



电动机在人为地改变了某个参数后所得到的机械特性,称为人工机械特性。
1.转子串联电阻的机械特性
绕线转子异步电动机可以通过集电环和电刷把外部的调速电阻与转子绕组相串联,如图1-12a所示。
转子电路串联电阻后,其机械特性如图1-12b所示,主要特点是:
1)同步转速n0不变;
2)临界转矩TK不变;
3)临界转速nK随外接电阻而变,外接电阻越大,临界转速越低;
4)外接电阻越大,机械特性越“软”;
5)外接电阻越大,起动转矩越大,所以迄今为止,仍广泛地应用于起重机械中。
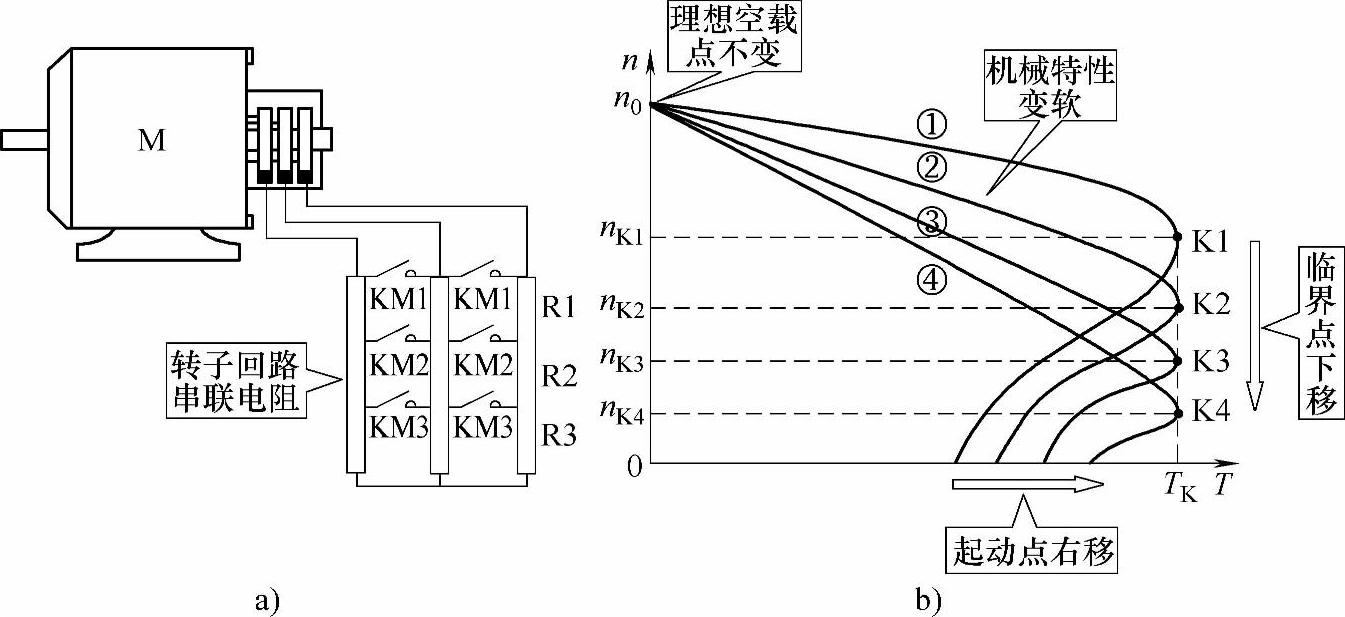
图1-12 转子串联电阻的机械特性
a)转子串联电阻的电路 b)机械特性图
2.改变电压的机械特性
软起动器就是通过改变电动机的输入电压来改善其起动性能,电路图如图1-13a所示。改变输入电压后的机械特性如图1-13b所示,主要特点是:
1)同步转速n0不变;
2)临界转速nK不变;
3)临界转矩TK随电压的减小而减小;(https://www.xing528.com)
