



【摘要】:图3-29 手动焊钳更换操作界面图3-29中数字代表的含义如下:1)①表示焊钳号:设定连接、断开焊钳的焊钳号。5)⑤表示焊钳识别信号:显示ATC的工具识别信号状态。
实行焊钳、抓手或焊钳、焊钳工具更换时,使用焊钳更换程序和焊钳更换命令。
1.焊钳更换程序的设定
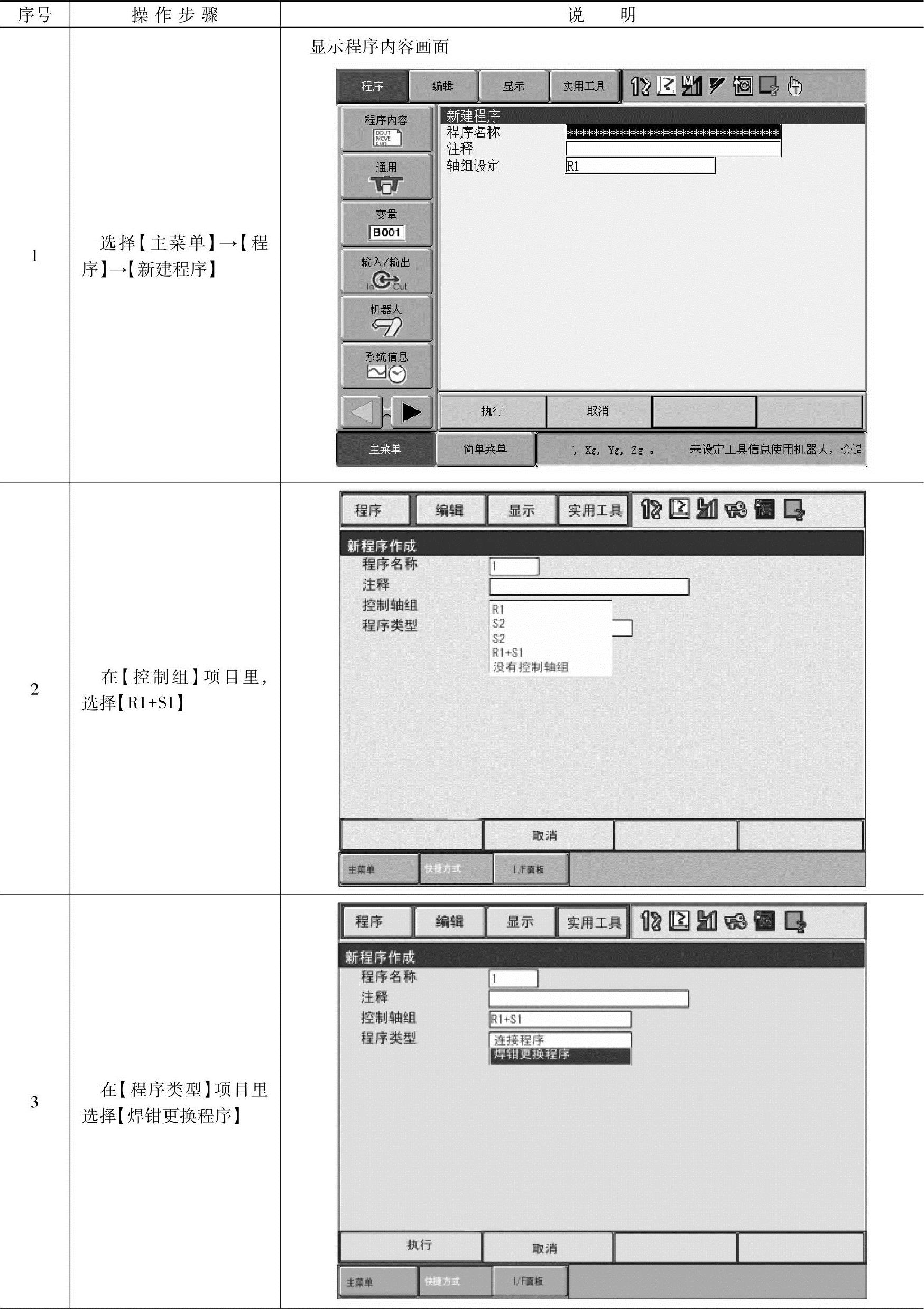
在焊钳更换程序里,把程序类型设定为【焊钳更换程序】。设定焊钳更换程序的操作步骤见表3-13。
2.焊钳更换命令(GUNCHG)
