



执行以下步骤进行调试:
1)将控制单元参数p0009设为1(设备配置)。
2)将控制单元参数p8835设置为3(SINAMICS Link)。
3)将驱动对象参数p2037设置为2(不冻结设定值)。
4)在参数p8836中为节点分配SINAMICS Link节点编号。将第一个控制单元的编号设为1,节点编号0表示对该控制单元取消SINAMICS Link。此时请注意“拓扑结构”一节的说明。
5)将控制单元参数p0009设为0(就绪)。
6)执行“从RAM复制到ROM”。
7)重新给设备上电(关闭/接通控制单元)。
1.发送数据
在此实例中,第一个节点“控制单元1”有两个驱动对象,分别为驱动1和驱动2。执行以下步骤发送数据:
1)在参数p2051[0…15]中为每个驱动对象定义需要发送的数据(PZD)。数据同时会预留在p8871[0…15]的发送槽中。
2)双字必须记录至p2061[x]。双字数据同时会写入p8861[0…15]。
3)在p8871[0…15]中针对每个驱动对象将发送参数指定给自身节点的一个发送槽。
编制驱动1(DO2)的发送数据见表9-26。
表9-26 编制驱动1(DO2)的发送数据

(续)
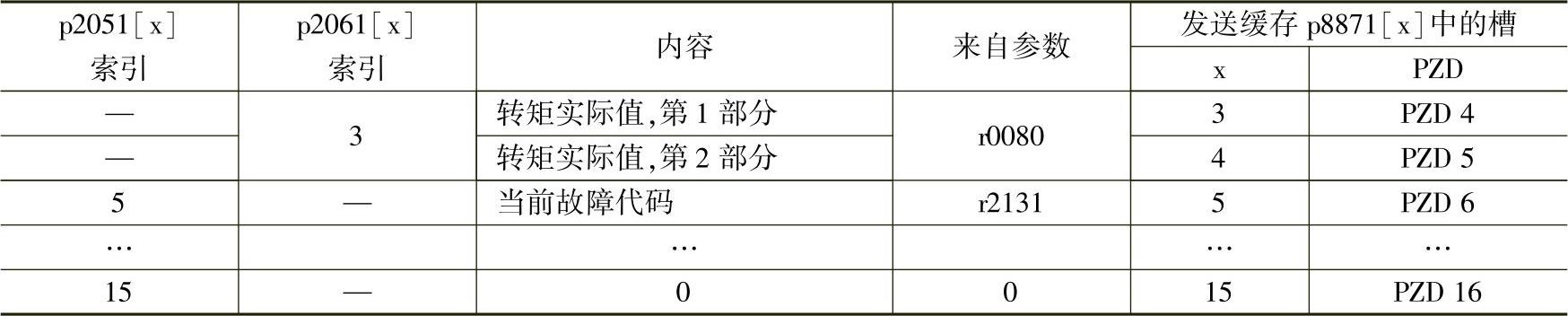
编制驱动2(DO3)的发送数据见表9-27。
表9-27 编制驱动2(DO3)的发送数据
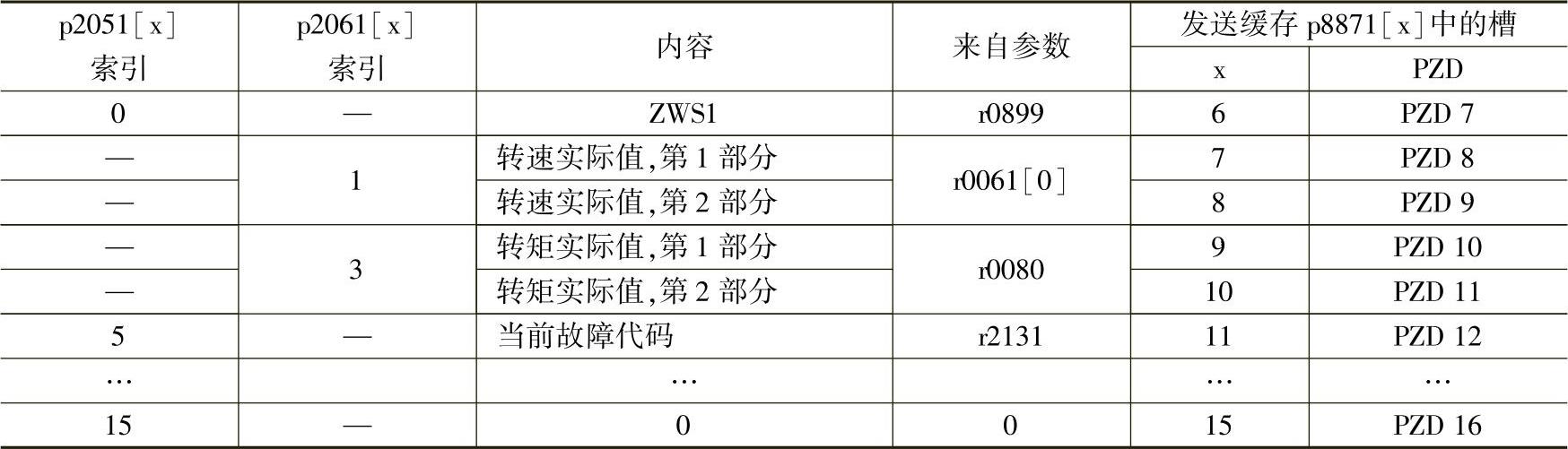
编制控制单元1(DO1)的发送数据见表9-28。
表9-28 编制控制单元1(DO1)的发送数据(https://www.xing528.com)