4)电压越低,机械特性也越“软”;
5)电压越低,起动转矩越小,所以软起动器不能用于重载起动的场合。
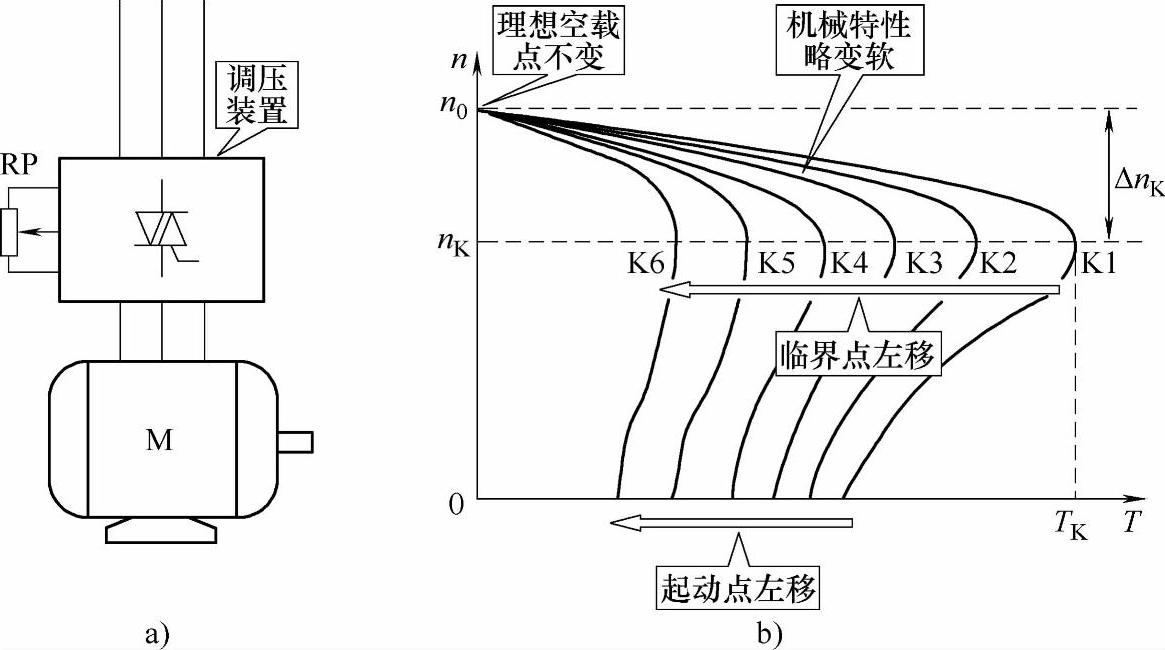
图1-13 改变电压的机械特性
a)电路图 b)机械特性
3.改变频率的机械特性(kU=kf)
电源电压经变频器UF变频后供电动机,电压和频率成正比的情况下变频后电动机的机械特性如图1-14b所示,主要特点是:
1)同步转速n0随频率的下降而下降;
2)临界转速nK也下降,但临界转差基本不变;
3)临界转矩TK随频率的下降而略有减小;
4)机械特性基本平行;
5)通过适当的功能预置,可以增大电动机的起动转矩,所在以变频调速的情况下,可以进行重载起动。
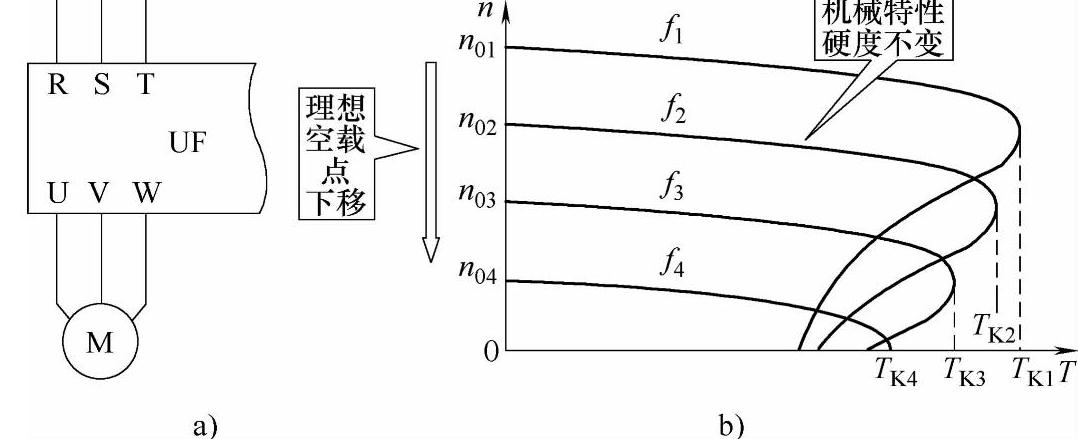
图1-14 fX≤fN时的机械特性
a)变频调速 b)变频机械特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。