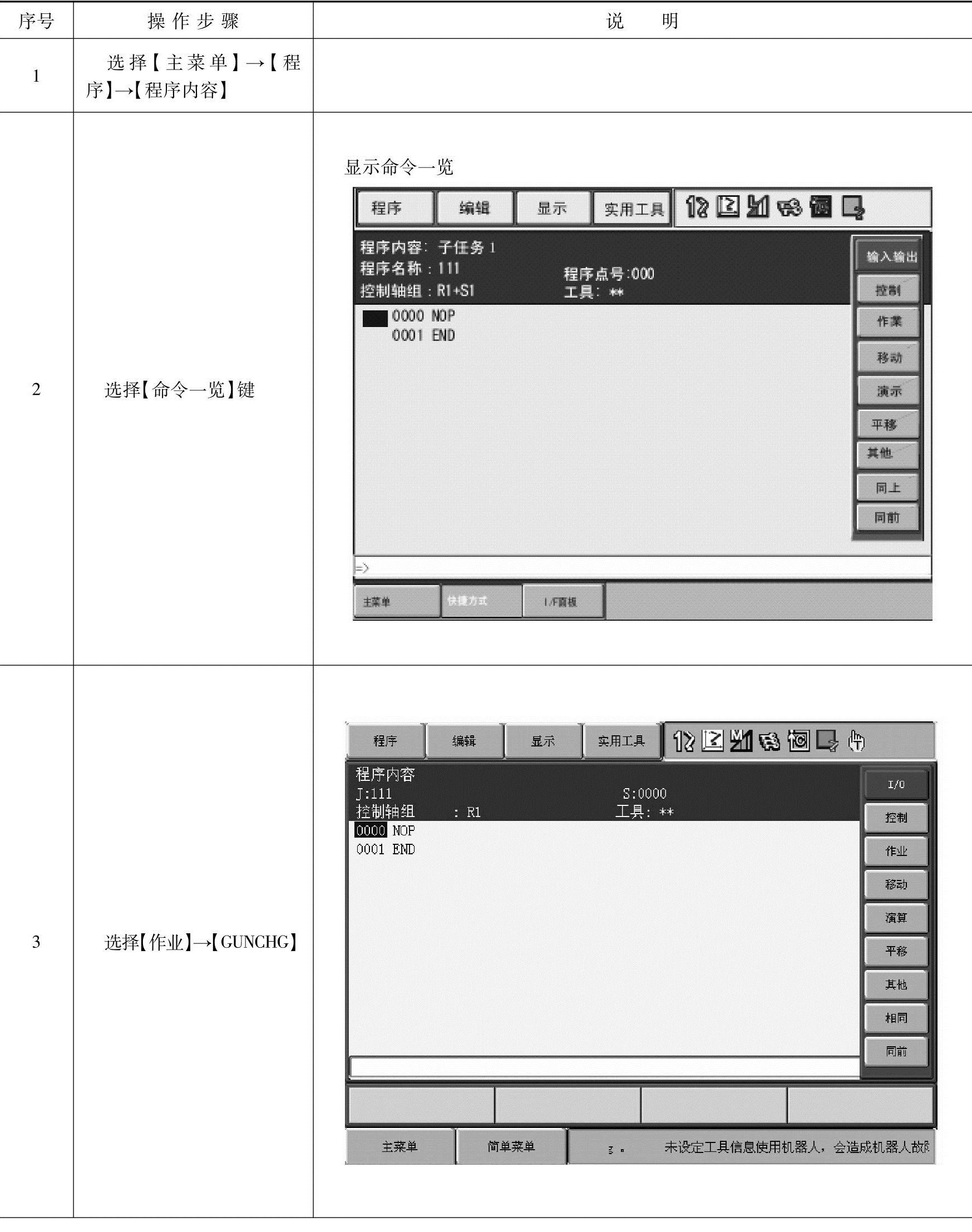
焊钳更换命令的操作步骤见表3-14。
表3-13 设定焊钳更换程序的操作步骤
(续)

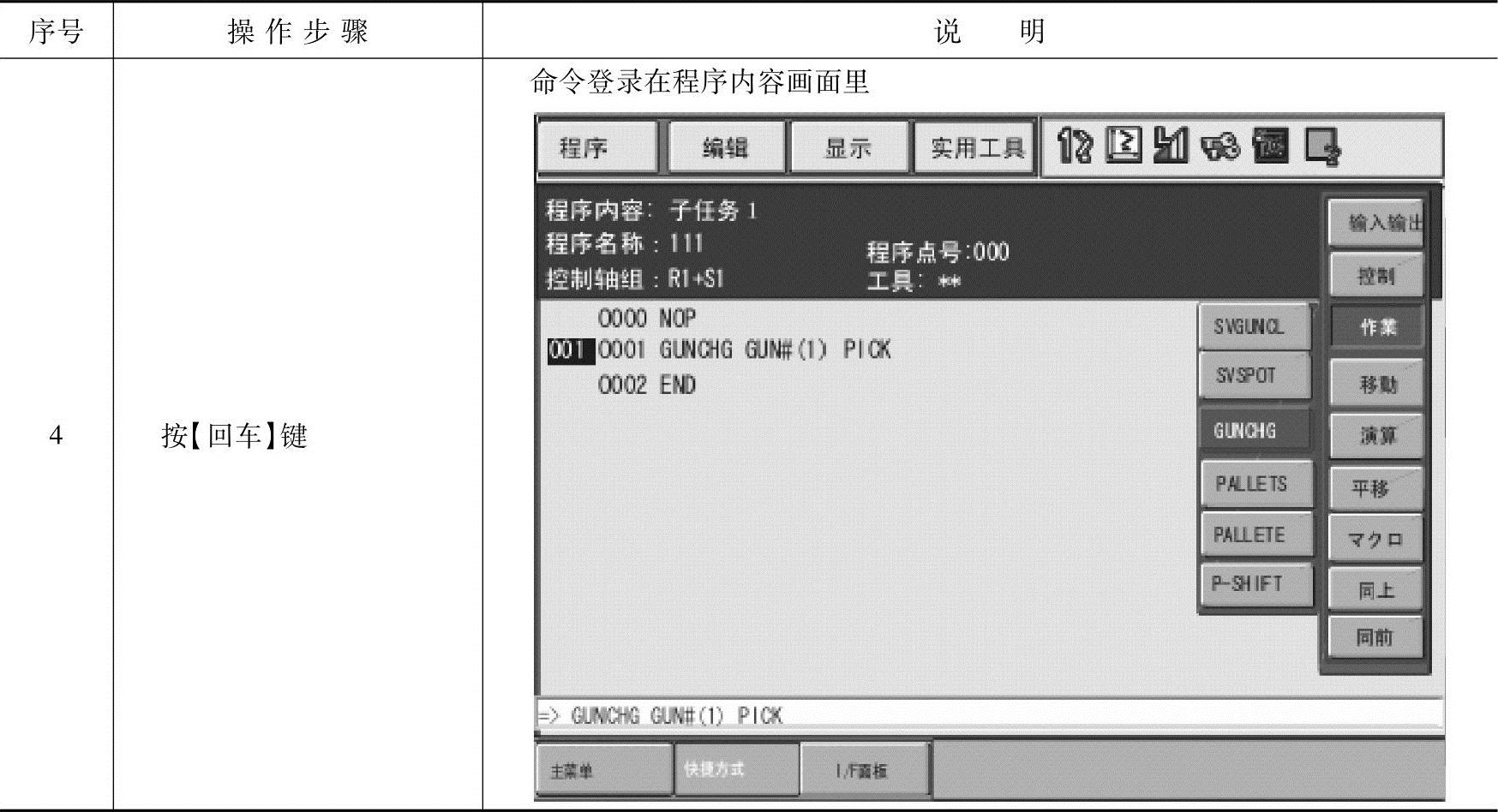
表3-14 焊钳更换命令的操作步骤
(续)
更换焊钳时使用的命令:
 (https://www.xing528.com)
(https://www.xing528.com)
上述命令中数字代表的含义如下:
