



【摘要】:图1-9 异步电动机的自然机械特性a)自然机械特性 b)机械特性的含义理想空载点 电动机输出轴上的转矩为0,称为理想空载点。临界点 异步电动机的机械特性有一个拐点K。在这一点,电动机所能产生的电磁转矩最大,称为临界转矩,用TK表示,K点称为临界点。当转速下降时,转差Δn2增大,转子的感应电动势和电流也增大,所产生的电磁转矩也较大。
1.自然机械特性
异步电动机的自然机械特性如图1-9所示。
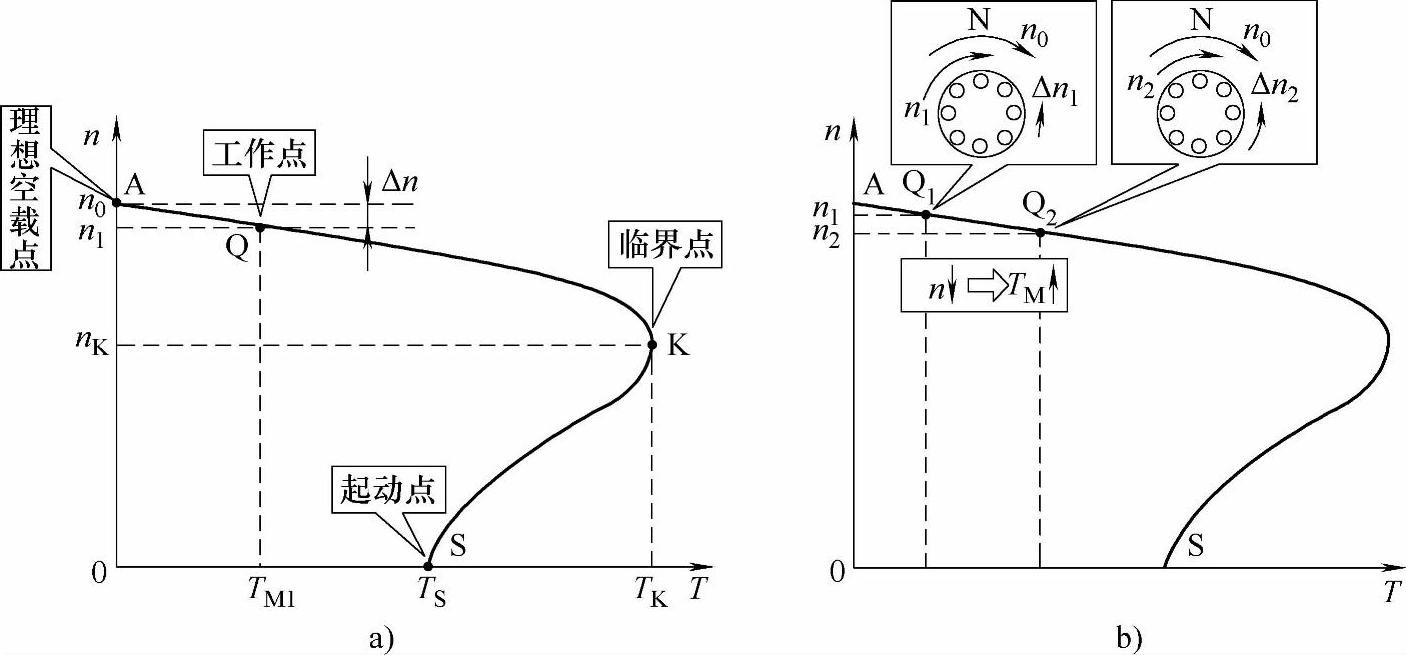
图1-9 异步电动机的自然机械特性
a)自然机械特性 b)机械特性的含义
(1)理想空载点 电动机输出轴上的转矩为0,称为理想空载点。这时,电动机的转速可以达到同步转速n0,如图1-9a所示。
(2)起动点 电动机刚接通电源,但转速仍为0时称为起动点,这时的转矩称为起动转矩TS,也叫堵转转矩,如图1-9中S点。
(3)临界点 异步电动机的机械特性有一个拐点K。在这一点,电动机所能产生的电磁转矩最大,称为临界转矩,用TK表示,K点称为临界点。与此对应的转速称为临界转速nK。
2.机械特性的含义
机械特性的含义如图1-10所示。
