



在自动运行中,待机状态超过设定时间以上时,机器人的伺服电源自动变成OFF状态。
1.省电时间的设定
在计数器M270里设定省电时间,单位是s,最大设定时间是600s(10min),输入601s时,就自动设定为600s。设定时间为0时,省电功能变成无效,即使待机状态一直持续伺服也不会变成OFF。
2.省电种类
等待主程序的启动信号。伺服ON后,由控制柜发出信号,等到启动信号输入为止的时间超过省电设定时间时,自动变为伺服OFF。在等待启动信号的过程中,变成了省电模式时,只要从控制柜启动信号发出来后就自动变成伺服ON,主程序启动。在省电模式下,等待启动信号过程中,即使切换到示教模式,但如果不变成伺服ON,省电模式还是持续的。回到远程模式下,启动信号输入后自动的变成伺服ON,主程序启动。在省电模式下,等待信号过程中,切换到示教模式伺服变成ON,但在省电模式解除时,启动信号输入,则不自动变成伺服ON,而在示教盒上显示(伺服OFF中的启动输入(主))。
上述情况是通常情况,所以要按照从控制柜里的伺服ON信号→启动信号的顺序输入信号,如下所述。
1)通常情况(见图3-33)。
2)省电在持续状态时(见图3-34)。
3)省电后的模式1切换(见图3-35)。