1)①表示焊钳号:指定连接或者断开时的焊钳号。
2)②表示空打加压力文件:选择连续(PICK)或断开(PLACE)。连接(PICK):只有焊钳轴的伺服电源变成ON状态;断开(PlACE):只有焊钳轴的伺服电源编程OFF状态,机器人的伺服电源不变成OFF。
3.手动焊钳更换
不使用焊钳更换命令,可以实施焊钳的连接、断开,如图3-29所示。
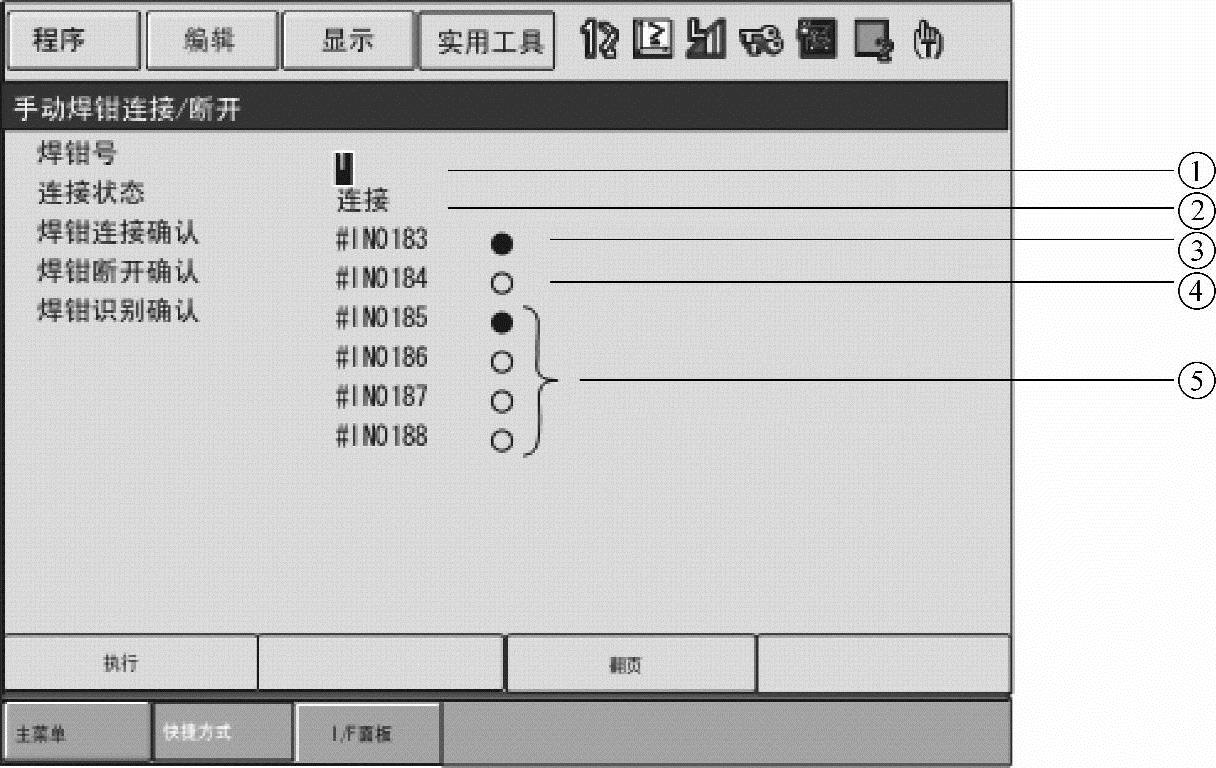
图3-29 手动焊钳更换操作界面
图3-29中数字代表的含义如下:
1)①表示焊钳号:设定连接、断开焊钳的焊钳号。
2)②表示连接状态:显示现在的连接状态,连接为伺服ON,断开为伺服OFF。
3)③表示焊钳连接信号:显示ACT连接的信号状态。
4)④表示焊钳断开信号:显示ATC断开信号状态。
5)⑤表示焊钳识别信号:显示ATC的工具识别信号状态。
【执行】:用【执行】键来实现焊钳的连接、断开,将【连接】状态变为【离开】,或将【离开】状态变为【连接】。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。