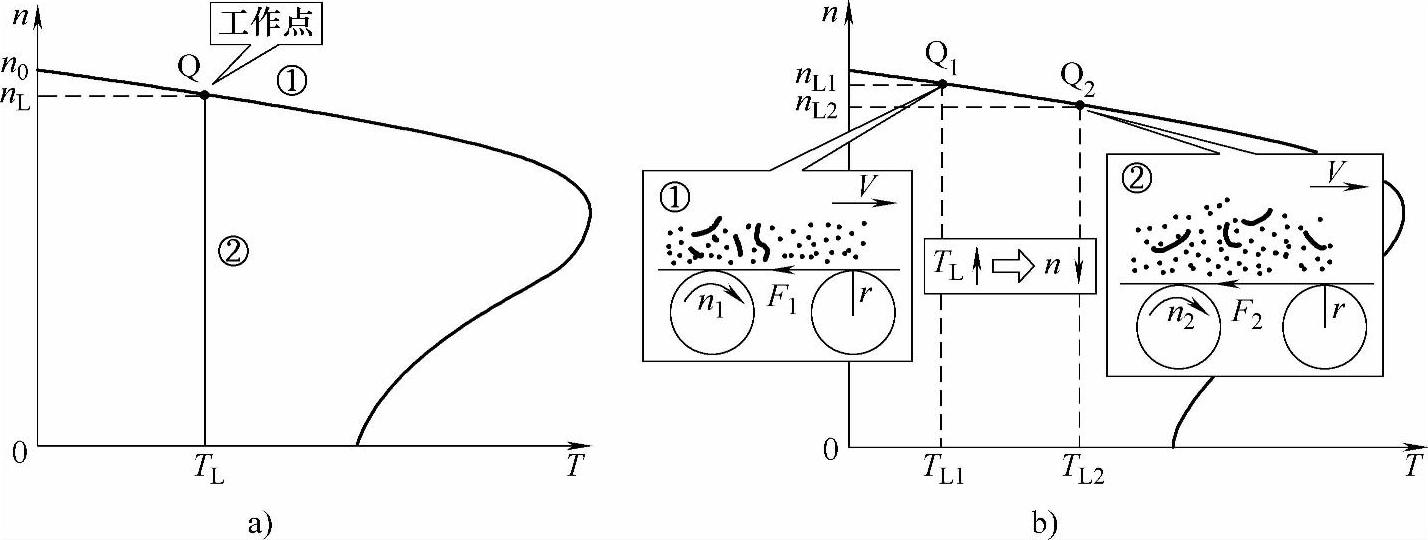
图1-10 机械特性的含义(https://www.xing528.com)
a)拖动系统的工作点 b)机械特性的含义
从电动机的角度看,如图1-10a所示,当转速较高,转差Δn1较小,转子绕组切割旋转磁场所产生的感应电动势和电流也较小,所以转矩也较小。
当转速下降时,转差Δn2增大,转子的感应电动势和电流也增大,所产生的电磁转矩也较大。
所以从电动机的角度看,转速下降,则转矩增加。
从负载的角度看,如图1-10b所示,当负载较轻、阻转矩为TL1时,用于克服TL1所需的电磁转矩较小,拖动系统的工作点为Q1点,转速较高,为nL1。当负载的阻转矩增大为TL2时,用于克服TL2所需要的电磁转矩也增大,拖动系统的工作点移至Q2点,转速下降为n2。所以从负载的角度看,当负载的阻转矩增大时,拖动系统的转速下降。
3.机械特性的“硬”与“软”
机械特性的“硬”与“软”如图1-11所示。

图1-11 机械特性的“硬”与“软”
a)硬特性 b)软特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。