此报文不需要发送槽PZD16,因此填零。
1)双字(如1+2)需要指定两个连续的发送槽,例如p2061[1]⇒p8871[1]=PZD 2和p8871[2]=PZD 3。
2)将之后的PZD输入p2051[x]或p2061[2x]的相应参数槽。
3)p8871[0…15]中未使用的槽会填零。
4)节点发送报文中PZD的顺序由其参数p8871[0…15]中相应槽位的输入值确定。
5)报文会在下一个总线周期发送。
2.接收数据
所有节点发送的报文同时在SINAMICS Link上供各节点使用。每条报文的长度为16PZD。每条报文都会带有发送者标记。为对应的节点从所有报文选择希望接收的PZD。最多可对16个PZD进行编辑。
说明
若设置了p2037=2,未取消对位10的分析,则接收数据的第一个字(PZD 1)必须为控制字,其位10=1。在此示例中,控制单元2从控制单元1的报文中接收所有数据。执行以下步骤来接收数据:
1)在参数p8872[0…15]中输入需要从中读取一个或多个PZD的节点的地址(例如p8872[3]=1⇒从节点1读取PZD 4,p8872[15]=0⇒不读取PZD 16)。
2)在设置结束后可以通过r2050[0…15]或r2060[0…15]查看数值。
控制单元2的接收数据见表9-29。
表9-29 控制单元2的接收数据
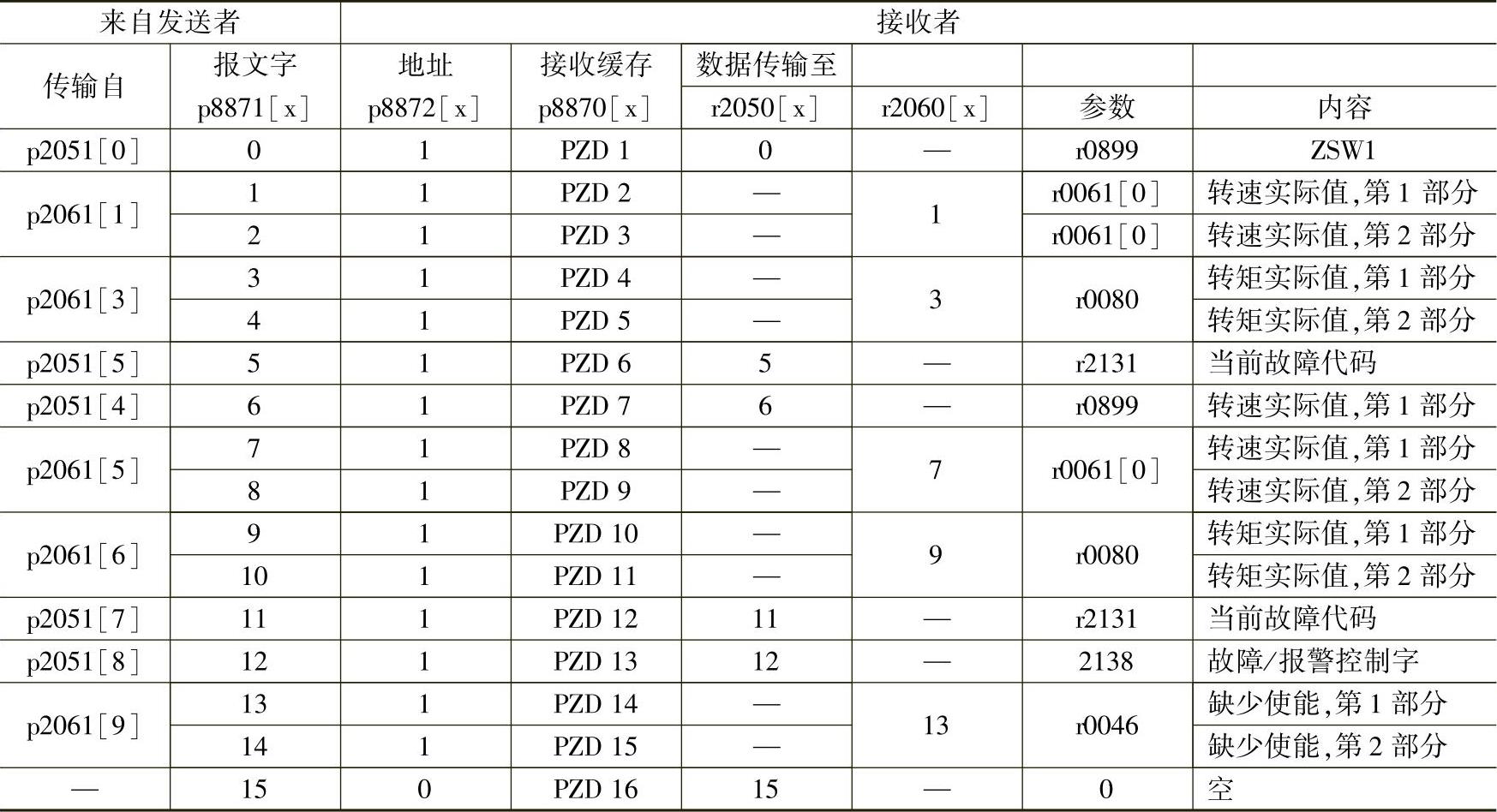
说明
对于双字,必须连续读取2个PZD。读取一个32位设定值,其位于节点2发出的报文的PZD 2+PZD 3上,并将其映射在节点1的PZD 2+PZD 3上:
p8872[1]=2,p8870[1]=2,p8872[2]=2,p8870[2]=3。
3.激活
在所有节点上执行重新上电,便可以激活SINAMICS Link连接。p2051[x]/2061[2x]的设置、显示参数r2050[x]/2060[2x]的互联无需重新上电便可修改。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。