图3-32 通常模式→冷模式的切换条件
4)省电后的模式2切换(见图3-36)。
5)自动运行中的待机状态。在自动运行中(示教盒的启动灯亮),机器人在持续停止动作的状态下,如果子任务的启动信号等待和WAIT命令超过了设定的省电时间,就变成伺服OFF。伺服电源是OFF,但启动灯一直亮。
解除了待机状态,程序到达了移动命令的时候,自动变成伺服ON再次开始运行。
6)自动运行中的省电。
程序举例:(https://www.xing528.com)
MOV①
WAIT IN#(1)=ON
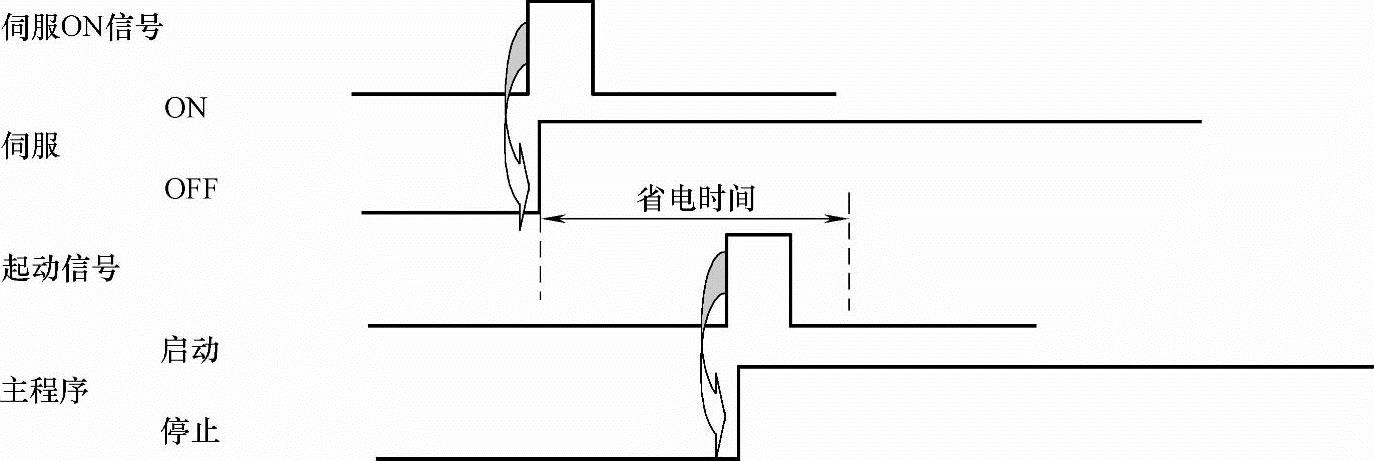
图3-33 通常情况
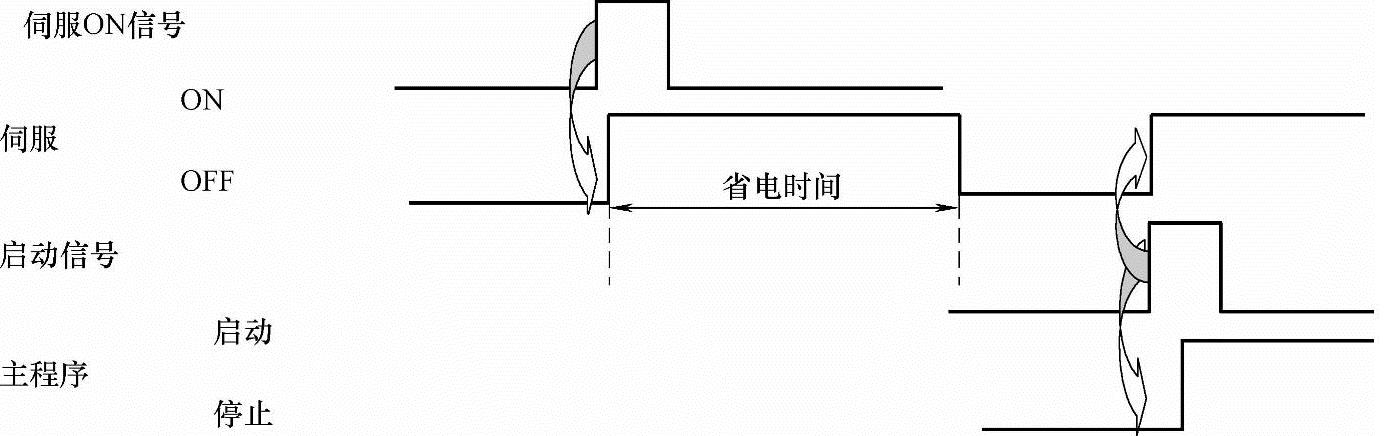
图3-34 省电在持续状态时
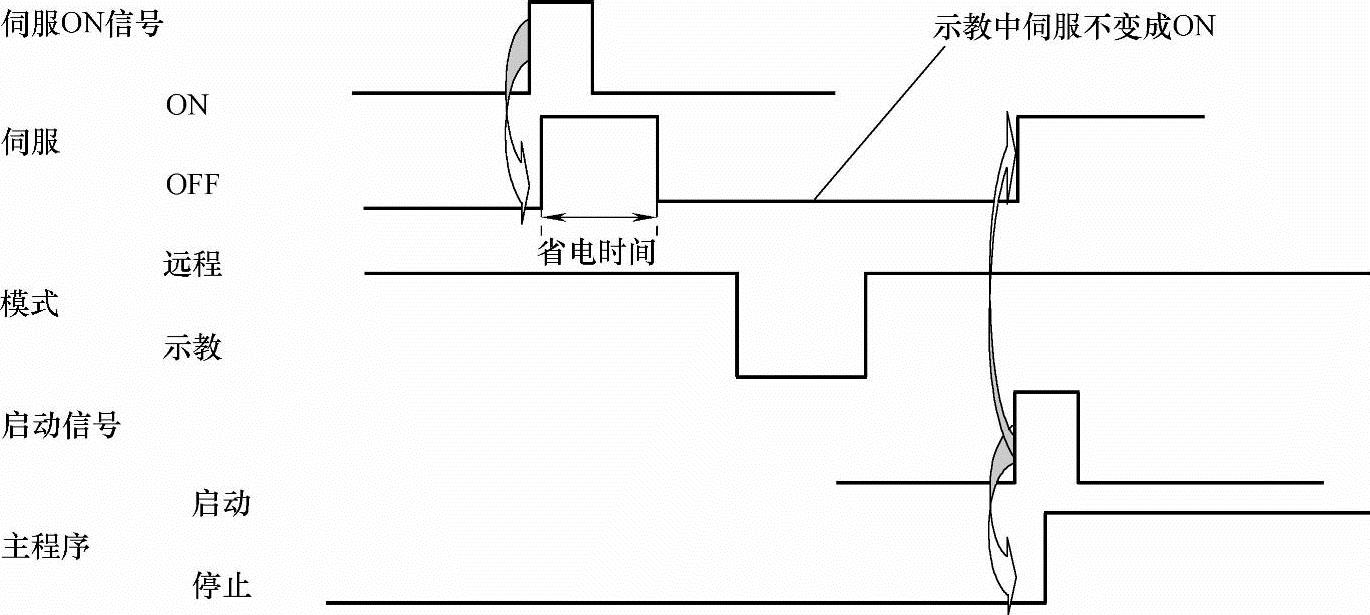
图3-35 省电后的模式1切换
MOV②
自动运行中的省电的时序图如图3-37所示。

图3-36 省电后的模式2切换

图3-37 自动运行中的省电的时序图
重要提示:在省电功能里,使用【Y-SVON】名称的特殊程序,不要进行编辑或删除。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。