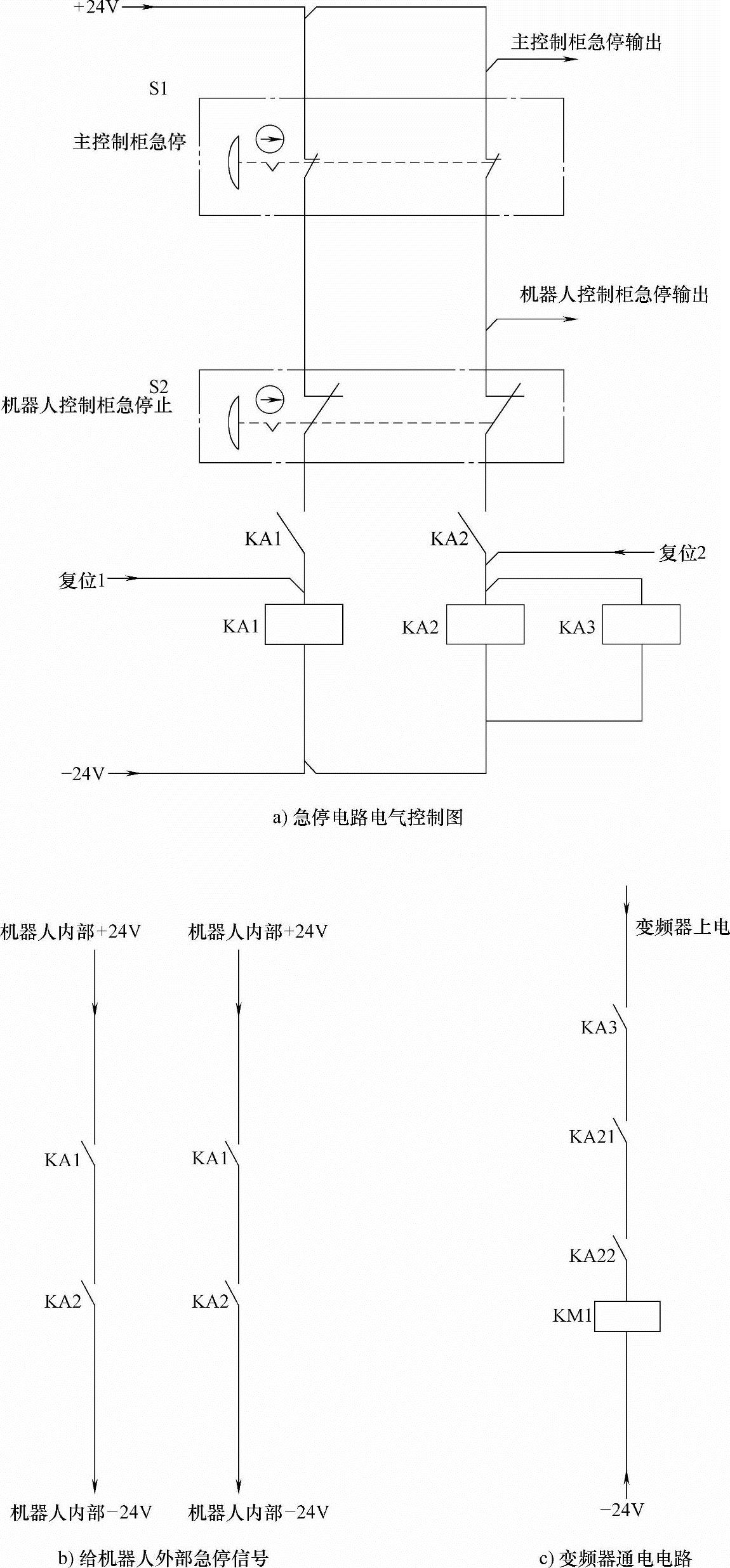
图4-36 急停电路
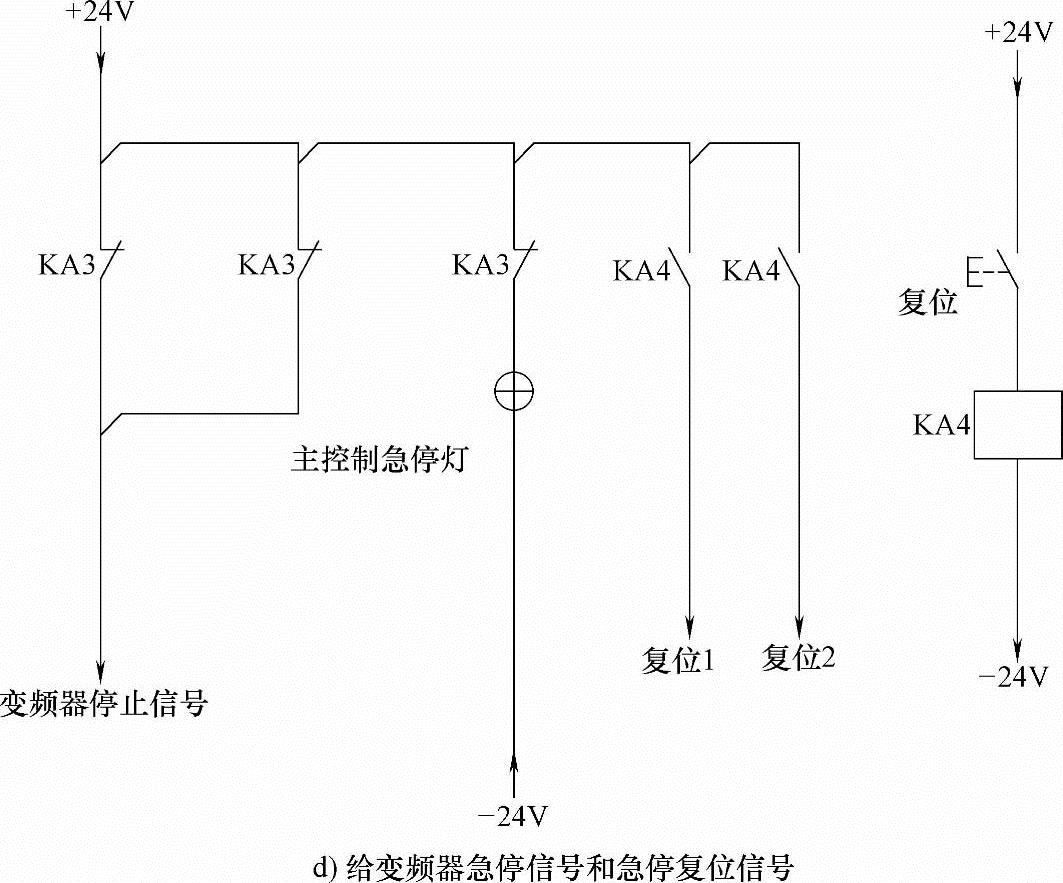
图4-36 急停电路(续)(https://www.xing528.com)
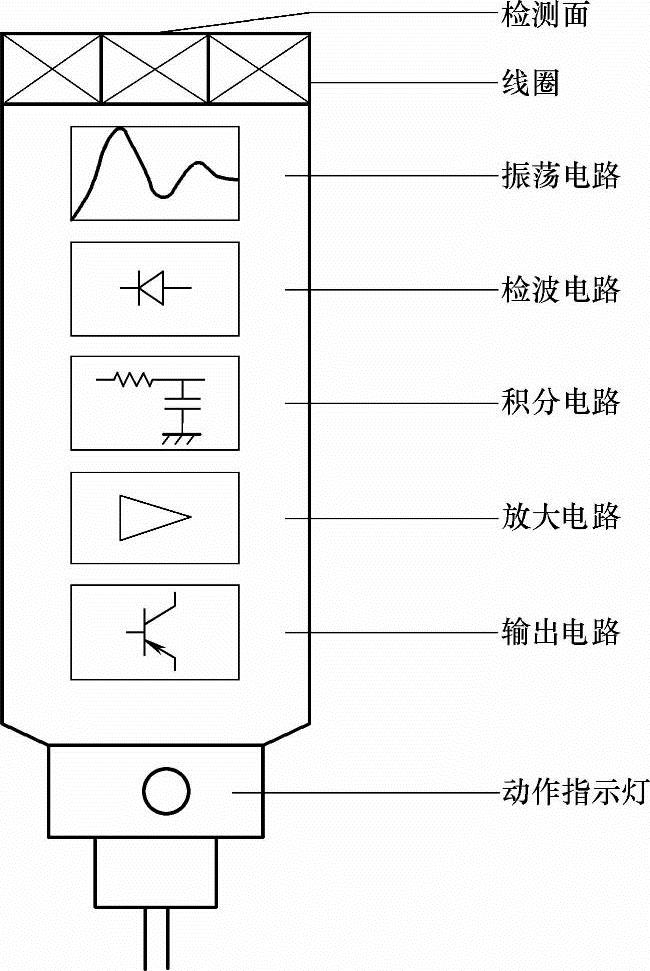
图4-37 电感式接近开关的工作原理图
