



1)机器人操作人员必须经过培训,熟悉设备的一般性能和结构,且持证操作。
2)保持机器人工作站及周围环境的清洁。
3)操作人员对设备按照点检的要求进行检查。
4)操作人员必须遵守有关设备的管理制度、规定和标准,使用和维护设备。
5)机器人工作站的具体操作步骤如下:
首先检查系统供水供气是否正常,然后按如下顺序进行操作。
①打开变稳压器“电源开关”,按下电源“启动”按钮。
②打开控制箱“电源开关”。电控箱操控面板如图4-1所示。
③将示教器上的模式旋钮切换至【示教】(也就是TEACH模式),示教器上的操作键如图4-2所示。
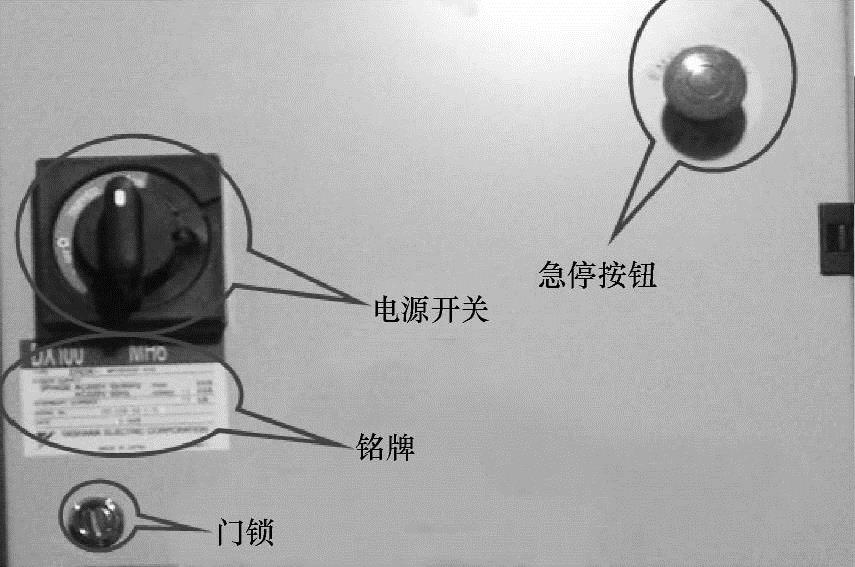
图4-1 电控箱操控面板
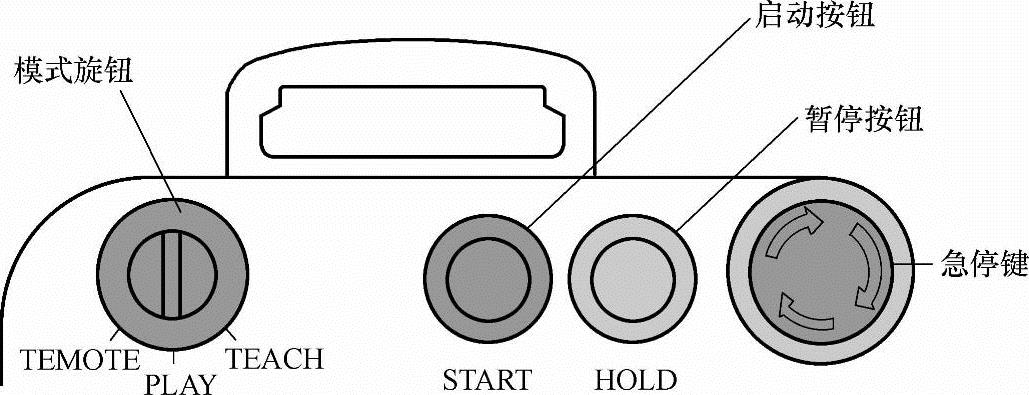
图4-2 示教器操作键功能
④按下【伺服准备】使其灯闪亮。示教器移动键及功能键如图4-3和图4-4所示。
⑤按下示教器移动键上的【伺服接通】按钮,使其保持常亮状态。
⑥注意本体的位置及姿势。把速度调到低速,防止发生危险。
⑦用关节坐标或直角坐标带动机器人。
⑧工作结束关机。在就绪灯亮的前提下,按下操作台上“急停”按钮,机器人伺服断电,释放“急停”按钮,依次断开控制器、配电柜中的机器人变压器、点焊控制箱和工作站控制柜对应的各电源开关。

图4-3 示教器移动键

图4-4 示教器功能键
⑨工作结束切断电源后,关闭压缩空气,待5min后关闭冷却水。
6)安全操作的注意事项:
①开机前应确保本体动作范围内无人或杂物。
②检查控制箱与本体及与其他设备连接是否正确。
③检查供给电源与机器人所需电源相匹配。
④检查各个急停按钮和暂停按钮,确保其功能有效。(https://www.xing528.com)
⑤本体运转时,严禁人或物进入其工作范围之内。
⑥机器人工作时,禁止进入安全围栏内。
⑦进入围栏时,应将门上联锁开关拔出,通过围栏门进入。
⑧使用中注意观察电极修磨器是否正常。
⑨工作站开机操作后,观察机器人的第一步动作是否正常。等机器人正常焊接完第一个点后,开机操作才算是正常完成。
⑩工作中,因工件未到位而停止时,摆正工件,按“就绪”按钮6s才能重新开始工作。
(11)机器人报警时,机器人均处在暂停状态。按示教盒【SELECT】键,取消报警后,按下操作台上的“启动”按钮,机器人继续运行。报警信号取消不了时,可依据机器人的报警号查阅本教材“6.2错误信息一览表”,并做相应处理。
(12)随时观察机器人工作状态,着重注意以下几点:
a.焊点是否正确。
b.姿态是否合适。
c.冷却系统是否完好。
d.焊接电流是否异常。
e.伺服电动机、RV减速机、焊接电源等是否有异常噪声、振动、温升。
f.发现问题,立即停机,找有关维修工或技术人员检查修理。
7)其他。RV减速器工作约6000h加注专用润滑油一次。
8)编程示教的安全注意事项。
①安全基本原则。在保证人身安全的前提下,注意保证设备的安全。
②生产安全。
a.非工作站操作者无权对工作站进行操作。
b.无关人员不能进入机器人工作区(安全围栏内)。
c.工作站正常工作时,不能随便按动操作台按钮。
③示教安全。
a.示教时尽量避免站在机器人与工件或机器人与固定物之间,以免机器人异常动作产生对人体的伤害。
b.示教时一定要注意示教速度:机器人与焊枪、焊枪与工件较近时应采用较低的速度示教。避免机器人与焊枪、焊枪与工件相撞。
c.示教过程和工作过程中,一个程序未结束、严禁示教另一程序(主程序和其子程序除外。
d.示教或修改完成后,一定要认真验证程序的正确性,验证后方可切换到正常工作状态(验证时应采取较低的速度)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。