



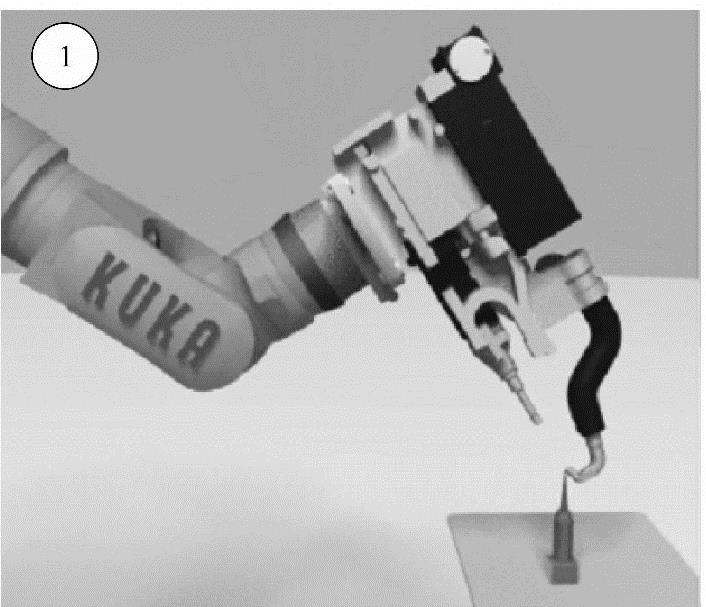
【摘要】:KUKA机器人在测量TCP时采用XYZ参照法时,它将新工具与已测量过的工具进行比较测量,机器人控制系统比较法兰位置,并对新工具的TCP进行计算,如图4-17和图4-18所示。准备 计算已测量工具的TCP数据。图4-18 计算新工具的TCP数据2)为新工具给定一个号码和名称,用“继续”键确认。
KUKA机器人在测量TCP时采用XYZ参照法时,它将新工具(此处特指焊钳)与已测量过的工具进行比较测量,机器人控制系统比较法兰位置,并对新工具的TCP进行计算,如图4-17和图4-18所示。
1.XYZ参照法的基本条件
(1)前提 在连接法兰上装有一个已测量过的工具,运行方式为T1或T2。
(2)准备 计算已测量工具的TCP数据。
1)选择菜单序列准备运行→测量→工具→XYZ参照。
2)输入已测量工具的编号。
3)记录X、Y和Z数值。
4)用“取消”键关闭窗口。
2.XYZ参照法的操作步骤
1)选择菜单序列准备运行→测量→工具→XYZ参照。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-17 计算已测量工具的TCP数据
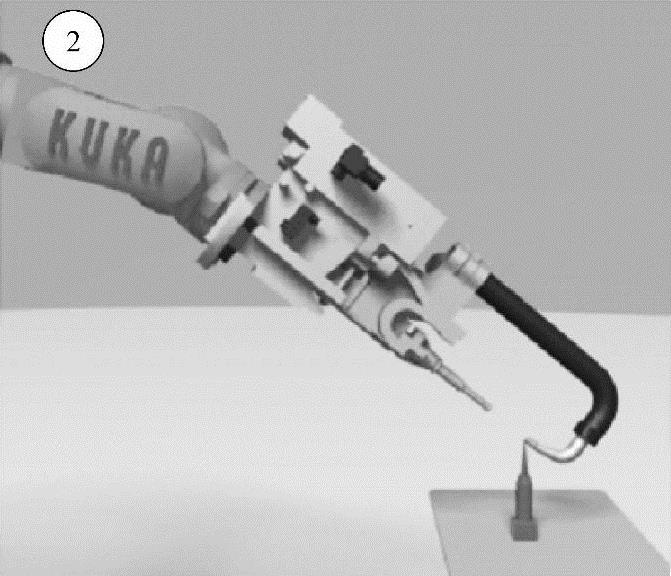
图4-18 计算新工具的TCP数据
2)为新工具给定一个号码和名称,用“继续”键确认。
3)输入已测量工具的TCP数据,用“继续”键确认。
4)用TCP移至任意一个参考点,单击“测量”,用“继续”键确认。
5)将工具空移,然后拆下,安装上新工具。
6)用新工具的TCP移至参考点,单击测量,用“继续”键确认。
7)单击备份,数据被保存,窗口关闭;或按下负载数据,数据被保存,一个窗口将自动打开,可以在窗口中输入负载数据;或按下ABC 2点法或ABC世界坐标法,数据被保存,一个窗口将自动打开,可以在此窗口中确定工具坐标系的方向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。