2.气缸的工作原理
气缸为双作用气缸,其被活塞分为两个腔室,即有杆腔和无杆腔。当PLC接收到夹具夹紧信号,通过总线传输到阀岛,阀岛打开相应气路,压缩空气从无杆腔端的进气口输入,并在活塞左端面上的力克服了运动摩擦力、负载等反作用力,推进活塞前进,有杆腔内的空气经该端排气口排入大气,使活塞伸出,从而带动夹具夹紧。当活塞前进到位时,接近开关感应到活塞右边的金属面而接通,向阀岛反馈夹具夹紧到位信号,阀岛收到信号后,关闭相应气路。同样,当PLC接收到夹具松开信号时,压缩空气从有杆腔输入,无杆腔气体从排气口排出,完成夹具松开动作,如图4-38所示。
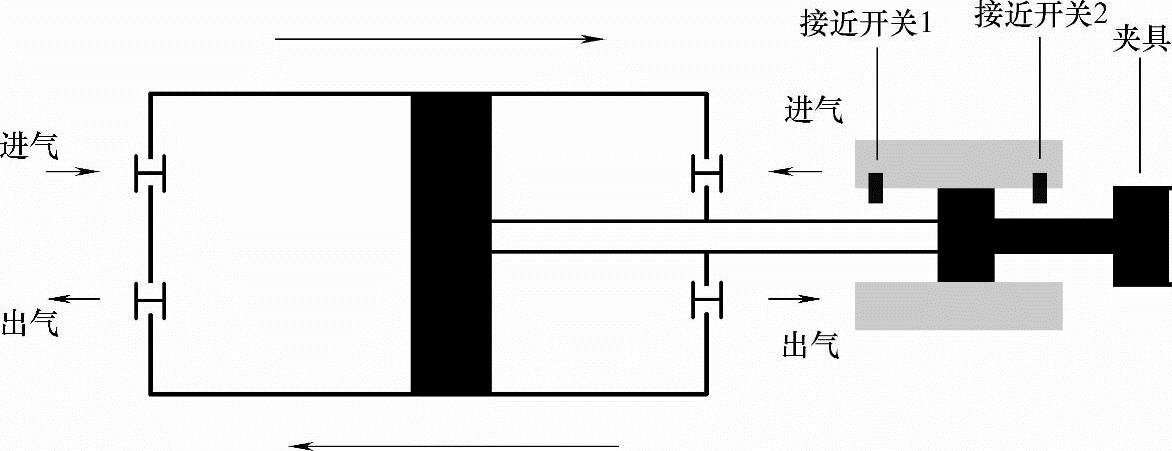
图4-38 气缸的工作原理图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。