



1.任务说明
配置两个节点之间的SINAMICS Link通信,需要传送的数据为:
1)从节点1发送到节点2的数据:
—r0898 CO/BO:顺序控制驱动1的控制字(1个PZD),本例中为PZD 1;
—r0079 CO:总转矩设定值(2个PZD),本例中为PZD 2;
—r0021 CO:经过滤波的转速实际值(2个PZD),本例中为PZD 3。
2)从节点2发送到节点1的数据:
—r0899 CO/BO:顺序控制驱动2的状态字(1个PZD),本例中为PZD 1。
2.步骤
1)在所有节点中设置p0009=1,用于修改设备配置。
2)在所有节点上为CBE20设置运行方式SINAMICS Link:
—p8835=3。
3)指定相关设备的节点编号:
—节点1:设置p8836=1;
—节点2:设置p8836=2。
4)在两个节点中设置p0009=0,执行“Copy RAM to ROM”接着上电。
5)通过p8812[0]=1将所有CBE20设置为等时同步运行。
6)设置p8811=16限制最大节点数。
在两个节点中设置p0009=0,执行“copy RAM to ROM”接着上电,以激活修改的固件类型以及CBE20中的新设置。
7)定义节点1的发送数据:
—定义节点1需要发送的PZD:
p2051[0]=Drive1:r0898(PZD长度为1字);
p2061[1]=Drive1:r0079(PZD长度为2字);
p2061[3]=Drive1:r0021(PZD长度为2字);
—将这些PZD分配至节点1的发送缓冲器(p8871):
p8871[0]=1(r0898);
p8871[1]=2(r0079第一部分);
p8871[2]=3(r0079第二部分);
p8871[3]=4(r0021第一部分);
p8871[4]=5(r0021第二部分)。
这样便完成了对节点1的16字报文中的数据位置的定义。
8)定义节点2的接收数据:(https://www.xing528.com)
—确定节点2的接收缓冲器p8872中的位0~位4上的数据填入来自节点1接收的数据:
p8872[0]=1;
p8872[1]=1;
p8872[2]=1;
p8872[3]=1;
p8872[4]=1;
—确定将节点1的PZD1、PZD2和PZD3填入节点2的接收缓冲器
p8870中的位0~位4:
p8870[0]=1(PZD1);
p8870[1]=2(PZD2第一部分);
p8870[2]=3(PZD2第二部分);
p8870[3]=4(PZD3第一部分);
p8870[4]=5(PZD3第二部分);
—现在r2050[0]、r2060[1]和r2060[3]包含了来自节点1的PZD 1、PZD 2和PZD 3的值。
9)定义节点2的发送数据:
—确定节点2需要发送的PZD:
p2051[0]=Drive1:r0899(PZD长度为1字);
—将这些PZD分配至节点2的发送缓冲器(p8871):
p8871[0]=1。
10)定义节点1的接收数据:
—确定节点1的接收缓冲器p8872中的位0上的数据填入来自节点2接收的数据:
p8872[0]=2;
—确定将节点2的PZD1填入节点1接收缓冲器p8870中的位0:
p8870[0]=1;
—现在r2050[0]包含了来自节点2的PZD 1的值。
在两个节点上执行“从RAM向ROM复制”,用于存储参数设置及数据。
11)重新给这两个节点上电,以激活SINAMICS Link。
SINAMICS Link:组态示例如图9-109所示。
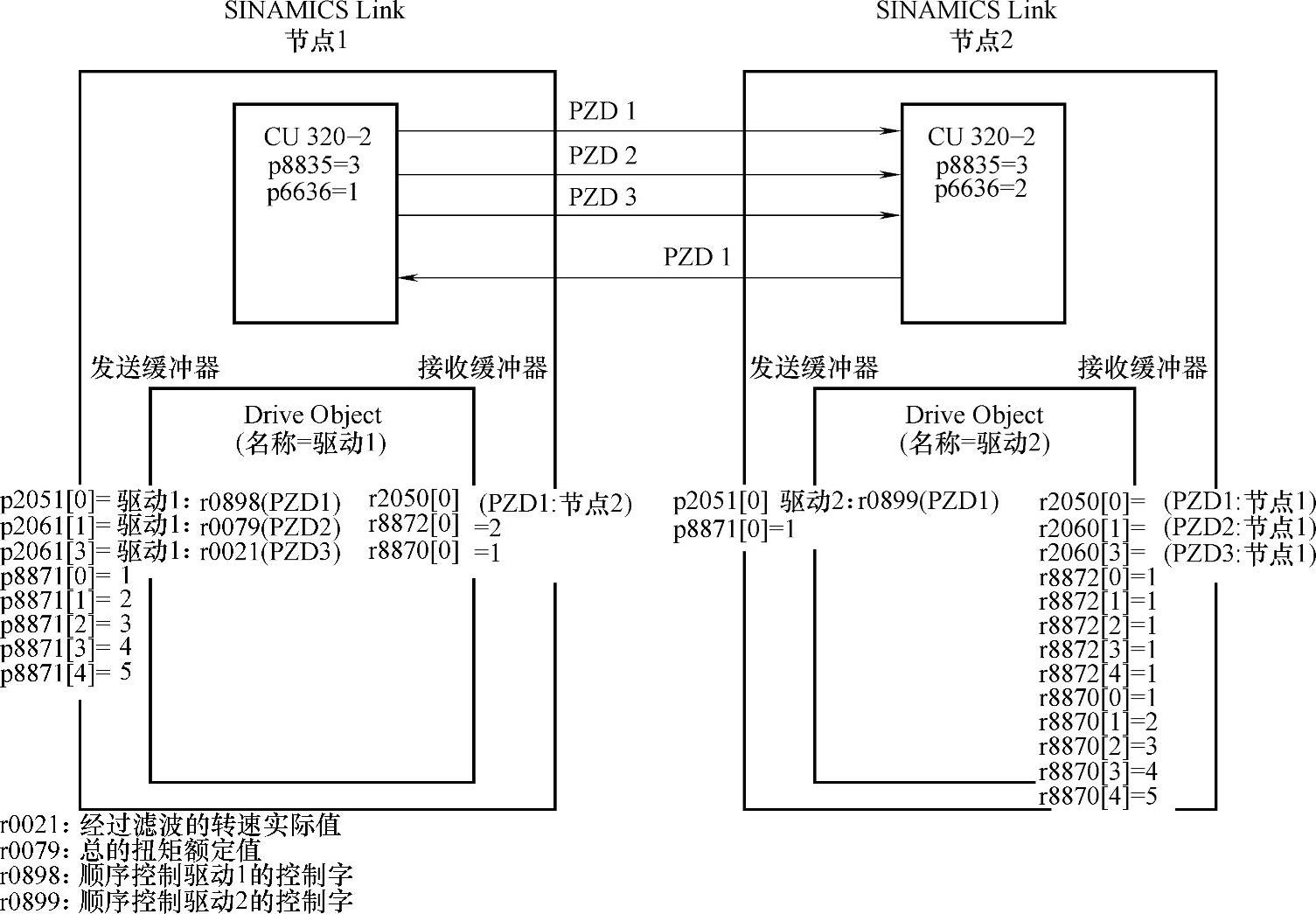
图9-109 SINAMICSLink:组态示例
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。