



对于矢量控制系统,通常采用TTL/HTL脉冲编码器进行闭环控制,当编码器出现故障时,可能导致一些故障的产生,一部分是直接报出编码器错误,根据故障信息,维护人员可以从故障列表中查到具体的说明,按照推荐的相关解决办法处理;有时系统不直接报出编码器故障,可能会报出堵转、过电流类故障。如果出现上述的这些编码器相关的故障,我们将如何进行初步判断呢?我们可以采用下面的几种处理方法。
在调试时或更换编码器后出现故障,可能的原因有:
1)编码器接线错误。
2)编码器损坏。
3)电磁、接地干扰。
4)编码器配置错误。
5)装置的编码器输入接口损坏(例如SMC30)。
6)编码器电缆。
7)机械安装不可靠。
运行过程中,编码器故障,可能的原因有:
1)电磁、接地干扰。
2)编码器损坏。
3)机械安装不可靠。
4)接口模板损坏。
当发生编码器故障,导致系统无法运行时,可以暂时将控制模式P1300改为无编码器模式或V/f模式运行测试,确定装置和电动机运行是否正常,然后再进行编码器故障分析。
1)在电动机运行时,读取编码器的实际返回值,如果实际值的大小相同,但是极性相反,这种情况的可能原因是编码器接线的极性不正确,即A、B通道相序反了。解决办法是:
•改变编码器A、B通道接线线序;
•改变参数P0410;
•改变电动机电缆的相序。
2)如果没有读到实际速度反馈值,说明没有采集到编码器的反馈,则需检查:
•编码器接线;(https://www.xing528.com)
•编码器参数配置;
•编码器是否损坏;
•模板接口是否损坏。
3)能够读取到编码器的反馈值,但是实际值与设定值不符:
•电动机速度变化时,实际速度跟随变化—检查每圈脉冲值的设定;
•电动机速度变化时,实际速度不跟随变化—编码器本身故障。
(4)编码器反馈值波动比较大,但是实际电动机运行稳定:
•干扰导致—按照EMC规则检查接线和接地;
•编码器机械安装的同心度;
•模板接口故障—结合示波器检查。
1.示波器测试
使用示波器,测量A、B通道测试脉冲波形,如图10-17所示。
如果波形失真严重,则要考虑下列情况:
1)传输距离。
2)电磁干扰。
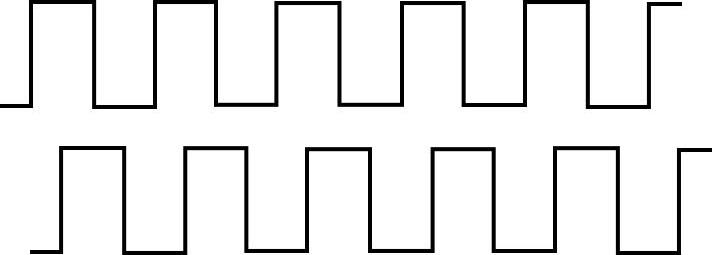
图10-17 方波编码器信号波形图
3)编码其本身故障。
2.万用表测试
手动或低速运行电动机,分别测量A通道对地、B通道对地的电压,对应每个脉冲应该是高低电平交替闪烁,检查高电压值是否在正确范围。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。